Robot điều khiển bằng laser

Robot điều khiển từ xa qua Wi-Fi/Internet với 2 trục (xoay ngang và nghiêng). Hoàn toàn là mã nguồn mở (tất cả các tệp thiết kế). Bạn có thể điều khiển nó bằng tay cầm Xbox.






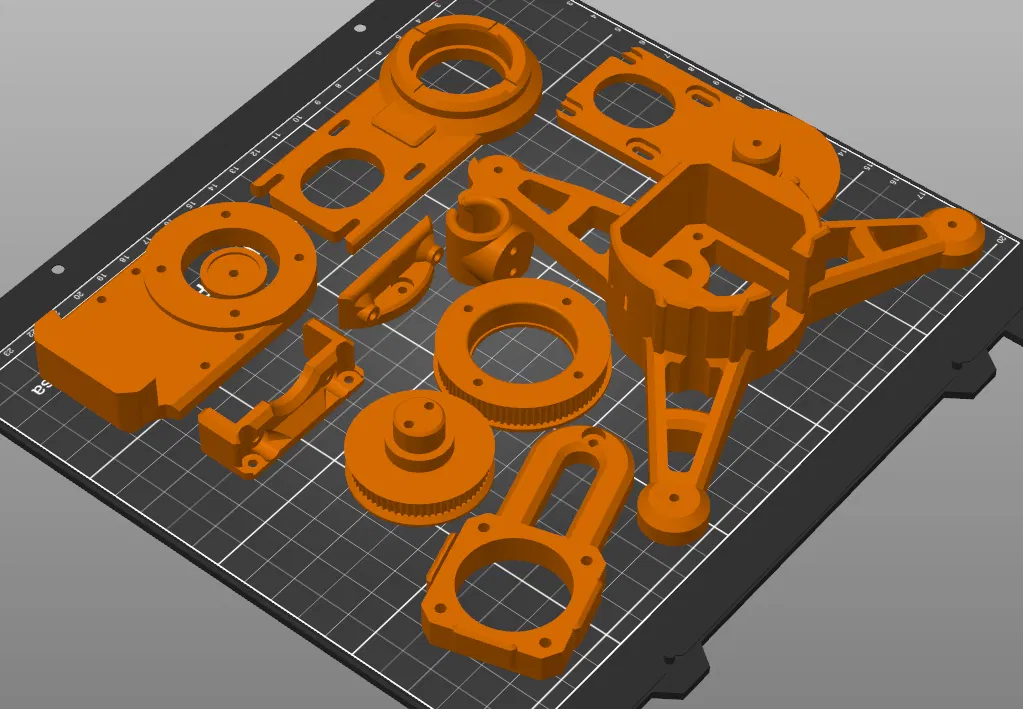







Mô tả
Danh sách các bộ phận:
Số lượng
Bộ phận
Ghi chú
2×
Động cơ bước NEMA 17
Tôi đã dùng loại 17HS4401S 1.8A. Chúng hơi lớn và không khớp hoàn toàn, nhưng với một vài chỉnh sửa thì vẫn dùng được.
2×
Puli GT2, 20 răng
2×
Bạc đạn 6002
2×
Dây đai GT2, 200 mm (200GT2)
2×
Bộ điều khiển động cơ bước
A4988 hoặc ATD5833 (cả hai đều ổn)
1×
Bộ điều khiển vi mô
Arduino, ESP, hoặc loại tương tự (Tôi dùng ESP32 Uno).
—
Ốc M3
Nhiều kích cỡ: 6 mm, 10 mm, 15 mm, 45 mm.
Cá nhân tôi đã sử dụng ESP32 Uno với trình điều khiển ATD5833 và động cơ bước NEMA 17 1.8A. Sử dụng thư viện Arduino Bluepad32, tôi đã lập trình để điều khiển bằng tay cầm Xbox. Khi hoàn thành, tôi sẽ chia sẻ mã nguồn và sơ đồ đấu dây luôn nhé.
Giấy phép

File mô hình

















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!