Cánh Tay Robot Servo XRP Có Bộ Gắp

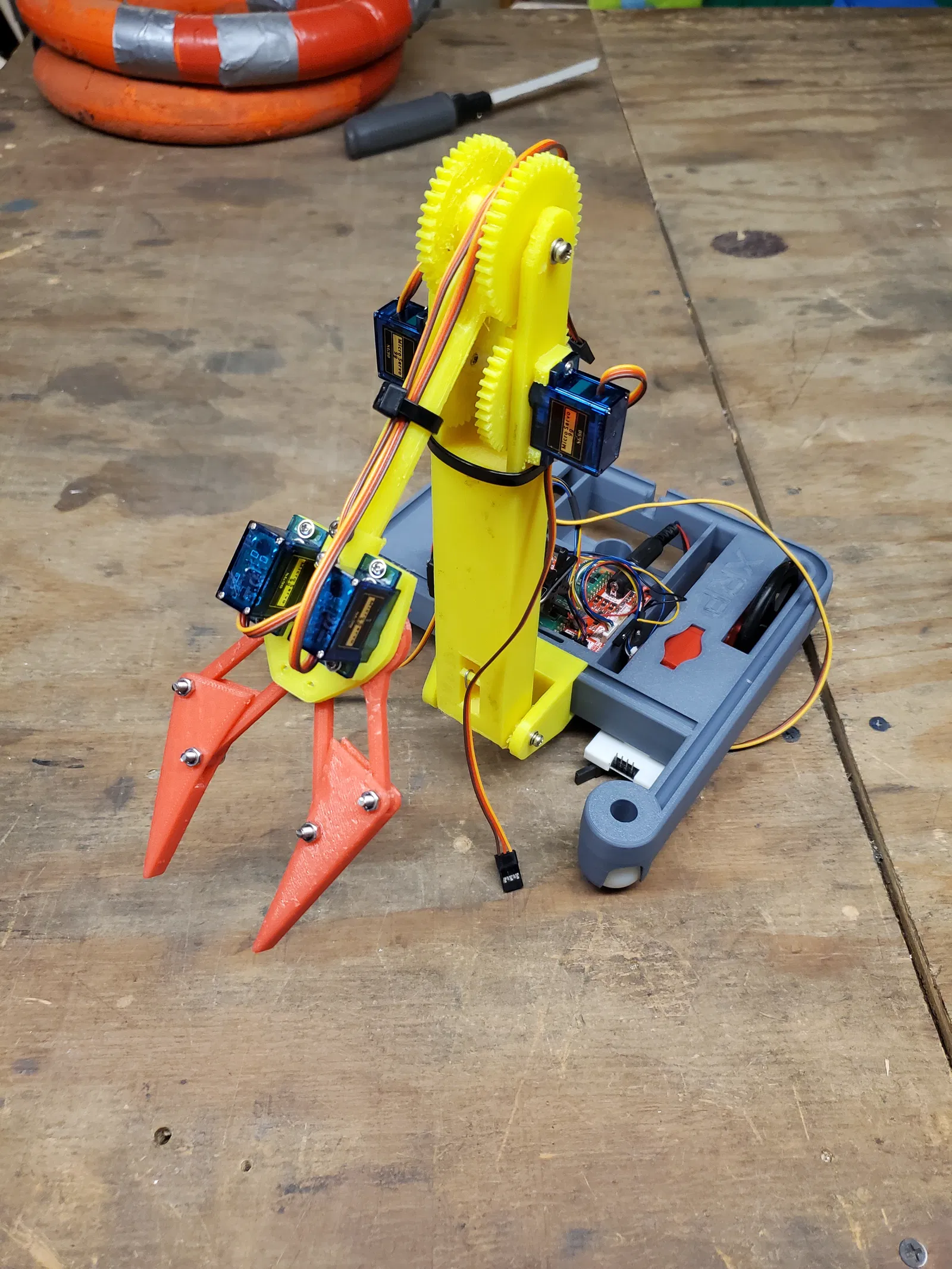
Cánh tay robot XRP này có bộ gắp hai hàm và hai trục, sử dụng năm động cơ servo giá rẻ. Dễ dàng in ấn với 14 bộ phận và hướng dẫn chi tiết. Phù hợp cho sinh viên học lập trình với nền tảng robot XRP.













