Cánh Tay Robot Mini Có Cảm Biến Siêu Âm Cho Người Mới Bắt Đầu

Dự án cánh tay robot mini đầu tiên, tích hợp cảm biến siêu âm HC-SR04, lý tưởng cho người mới bắt đầu. Dùng 5 servo mini, tương thích Arduino UNO. Hướng dẫn lắp ráp chi tiết kèm theo, yêu cầu kỹ năng hàn và một số dụng cụ cơ bản.










Mô tả
Chào mọi người!
Đây là dự án robot đầu tiên của mình, nên mọi người thông cảm nha, nó chưa hoàn hảo đâu và được làm đặc biệt cho người mới bắt đầu. Cũng xin lưu ý là bạn sẽ cần một ít kỹ năng hàn đó và việc lắp ráp cũng sẽ không xong trong vài phút đâu. Cảm ơn!
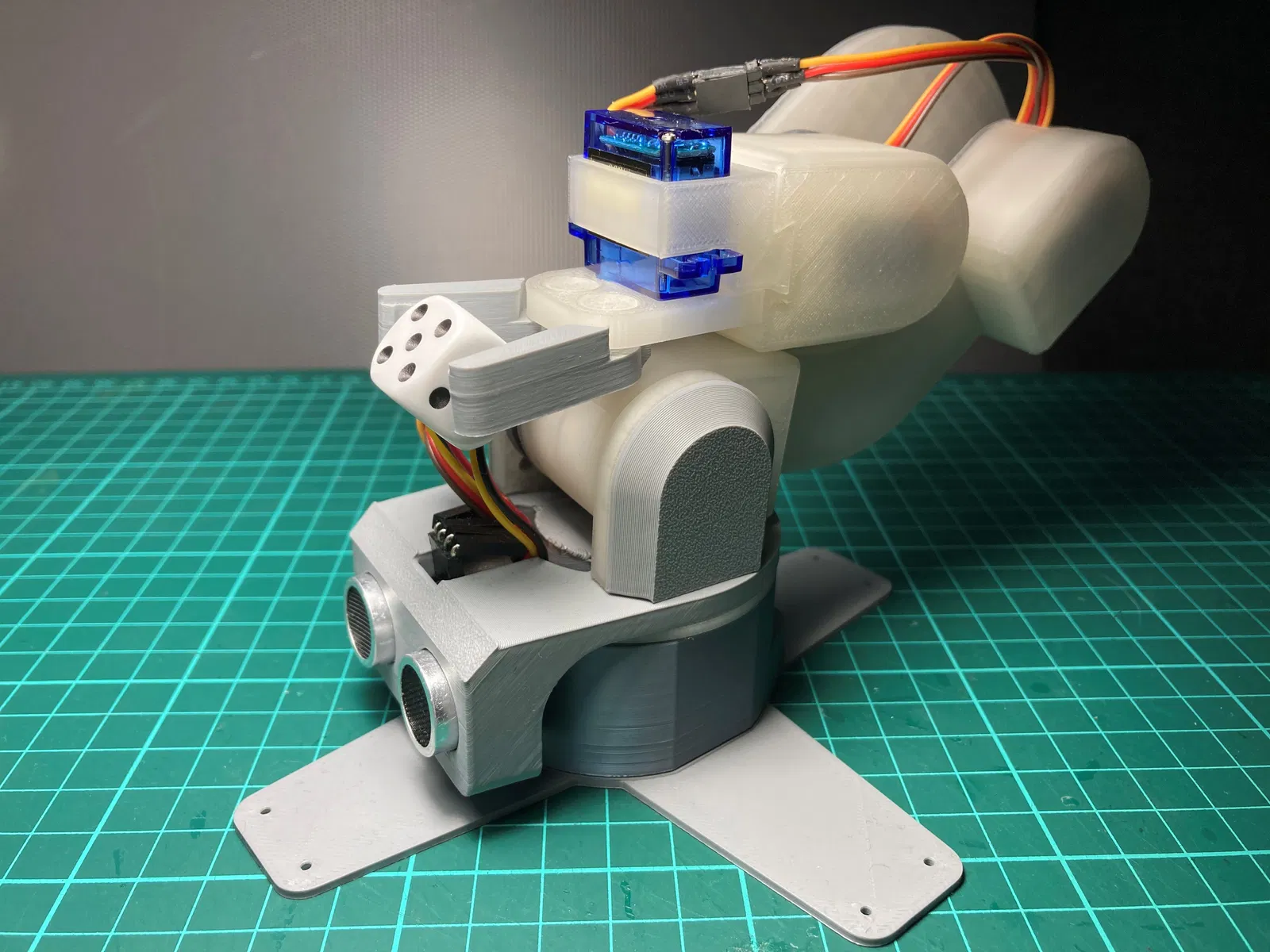
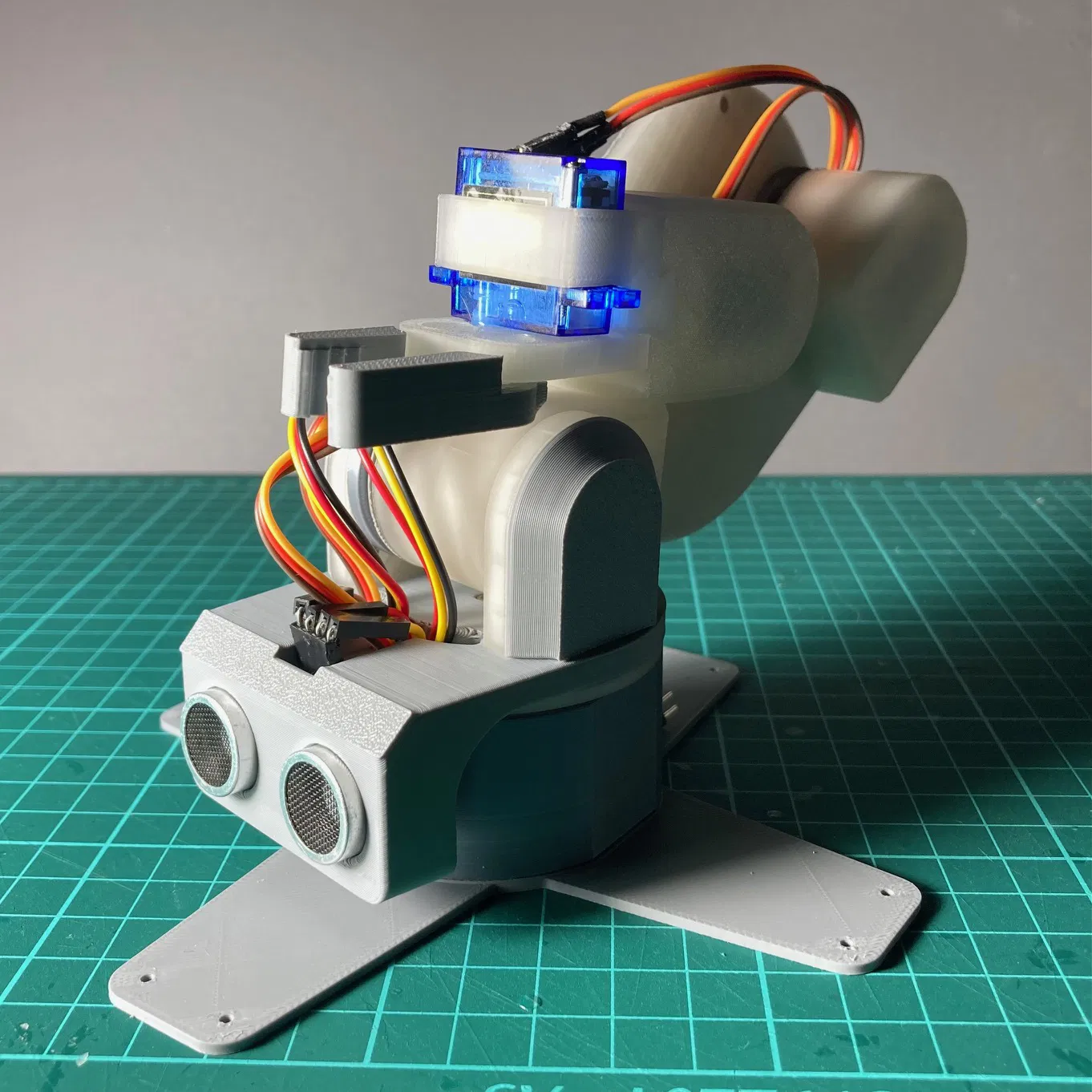
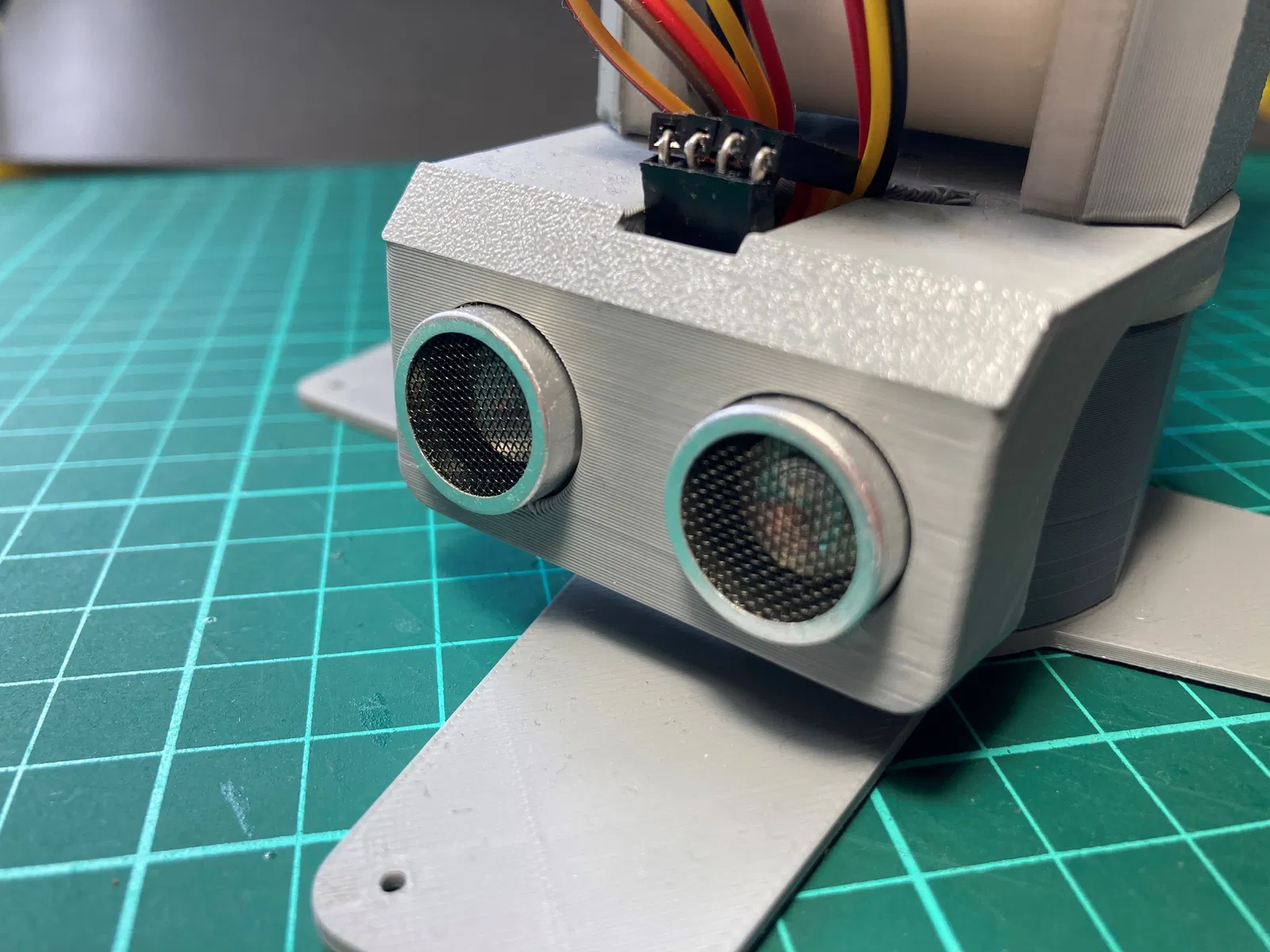
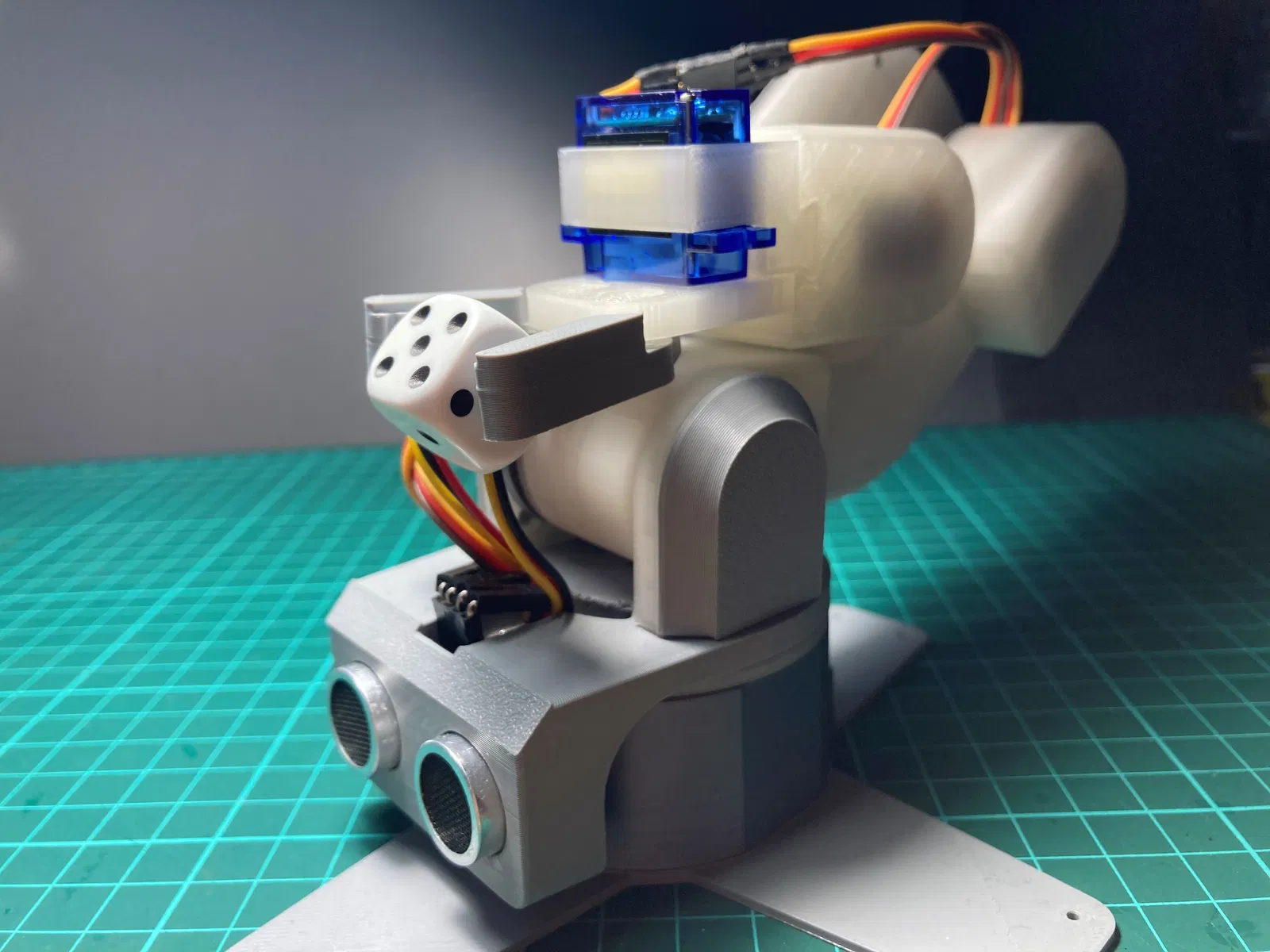
