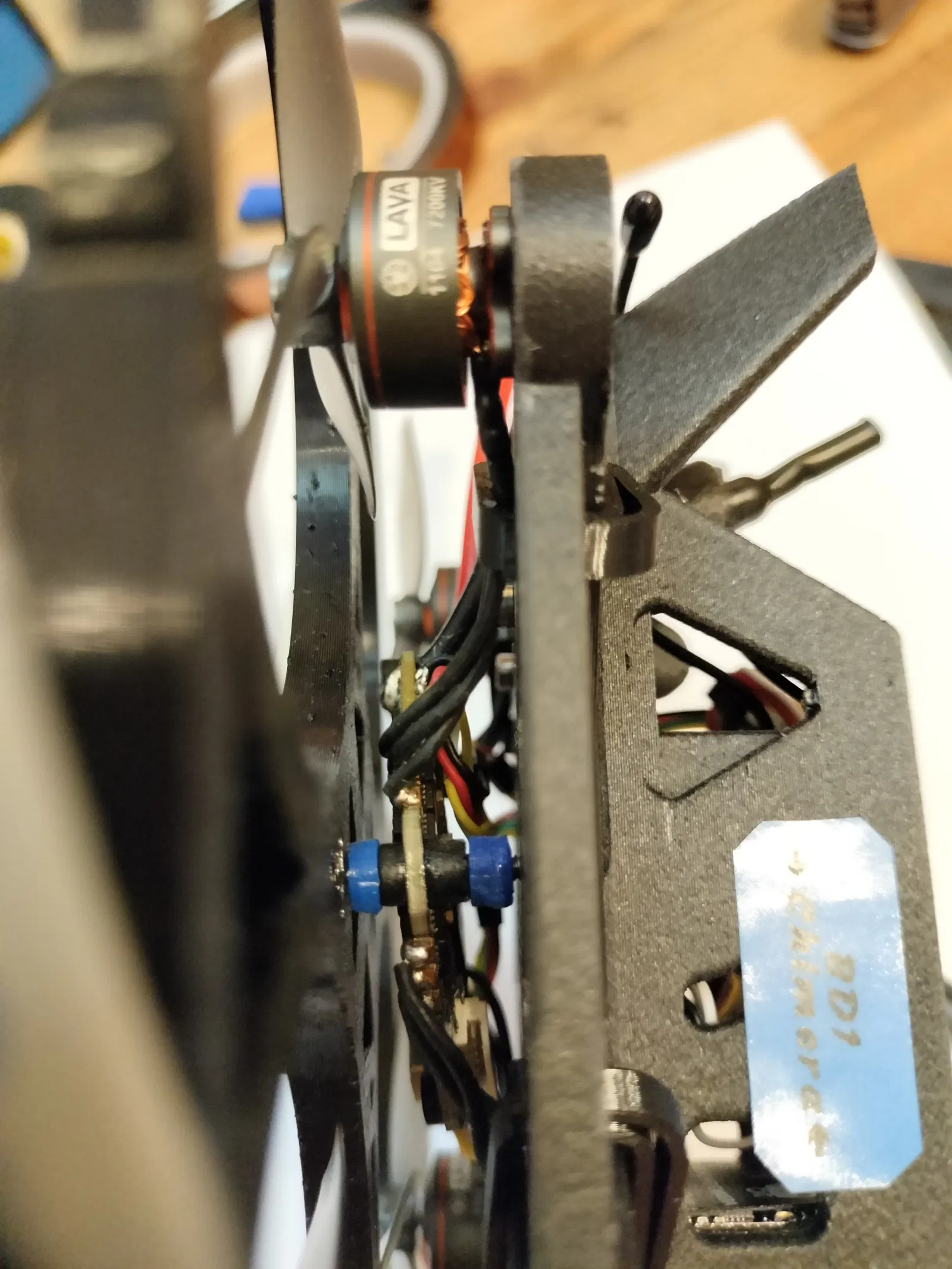
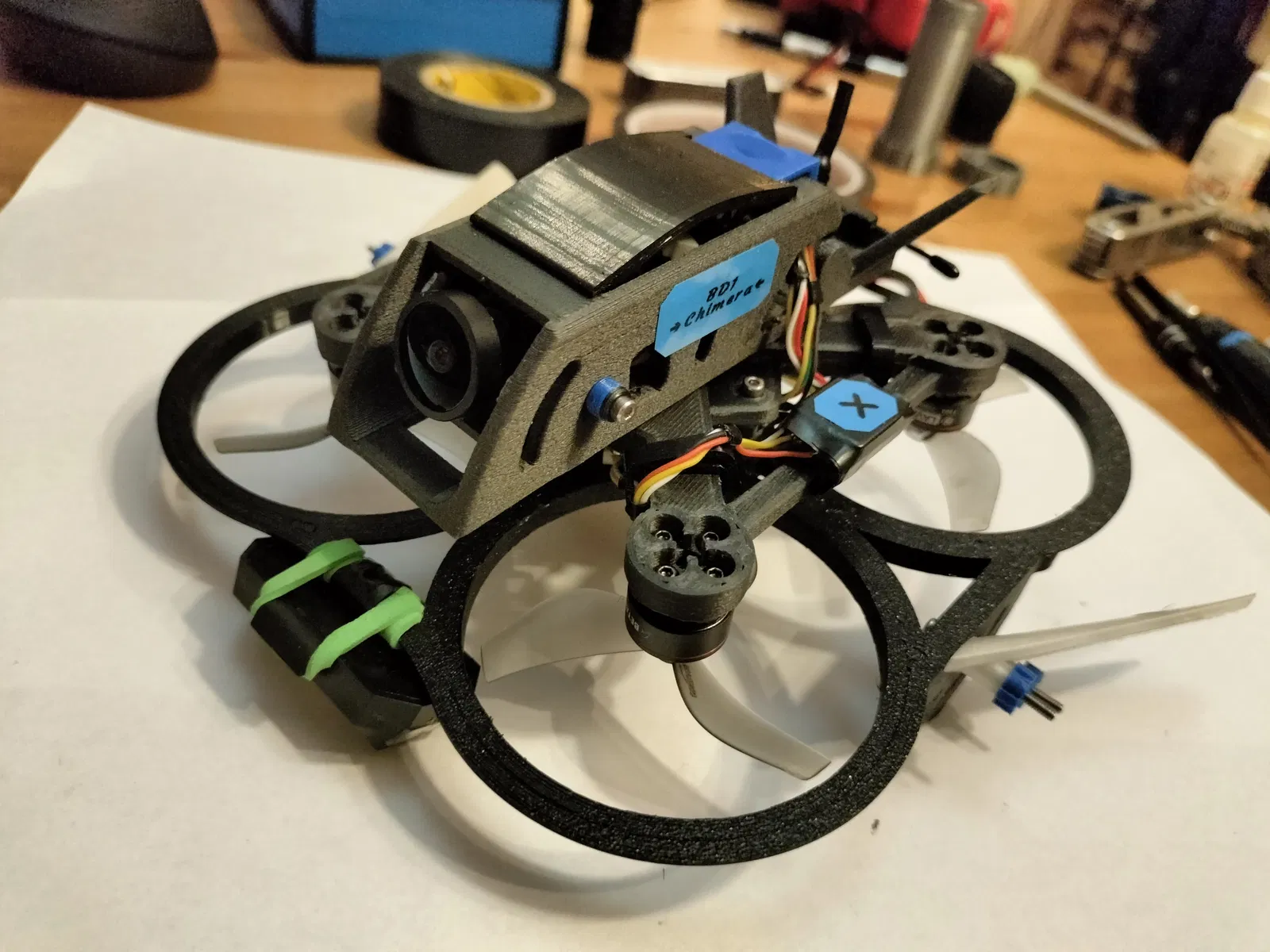
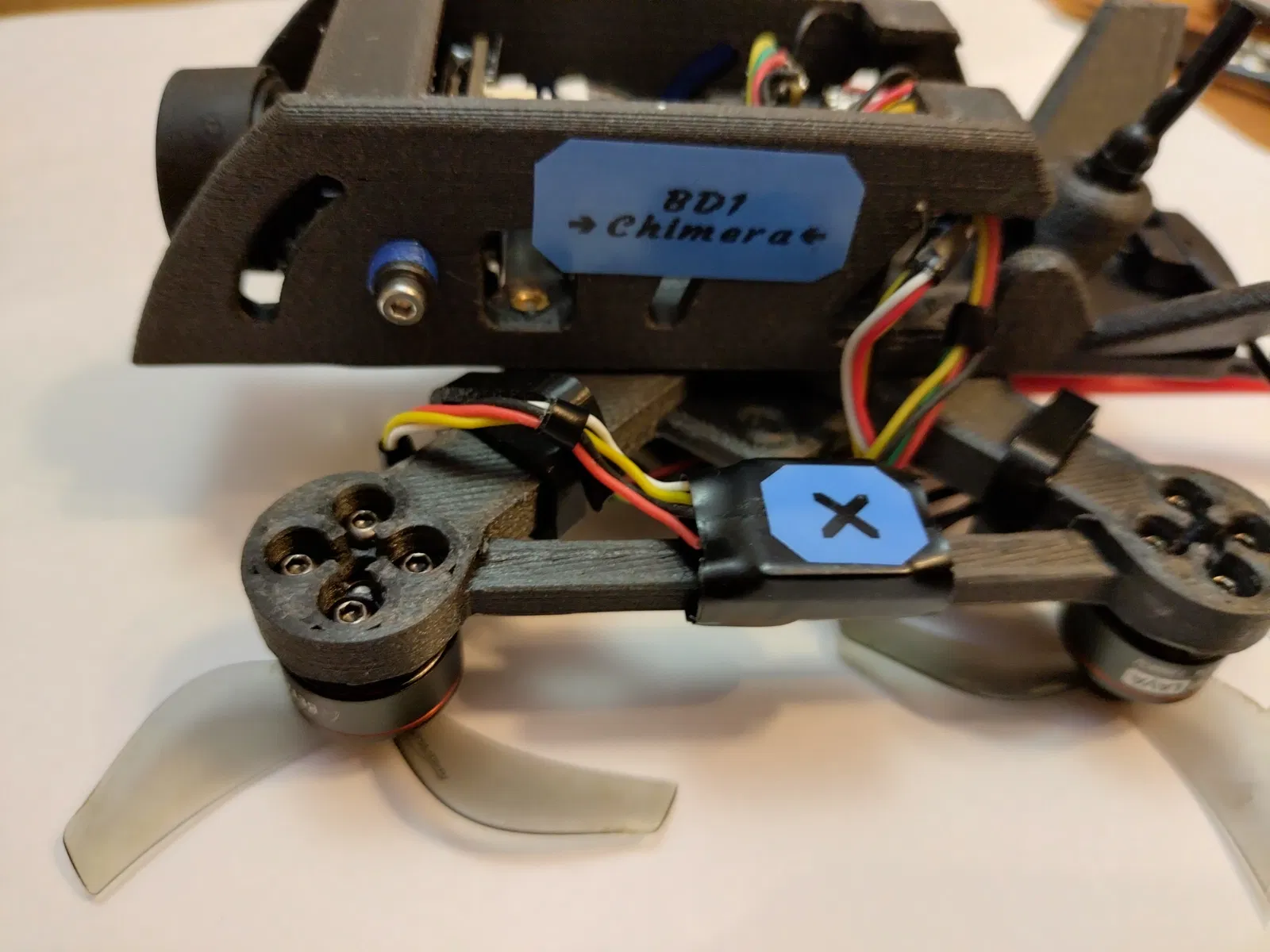