Mô tả
Tổng quan
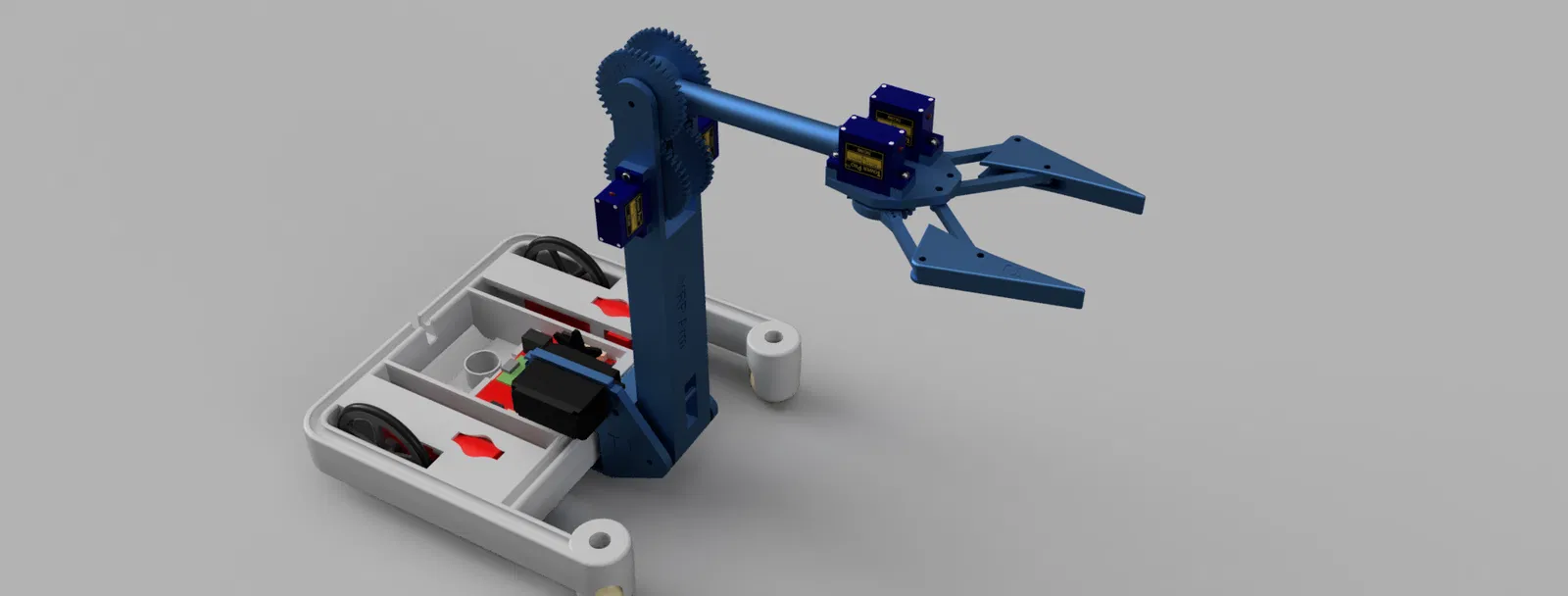
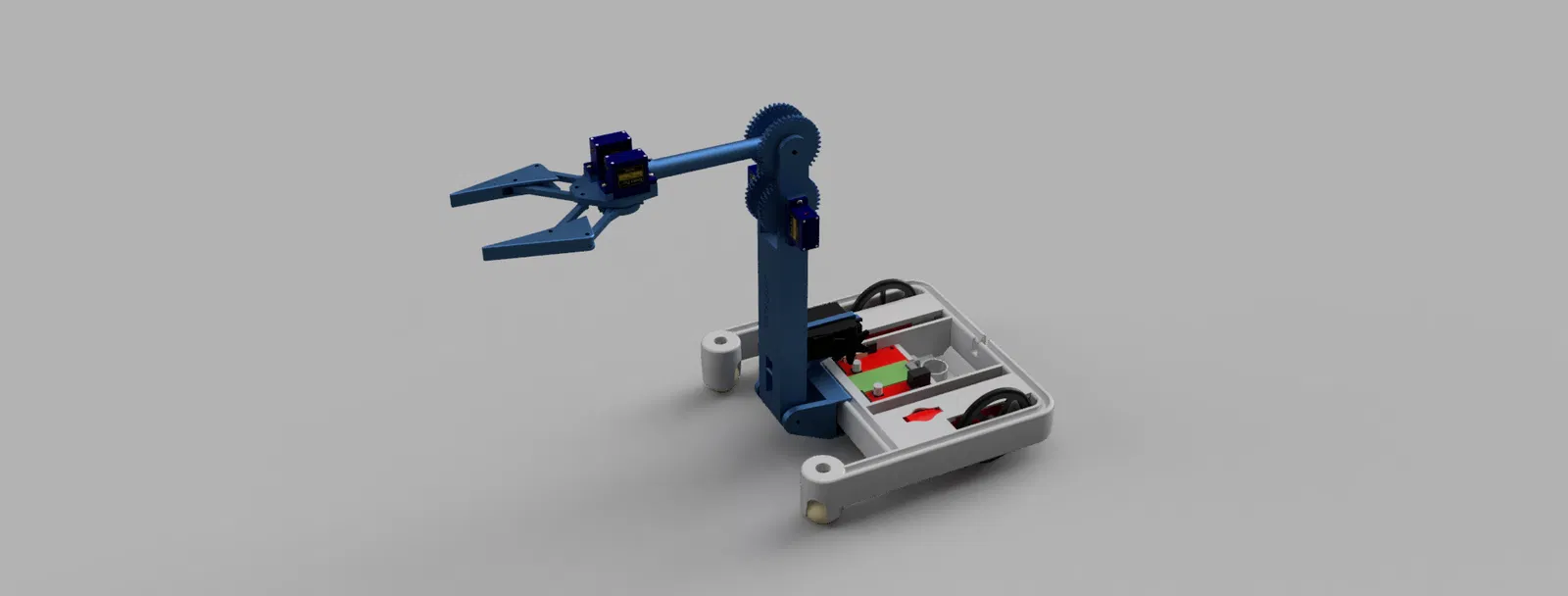
Cánh tay robot này có hai trục và một bộ gắp hai hàm, cho phép Robot XRP thao tác vật thể một cách hiệu quả. Với thiết kế cánh tay này, các bạn học sinh sử dụng nền tảng robot XRP có thể nâng cao kiến thức lập trình với một cơ chế độc đáo để điều khiển cùng với đế di chuyển.
Phần cứng
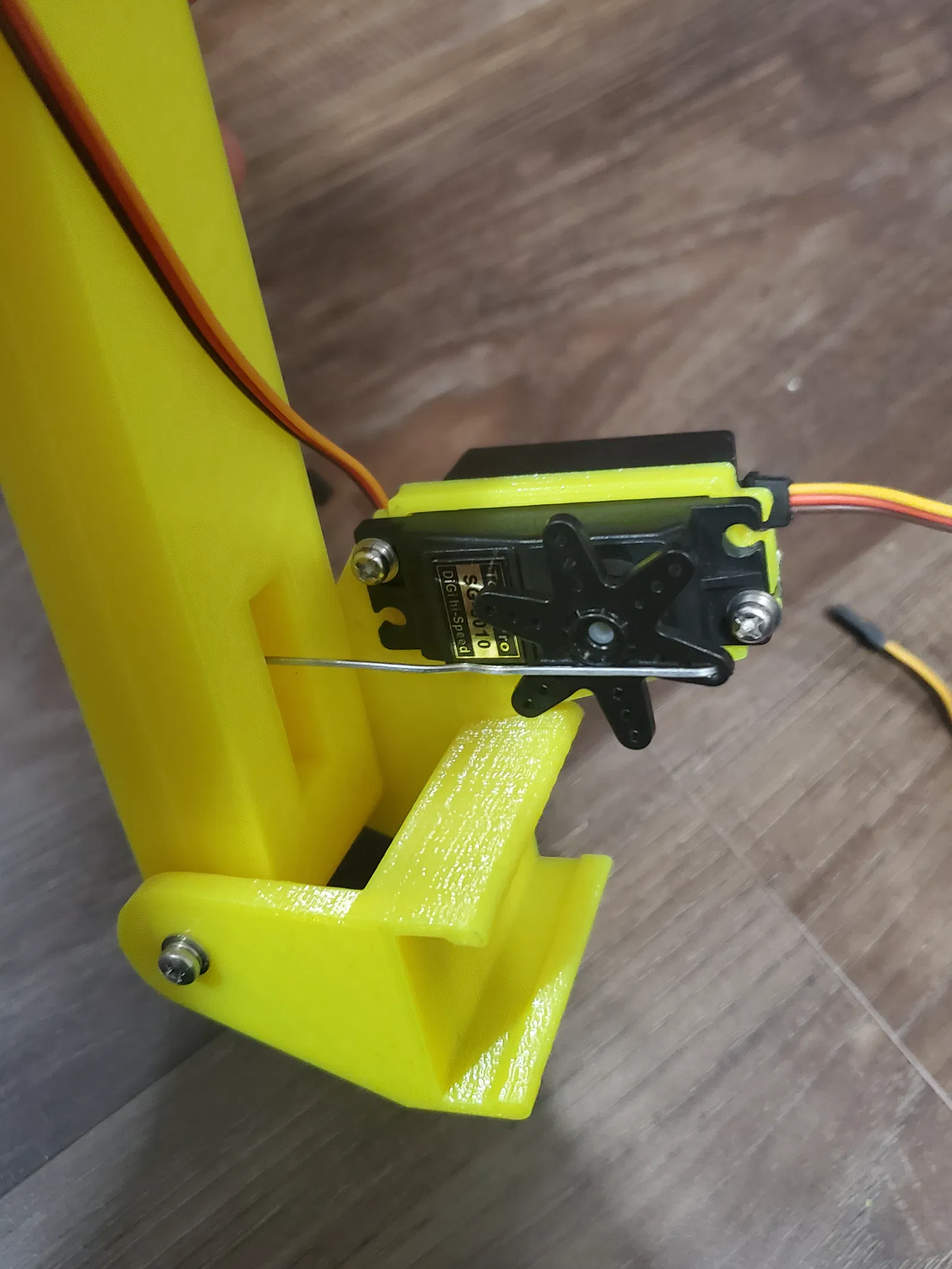
Thiết kế này sử dụng năm động cơ servo giá cả phải chăng: bốn động cơ Towerpro sg90 và một động cơ Servo TowerPro SG-5010 (có thể sử dụng động cơ tương đương không có thương hiệu để tiết kiệm chi phí).
