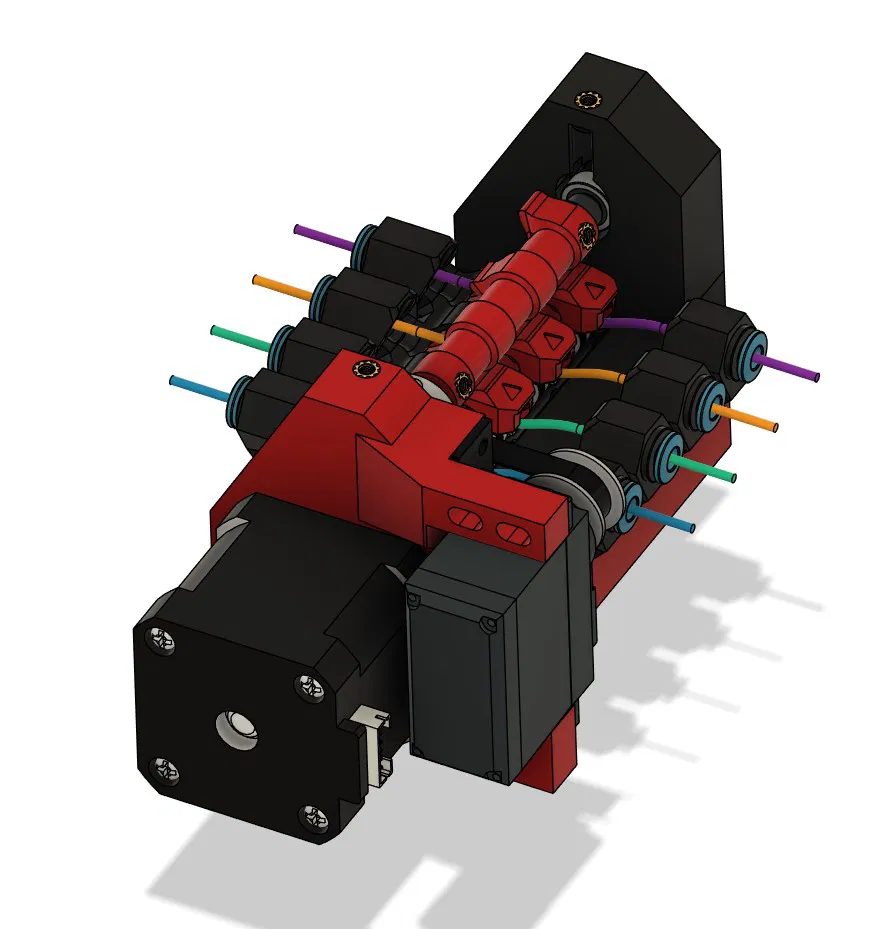
Hard mode Pico MMU

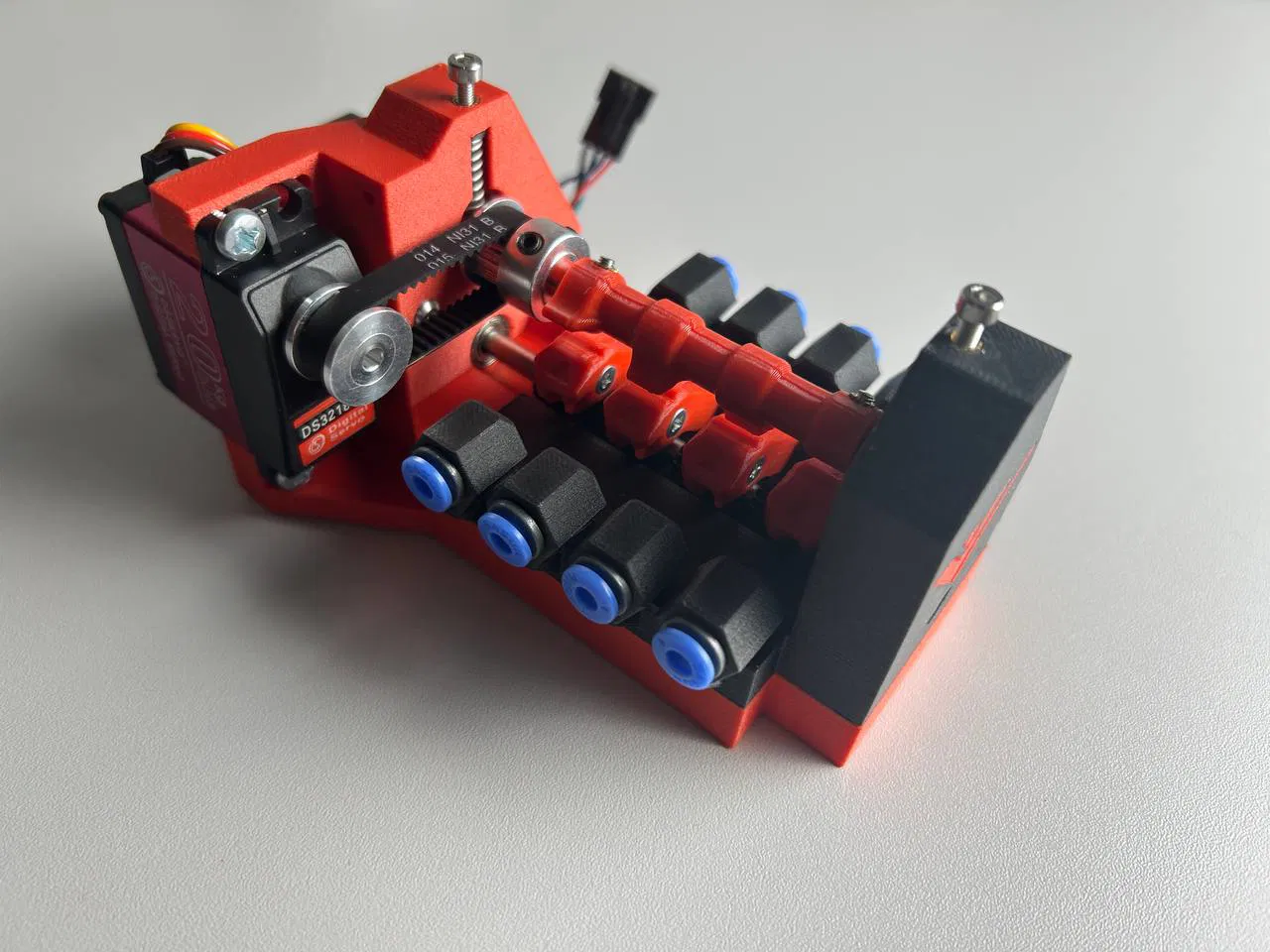
Phiên bản "Hard mode" của Pico MMU, tập trung vào việc cải thiện hoạt động đồng bộ với máy in VZBot, loại bỏ các bộ phận in, đơn giản hóa lắp ráp và tối ưu hóa cơ chế kẹp sợi nhựa. Bao gồm danh sách BOM chi tiết và ghi chú về cấu hình firmware.










Mô tả
Tổng quan dự án
Trước hết, tôi muốn ghi nhận công lao của người tạo ra mô hình gốc. Anh ấy đã làm một công việc xuất sắc, đặc biệt là về firmware và macro. Đó là một ý tưởng thực sự thông minh và được triển khai vững chắc. Tuy nhiên, trong quá trình in, lắp ráp và sử dụng hệ thống trong thực tế, tôi thấy mình muốn xem xét lại, sửa đổi, đơn giản hóa và cải thiện nhiều khía cạnh khác nhau. Theo ý kiến của tôi, tôi đã đạt được chính xác những gì mình hình dung.
Cải tiến chính và Mục tiêu thiết kế
- Tôi đã đặt mục tiêu sử dụng Pico MMU hoạt động đồng bộ với bộ đùn của máy in và cảm biến Belay trên VZBot của mình. Mục tiêu chính của tôi bao gồm:
- Loại bỏ việc sử dụng puly và bánh răng in 3D