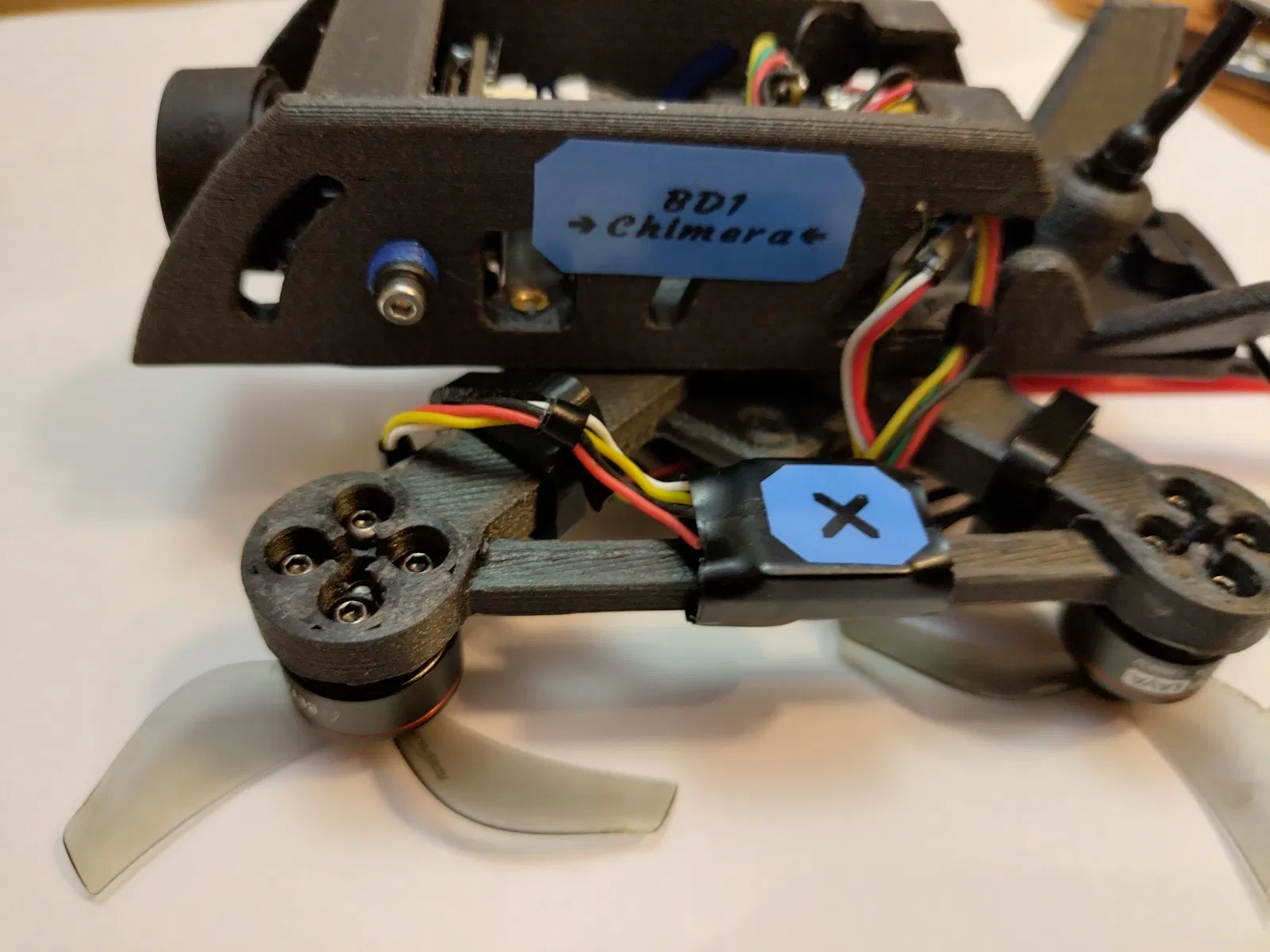
Drone FPV BD1 "Chimera" - Mã nguồn mở 2.2"

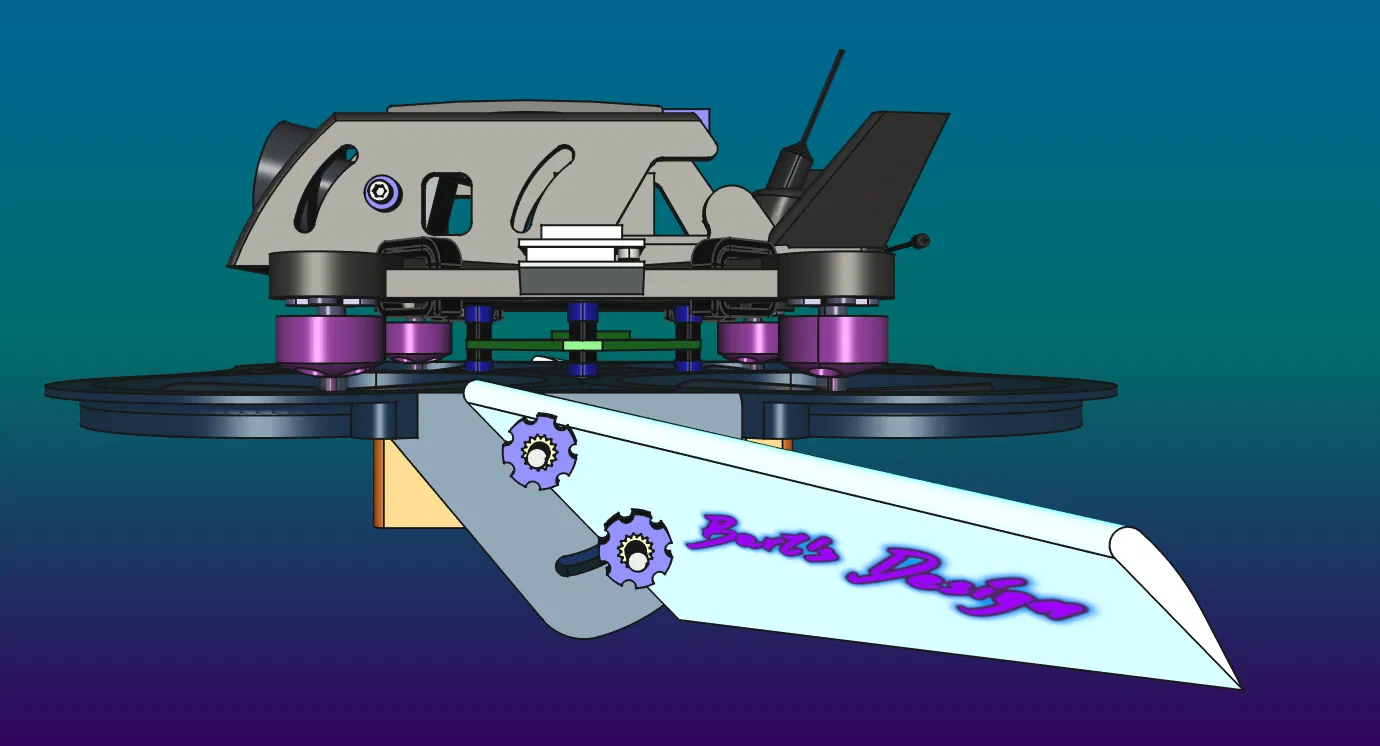