Để cố định cánh tay, bạn có thể sử dụng ốc M3 thông thường. Tôi đã dùng sáu con dài 8mm, sáu con dài 16mm và hai con dài 20mm. Nếu bạn có các độ dài khác, bạn có thể sử dụng chúng miễn là chúng lắp vừa với mô hình. Một số ốc, như những con đi vào trục cánh tay và những con trên các liên kết bộ gắp, sẽ ren trực tiếp vào nhựa in, vì vậy bạn có thể cần điều chỉnh kích thước lỗ theo kích thước lỗ mà máy in của bạn tạo ra.
Các ốc còn lại dùng để gắn servo đều đi kèm với động cơ servo.
Hướng dẫn in
Mô hình này được thiết kế để dễ in bằng cách chia thành 14 bộ phận. Tôi đề xuất in với 4 lớp vỏ, 20% mật độ lưới hình lục giác bằng PLA hoặc PETG trên bất kỳ máy in FDM 3D thông thường nào.
Bốn bộ phận cần hỗ trợ được đánh dấu bằng chữ nổi. Các bộ phận có chữ nổi này nên được in với chữ hướng xuống khay in. Đối với các bộ phận khác, không khuyến khích sử dụng hỗ trợ nhưng tùy chọn.
Lập trình
Khi lập trình cánh tay, hãy nhớ rằng các động cơ servo điều khiển bộ gắp và trục thứ hai của cánh tay được kết nối cơ học. Do đó, điều quan trọng là chúng phải được hiệu chuẩn sao cho chúng không chống lại nhau và di chuyển cùng nhau.