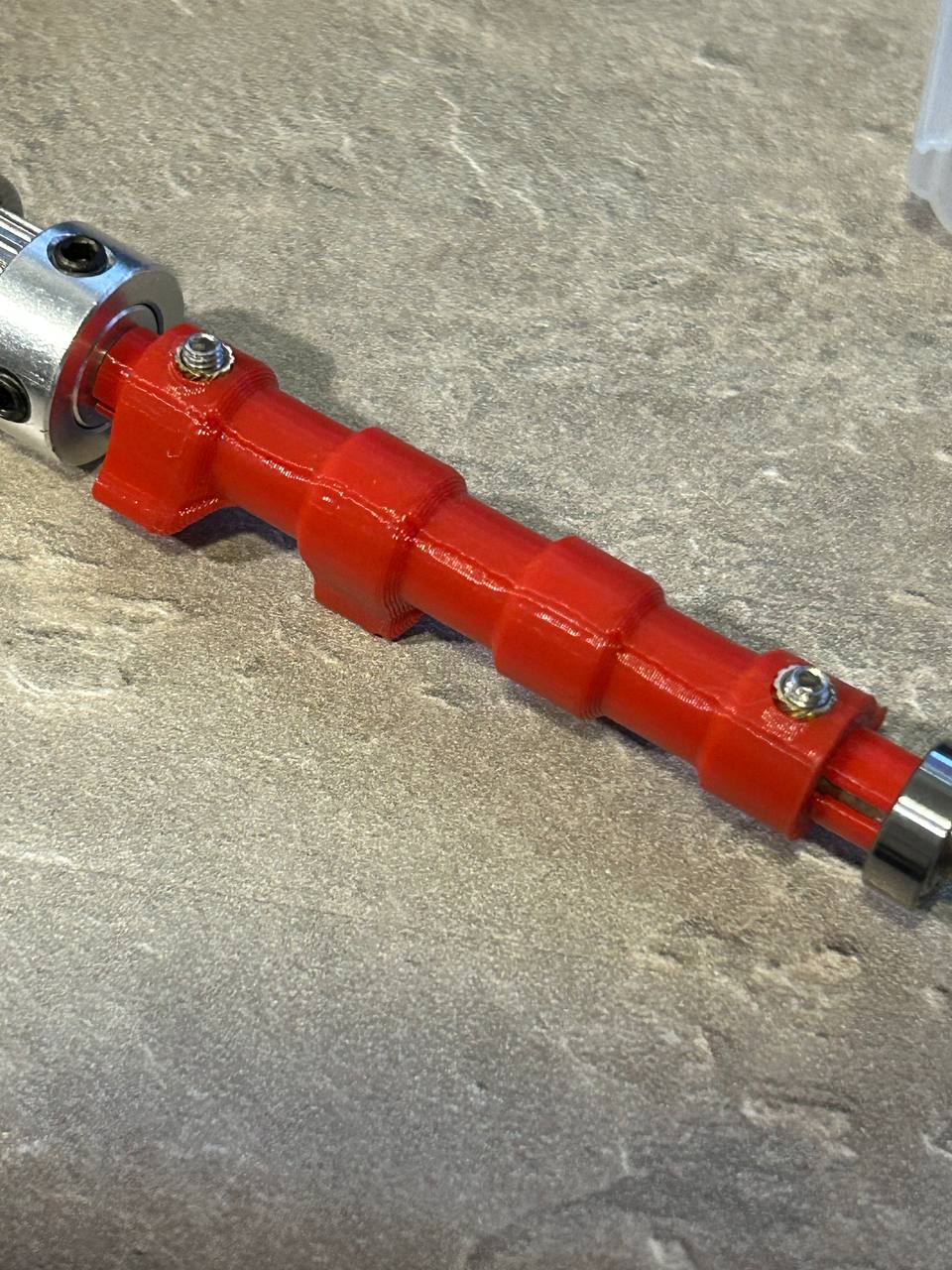
- Tạo cơ chế kẹp sợi nhựa rõ ràng và nhất quán
- Tránh vấn đề tiếng ù của servo, có thể xảy ra trong quá trình in liên tục nếu góc bị lệch nhẹ, gây rung cho servo
- Giảm số lượng bộ phận in 3D và đơn giản hóa quy trình lắp ráp
- Thiết kế bề mặt đáy phẳng để tiện lợi hơn cho việc phát triển giá đỡ
Danh mục vật liệu (BOM):
- Động cơ bước NEMA17 trục 110mm
- Động cơ servo DS3218 Pro-180
- Puly 2GT cho servo, 25 răng
- Puly 2GT cho trục 5mm
- Dây đai thời gian kín 2GT, dài 110mm
- Lò xo: đường kính dây 0.9mm, dài 15mm, đường kính ngoài 6mm
- Trục thép: 5×90mm
- Trục thép: 3×70mm hoặc cắt vít M3
- Bạc đạn MR115
- Bạc đạn MR83
- Bánh răng truyền động tôi cứng BMG
- Côn ECAS-4
- Nhiệt insert (thông số kỹ thuật sẽ được cập nhật sau)
- Vít M3×10
- Vít M3×18–20
- Vít đầu chìm M3 8mm
Lưu ý: Tôi không nhớ rõ thông số kỹ thuật chính xác cho các nhiệt insert — thông tin này sẽ được bổ sung sau.
Ghi chú Điện & Firmware