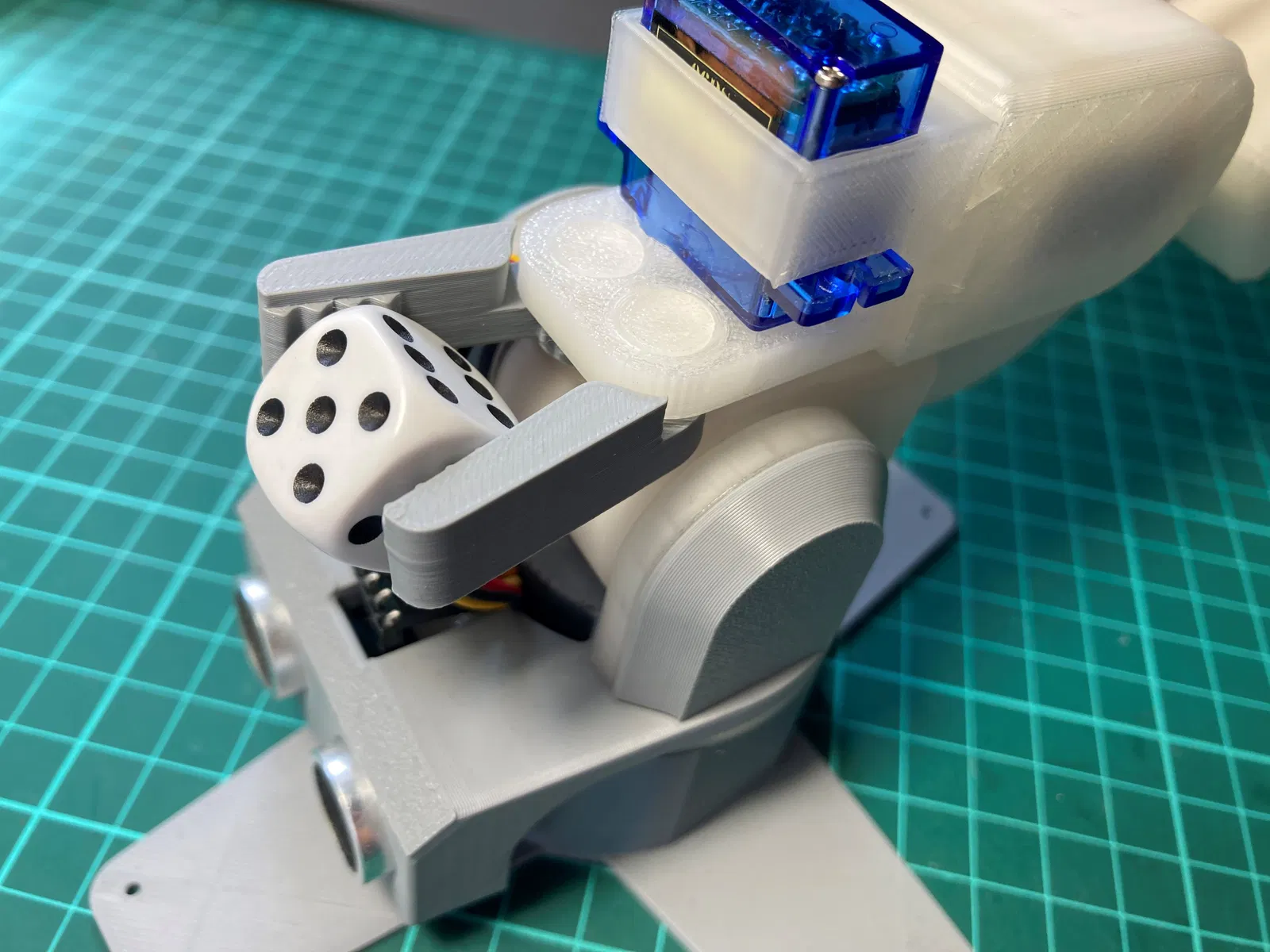
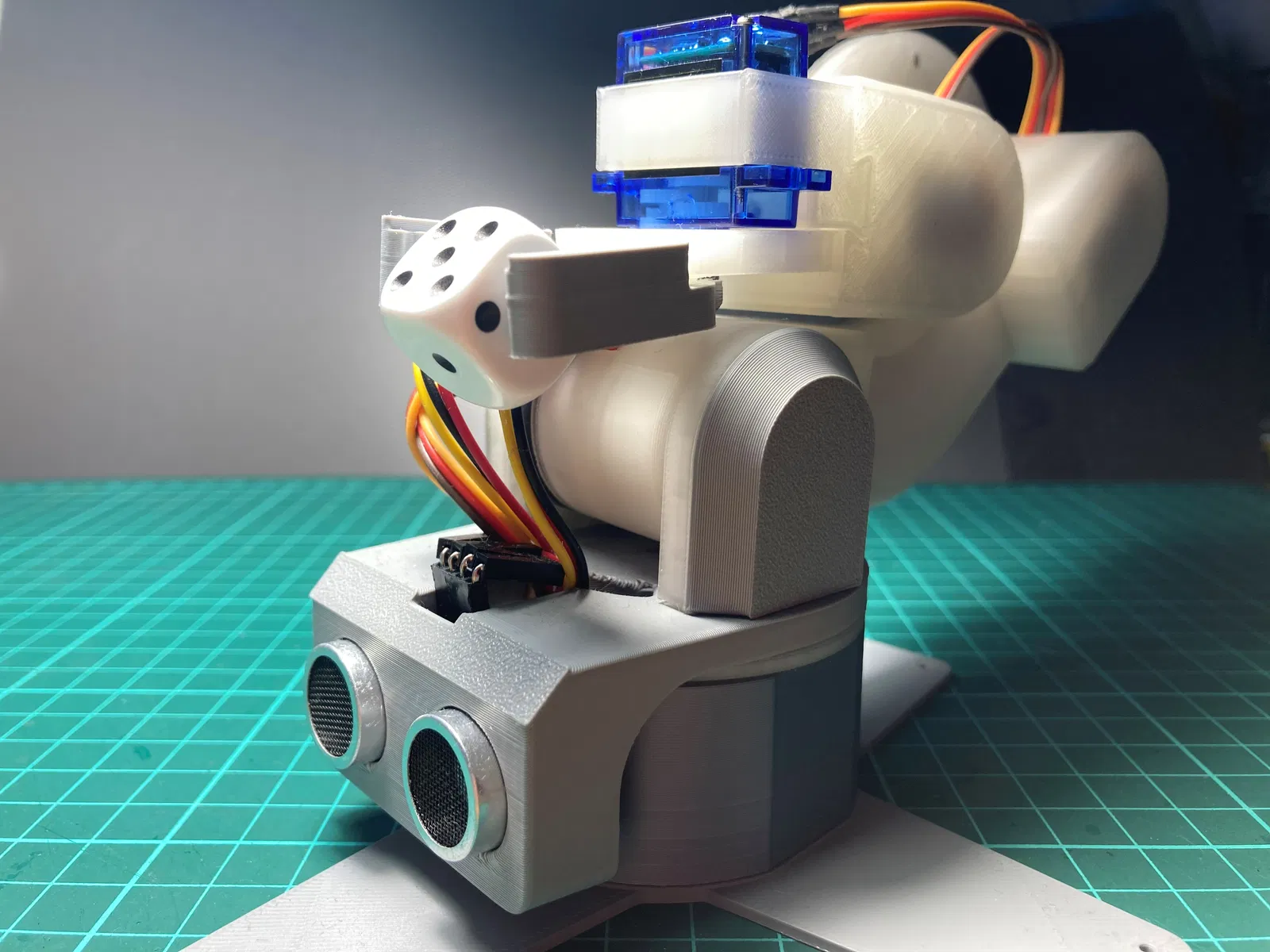
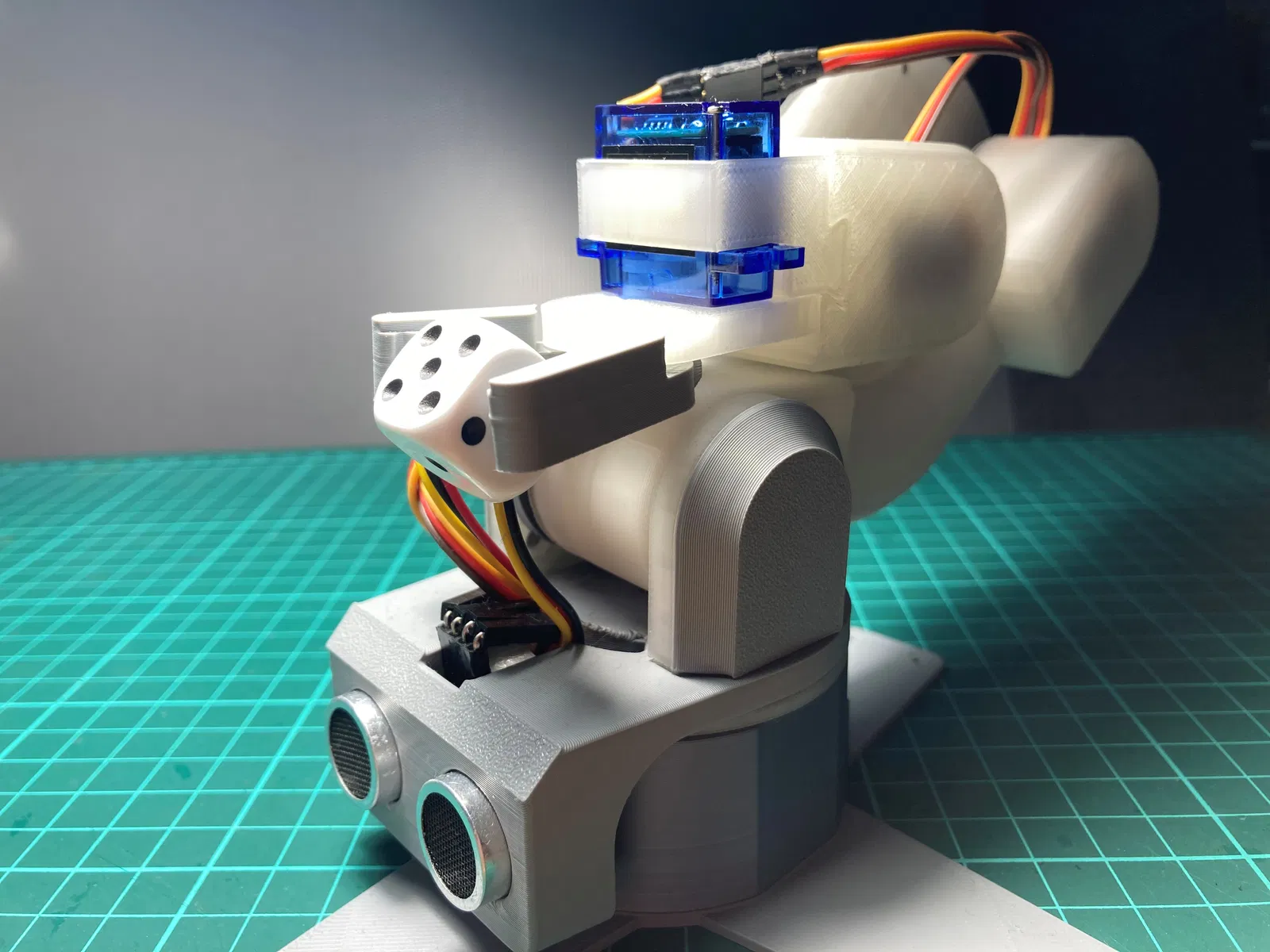
Như đã nói ở trên, cánh tay robot này có cảm biến siêu âm ở phần đế, nên bạn có thể đo khoảng cách giữa cánh tay và một vật thể, rồi sau đó, ví dụ, gắp vật thể đó và thao tác với nó. Cánh tay robot này tương thích với Arduino và trong hướng dẫn lắp ráp, mình sẽ sử dụng bo mạch Arduino UNO.
Bạn cần gì (ngoài các bộ phận in 3D, tất nhiên):
- 5x servo mini 9g (mình dùng servo SG90)
- ốc vít đi kèm với servo
- 1x cảm biến siêu âm HC-SR04 (cảm biến HY-SRF05 không vừa với đế giữ)
- một ít chân cắm header đực và cái (số lượng có trong hướng dẫn lắp ráp)
- keo siêu dính (nếu cần)
- mỏ hàn
- dây nối (cho cảm biến siêu âm)
- 6x dây 10 cm (để nối dài dây servo)
Hướng dẫn lắp ráp có trong file PDF bên dưới.
Cảm ơn các bạn đã quan tâm đến dự án của mình, chúc một ngày tốt lành!
Giấy phép

File mô hình























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!