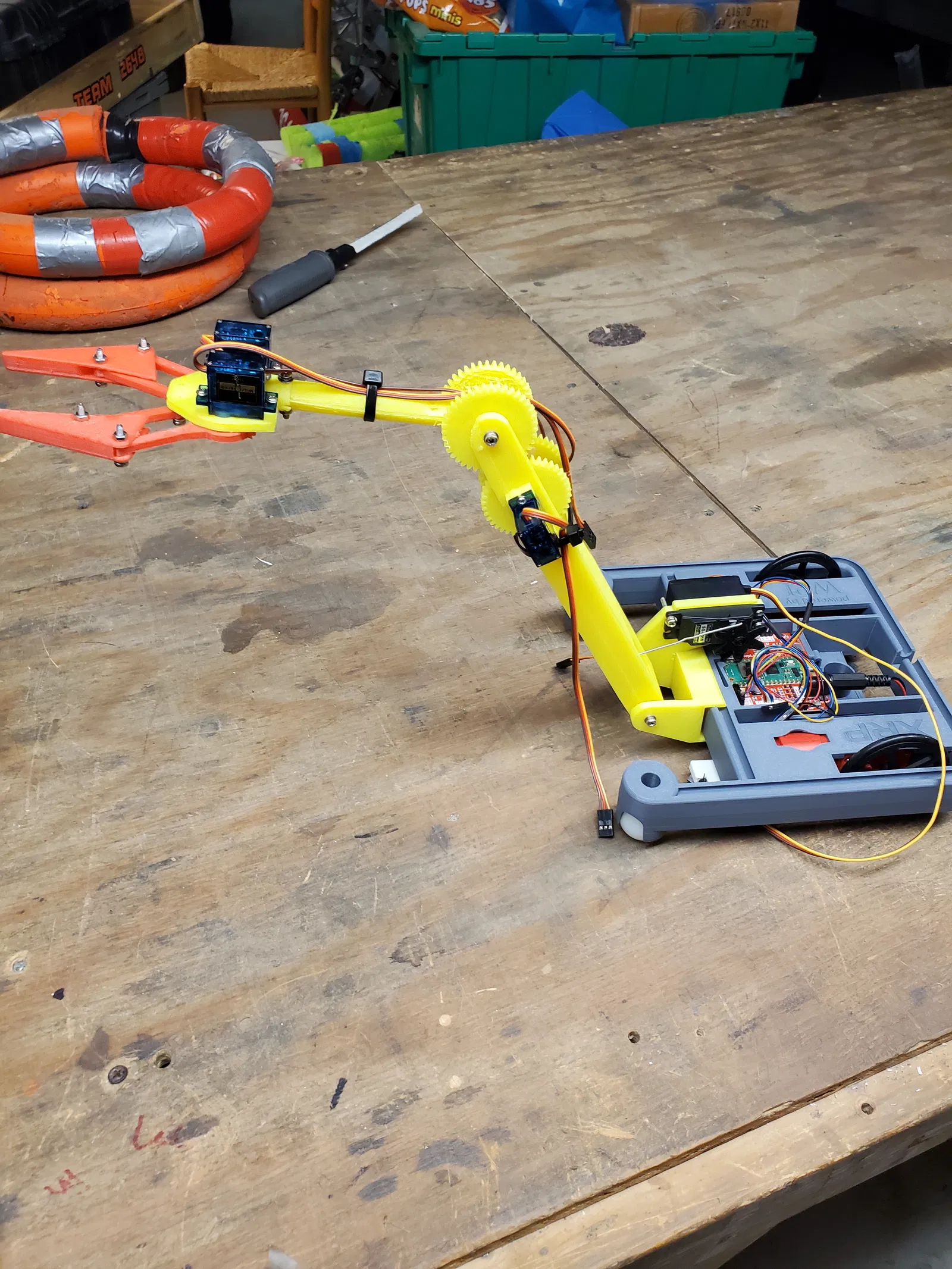
Động cơ servo lớn hơn có thể được nối với cánh tay lớn hơn bằng một kẹp giấy uốn cong, đi từ trục servo đến cánh tay như trong hình.
Danh sách vật tư (BOM)
Ốc M3: https://a.co/d/09i2cNSR
Động cơ Servo 9g: https://a.co/d/0g25o19t https://www.sparkfun.com/products/9065
Servo cỡ tiêu chuẩn: https://a.co/d/00uPYWGV https://www.sparkfun.com/products/9347
Hướng dẫn lắp ráp
-
Đầu tiên, chúng ta sẽ lắp ráp bộ phận gắp của robot. Đầu tiên, vặn hai động cơ servo SG90 vào tấm giữ bộ gắp.