Tôi đã kết nối mô-đun này trực tiếp vào MCU của máy in. Nếu bạn muốn kết nối nó thông qua EBB (external breakout board), bạn sẽ cần điều chỉnh mod cho phù hợp với thiết lập cụ thể của mình.
Đối với servo DS3218 Pro-180, cần có tín hiệu PWM 5V. Trên bo mạch Octopus Pro, chân Neopixel (RGB) hoặc chân STEP từ một driver không sử dụng đều hoạt động tốt. Các chân khác gây ra hành vi thất thường cho servo.
QUAN TRỌNG! Servo này cần được cấp nguồn trực tiếp từ nguồn 5V, tôi không khuyến khích kết nối nó với MCU.
Firmware và Macros
Tôi cũng đã viết lại các macro từ Pico MMU gốc để cho phép hoạt động đồng bộ với bộ đùn và cảm biến Belay. Tôi sẽ sớm xuất bản mã macro đã cập nhật trên GitHub.
Cấu hình Servo:
[servo sp_servo]
pin: PG4 # Chân Servo
initial_angle: 0
maximum_servo_angle: 180
minimum_pulse_width: 0.000500
maximum_pulse_width: 0.002500
variable_angles: 174, 132, 90, 48
Phát triển sắp tới
Một giá đỡ chuyên dụng cho VZBot hiện đang được phát triển và sẽ được phát hành vào một ngày sau đó.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình













Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!