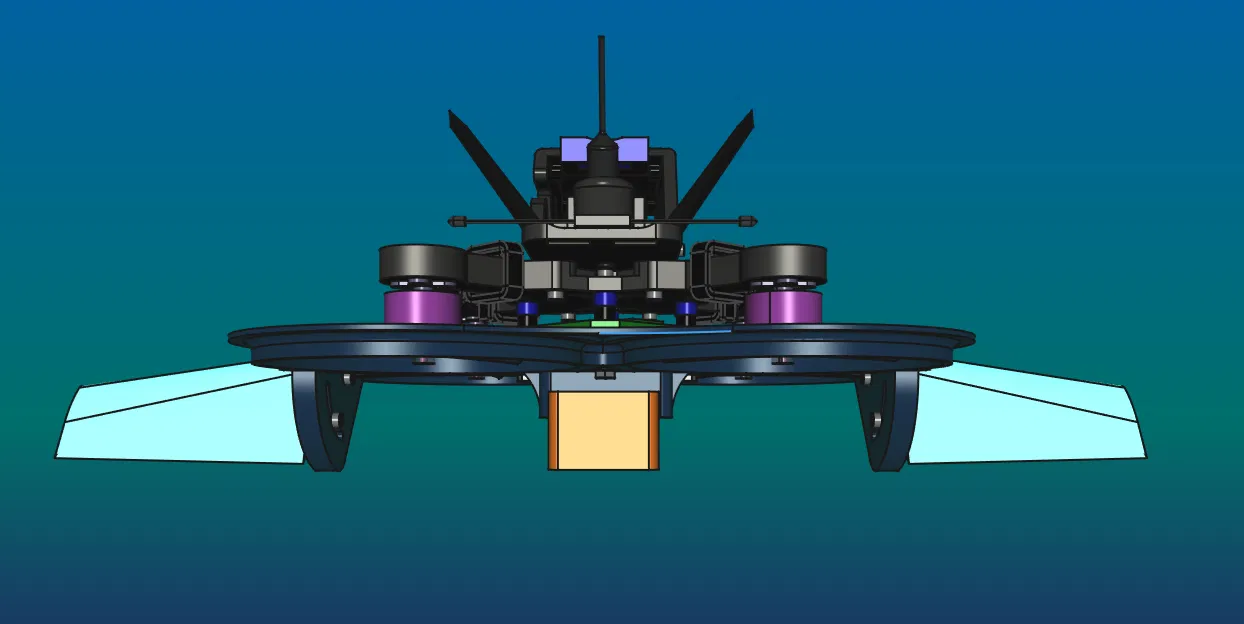
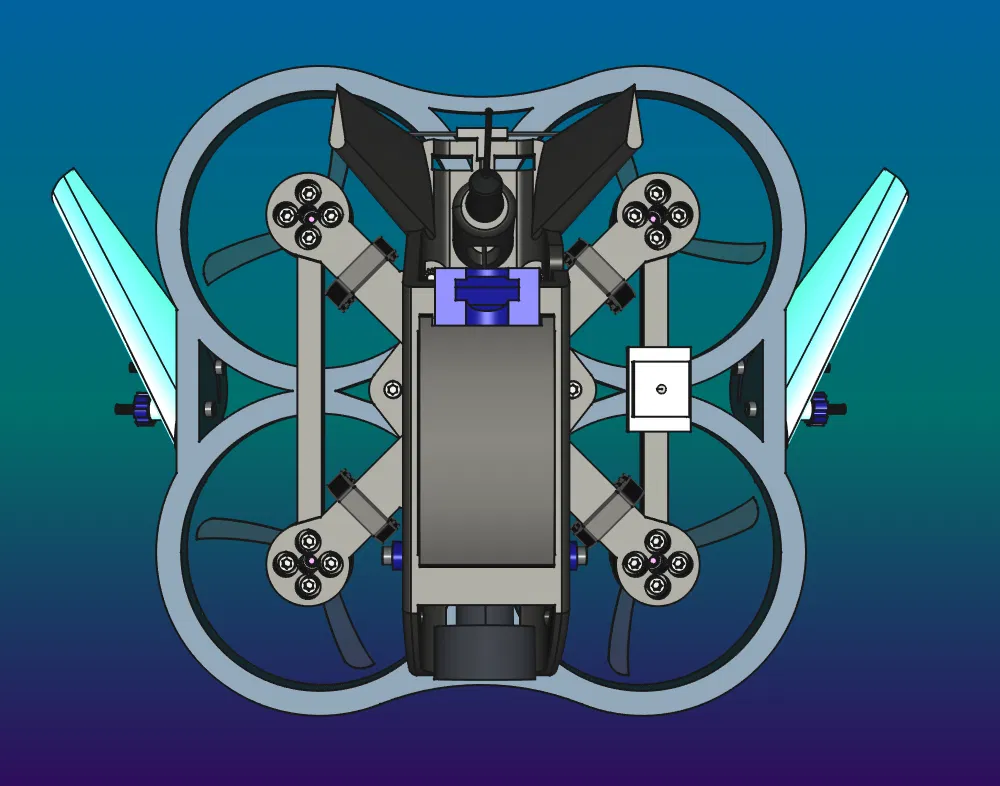
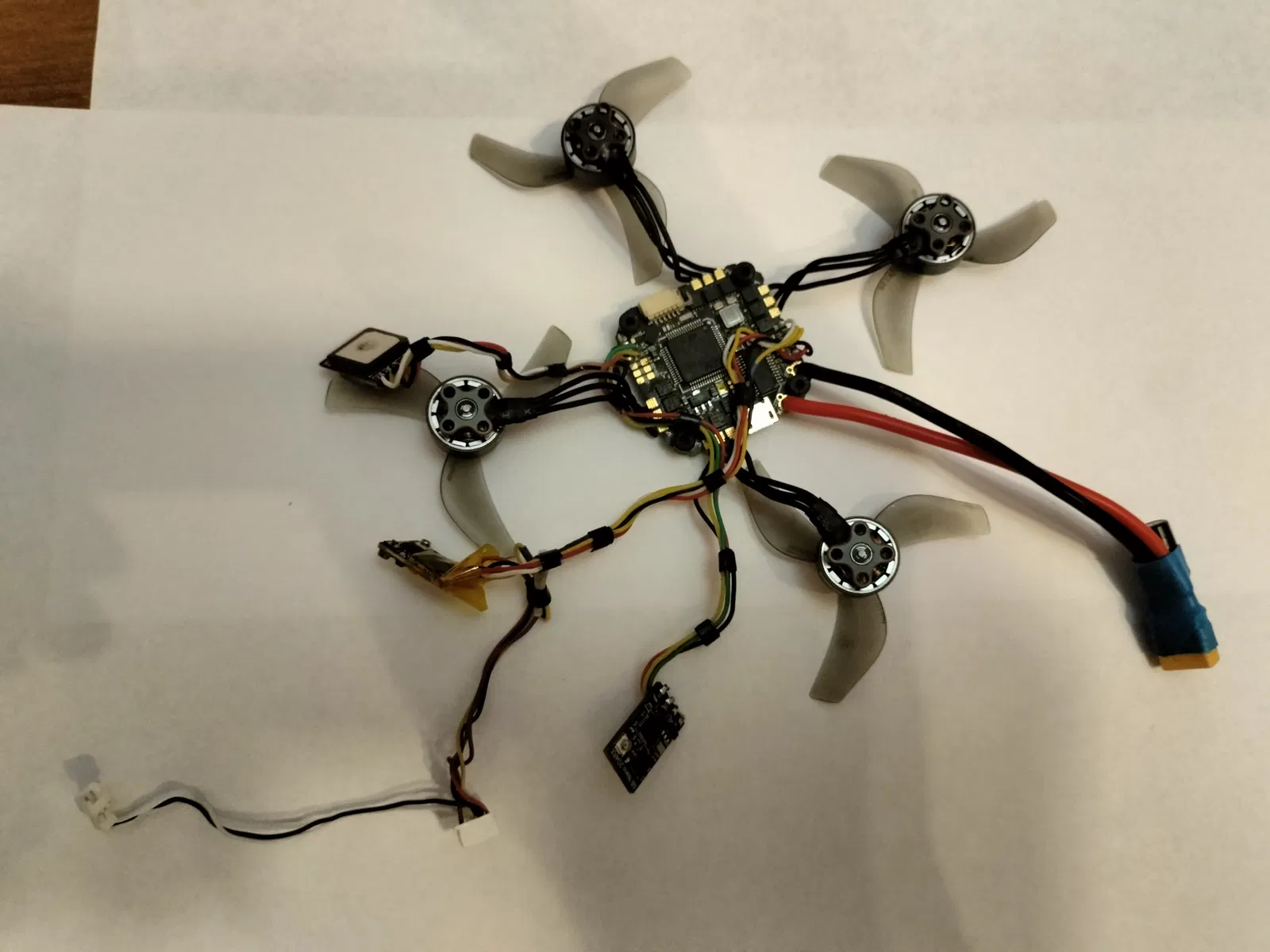