-
Tiếp theo, cố định thanh nối và thanh nối trục servo vào hàm bằng hai ốc 16mm. Trục servo có thể được gắn vào phần bánh răng.

-
Sau đó, gắn hai thanh vào đế bộ gắp bằng cách gắn trục servo và vặn các thanh nối bằng hai ốc M3 dài 8mm.


-
Sau đó, luồn đầu của cánh tay bánh răng vào phía sau đế bộ gắp và cố định bằng hai ốc 20mm.

-
Sau đó, chuyển sang cánh tay chính lớn hơn. Tương tự như bộ gắp, gắn động cơ vào cánh tay và gắn trục servo với bánh răng được hiển thị.

-
Bước tiếp theo là gắn hai đoạn cánh tay với nhau. Để làm điều này, luồn trục vào cánh tay và di chuyển trục cùng với cánh tay phụ vào giữa hai nhánh của cánh tay lớn. Khi đã định vị đúng, luồn một ốc M3 dài 8mm vào cả hai mặt của trục. Cánh tay sẽ quay khi động cơ ăn khớp với cánh tay.


-
Sau khi đã hoàn thành hai cánh tay và bộ gắp, hãy chuyển sang đế của cánh tay. Gắn động cơ SG-5010 vào đế như hình minh họa. Gắn trục servo vào động cơ.

-
Sau đó, gắn cánh tay vừa lắp ráp vào đế theo cách chúng ta đã gắn các đoạn cánh tay trước đó.

-
Cuối cùng, sau khi tất cả các bộ phận này được kết nối với nhau, hãy sử dụng một kẹp giấy tiêu chuẩn và uốn cong nó bằng kìm để nối trục servo với cánh tay lớn. Bây giờ bạn đã có một cánh tay được lắp ráp hoàn chỉnh, sẵn sàng sử dụng với Robot XRP.

Giấy phép

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!