Kobra S1: Giá đỡ Di dời Cảm biến Dây tóc Tối ưu kèm Bộ nối Y Xoay được

Giá đỡ này giúp di dời cảm biến dây tóc trên Anycubic Kobra S1 combo, khắc phục các hạn chế về ma sát và vị trí. Nó di dời cảm biến thẳng xuống, có bộ nối Y nhẹ xoay tự do và giảm thiểu đường cong dây tóc, giữ vẻ ngoài cân đối. Cần 2 vít M2.5, 2 đai ốc nhiệt M2.5, 3 đầu nối PC4-M6 và các bộ phận in 3D.
1.2K
Lượt Xem
26
Lượt Thích
148
Lượt Tải
Cập Nhật Dec 28, 2025
Mô tả
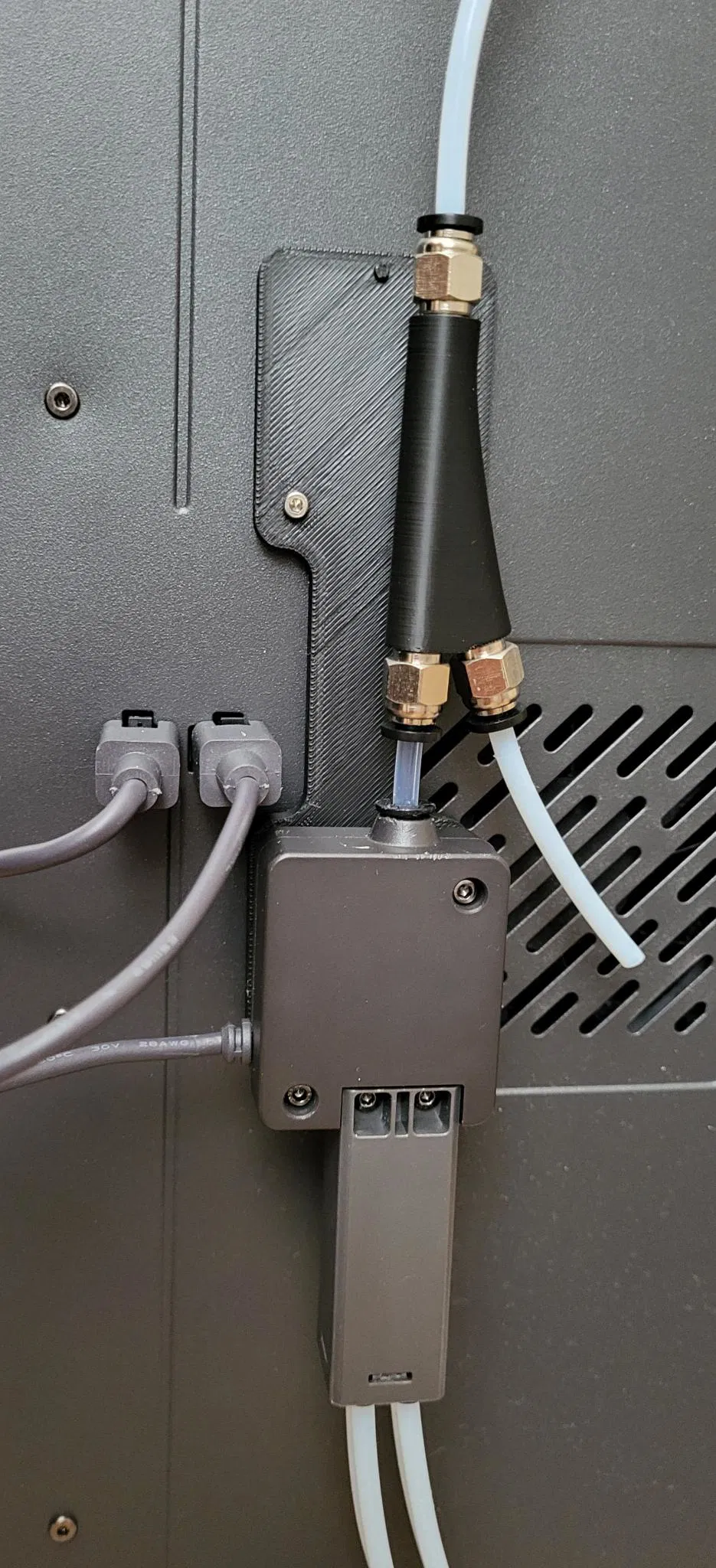
Cái bracket này giúp di dời cảm biến dây tóc (filament sensor) trên máy Anycubic Kobra S1 combo, được thiết kế đặc biệt để khắc phục những hạn chế về ma sát và vị trí mà tôi gặp phải với các giải pháp khác. Các tính năng chính bao gồm:
- Di dời cảm biến thẳng xuống dưới, vừa đủ để tránh các đầu nối ACE.
- Có một bộ nối Y (Y-joiner) nhẹ, cho phép dây tóc mặc định đi thẳng qua.
- Giảm thiểu khoảng cách và độ cong thêm vào trong đường đi của dây tóc.
- Bao gồm bộ nối Y xoay tự do để ống dẫn dây tóc thủ công có thể chỉ về bất kỳ hướng nào.
- Giữ vẻ ngoài cân đối bằng cách tránh dịch chuyển hoặc xoay cảm biến sang một bên.
Vật liệu cần thiết
- 2× vít M2.5 (chiều dài 6-10mm)
- 2× đai ốc nhiệt M2.5
- 3× đầu nối khí nén PC4-M6
- Các bộ phận in 3D
Cài đặt in
- Độ cao lớp: 0.2mm
- Ruột (Infill): 15%
- Hỗ trợ (Supports): Hỗ trợ dạng cây (Tree supports) cho bộ nối Y
- Chất liệu: PLA/PETG
Lắp ráp
- Tháo cảm biến dây tóc.
- Sử dụng đai ốc nhiệt M2.5 cho các lỗ trên phần dưới của bracket.
- Lắp cảm biến vào bracket mới.
- Gắn bracket vào vị trí mà cảm biến dây tóc đã được gắn trước đó.
- Kết nối bộ nối Y và điều chỉnh đến hướng mong muốn. Đảm bảo đẩy hết các ống PTFE vào sâu hết cỡ. Ống nối từ bộ nối Y đến cảm biến dây tóc cần có chiều dài khoảng 50mm.
Thay đổi
- v13: Giảm đường kính lỗ ở phía trên để tránh va vào ống PTFE. Việc vát nhẹ cạnh bên trong ống PTFE phía trên cũng có thể giúp giảm thêm khả năng va chạm.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Đang tải files, vui lòng chờ...


Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!