Drone Chimera BD1 là một chiếc cinewhoop freestyle 2.2" hoàn toàn in 3D, sử dụng pin 3S và có thể bay với camera hành trình. Với khối lượng dưới 200g, nó mang lại thời gian bay từ 1,5 đến 5 phút và tốc độ bay tối đa 80km/h. Hướng dẫn chi tiết về in 3D, vật liệu và BOM được cung cấp.


















































































Mô tả

BD1 “Chimale”

Sản xuất tại Ba Lan
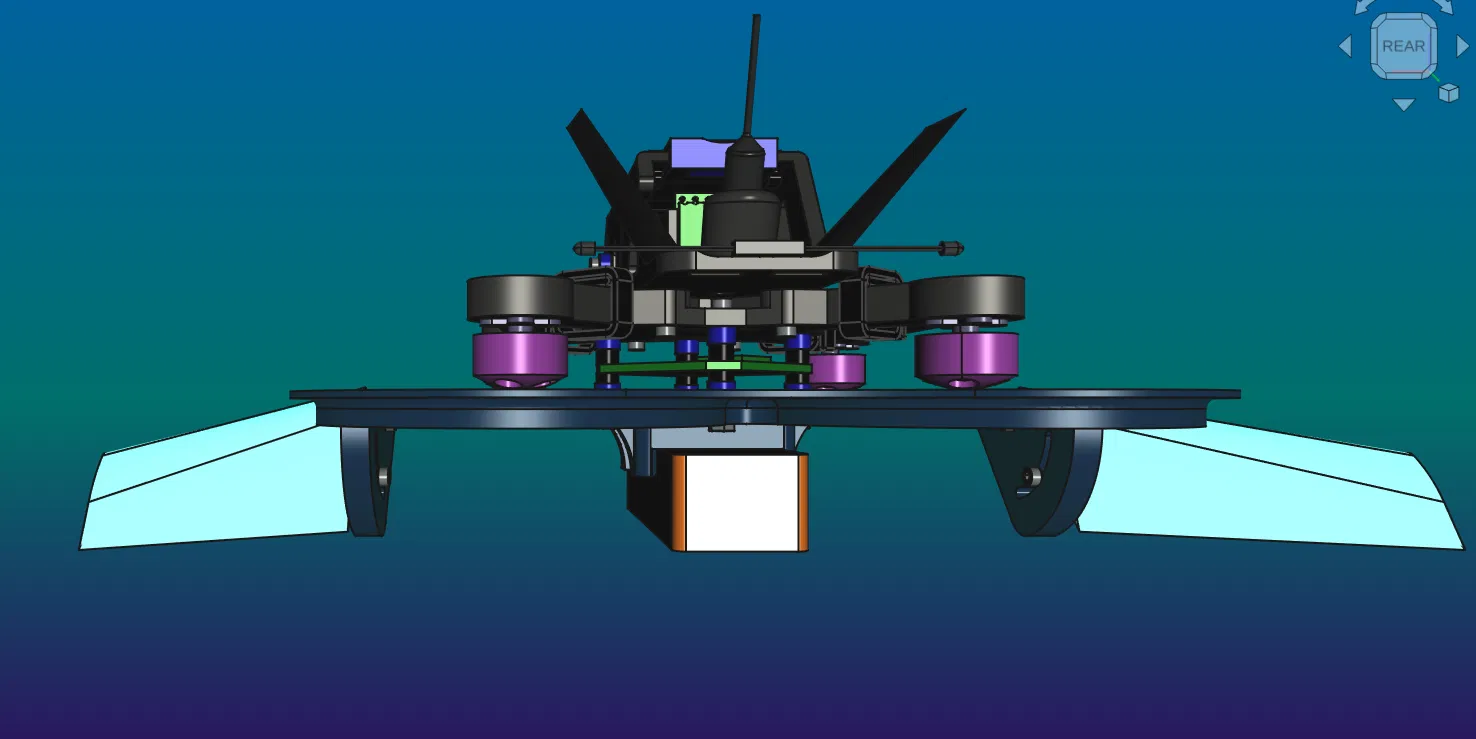
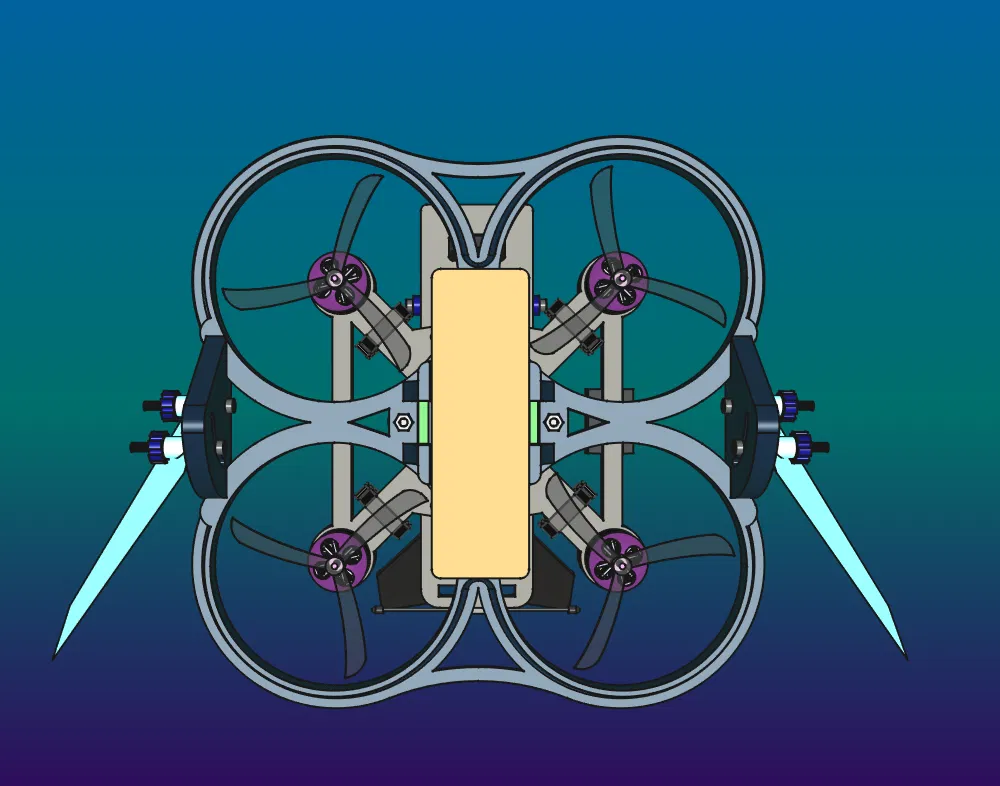
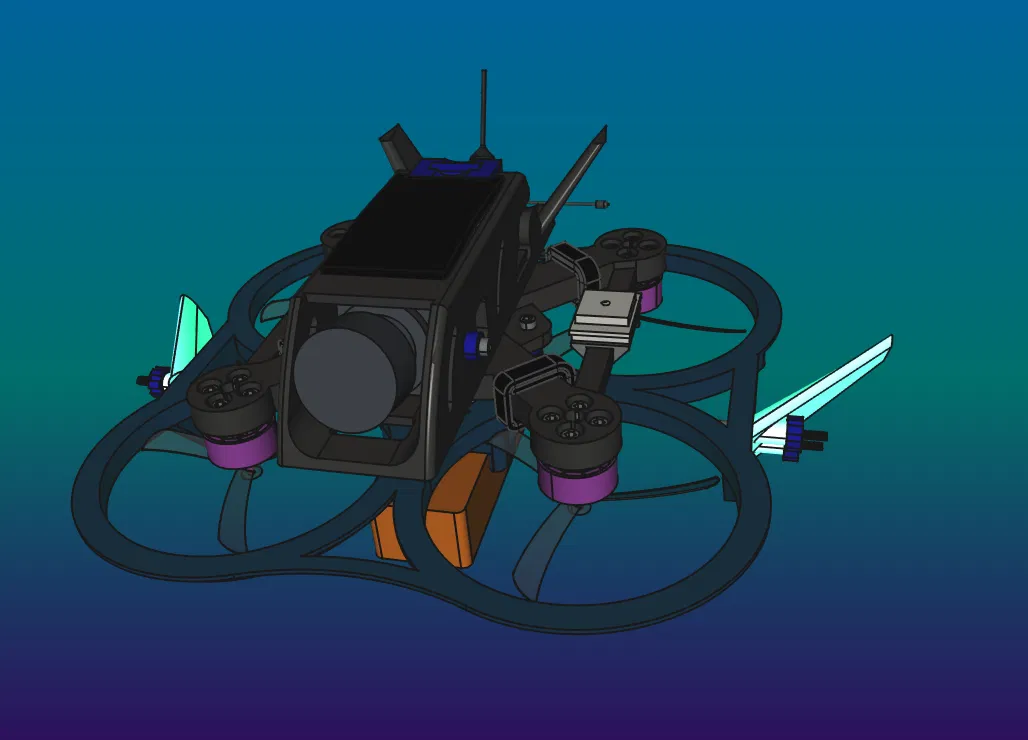
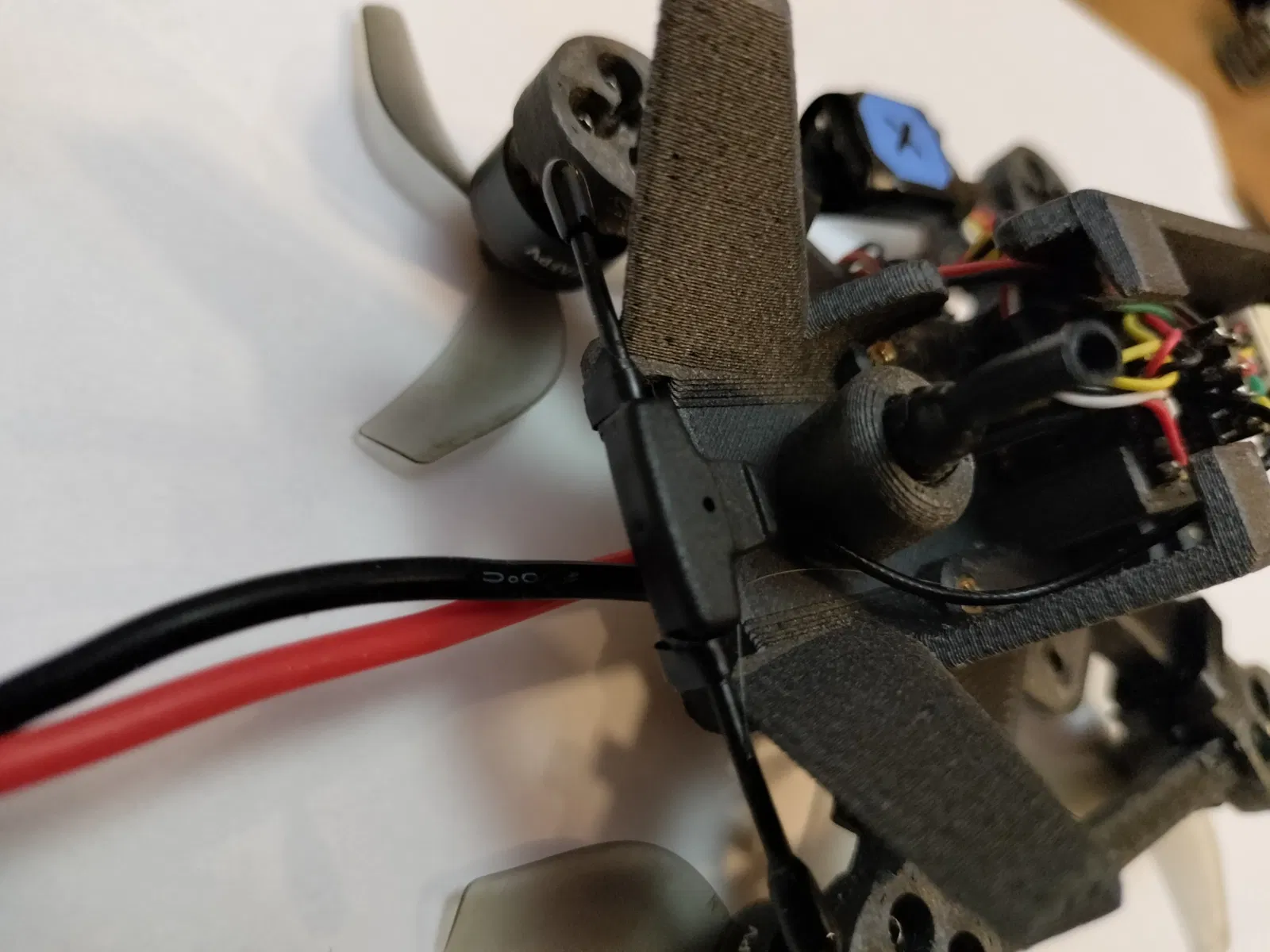
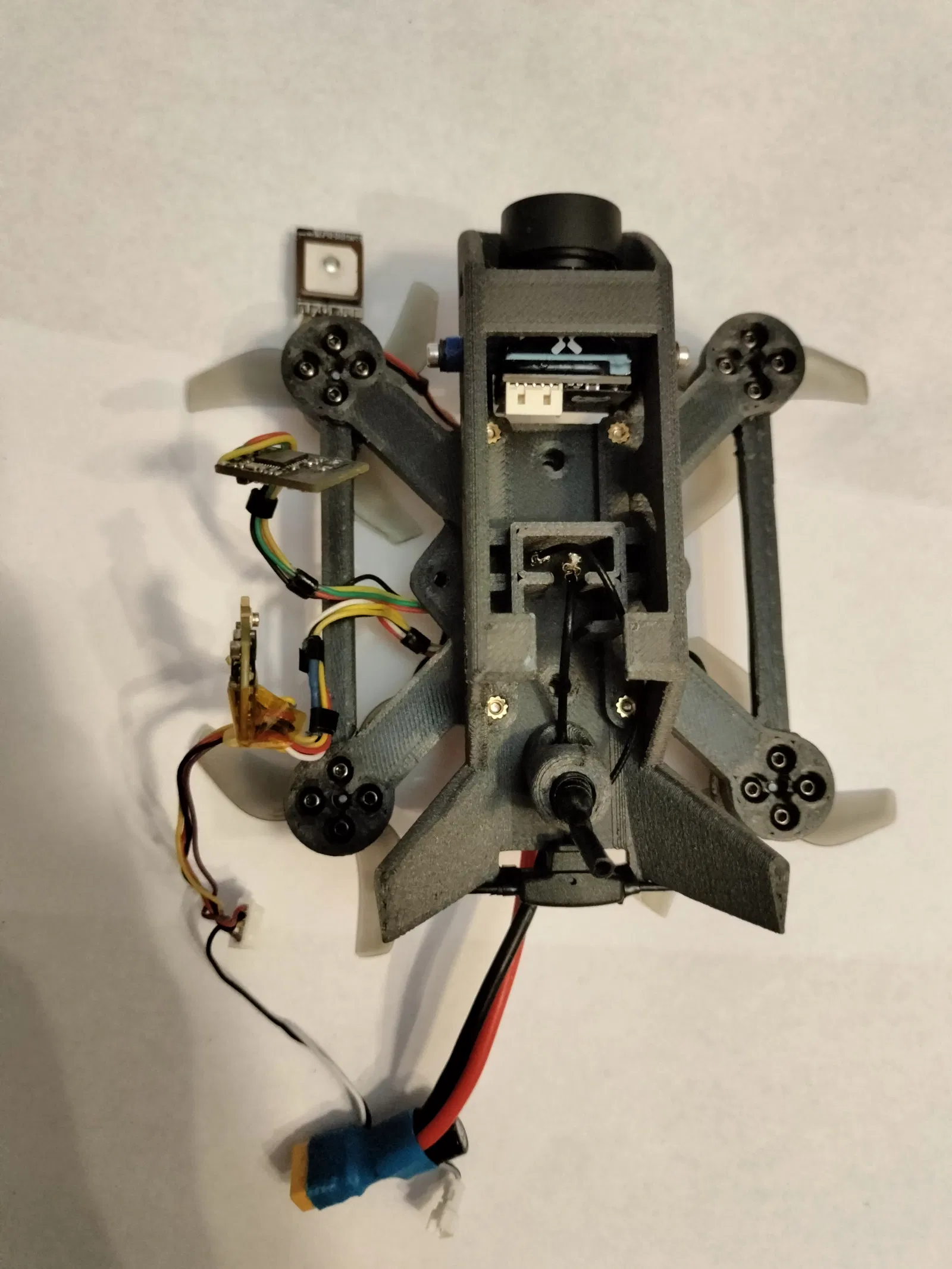
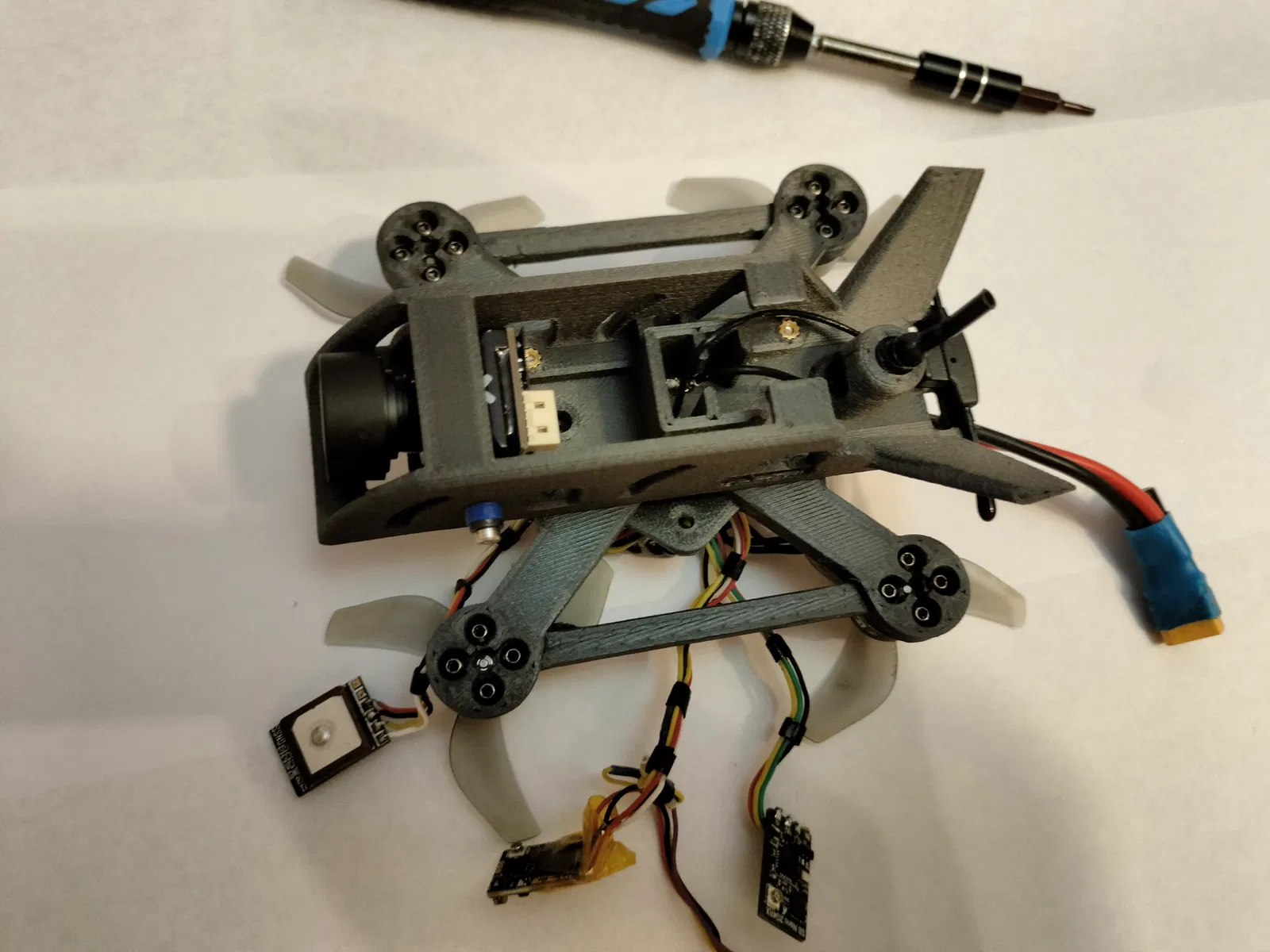
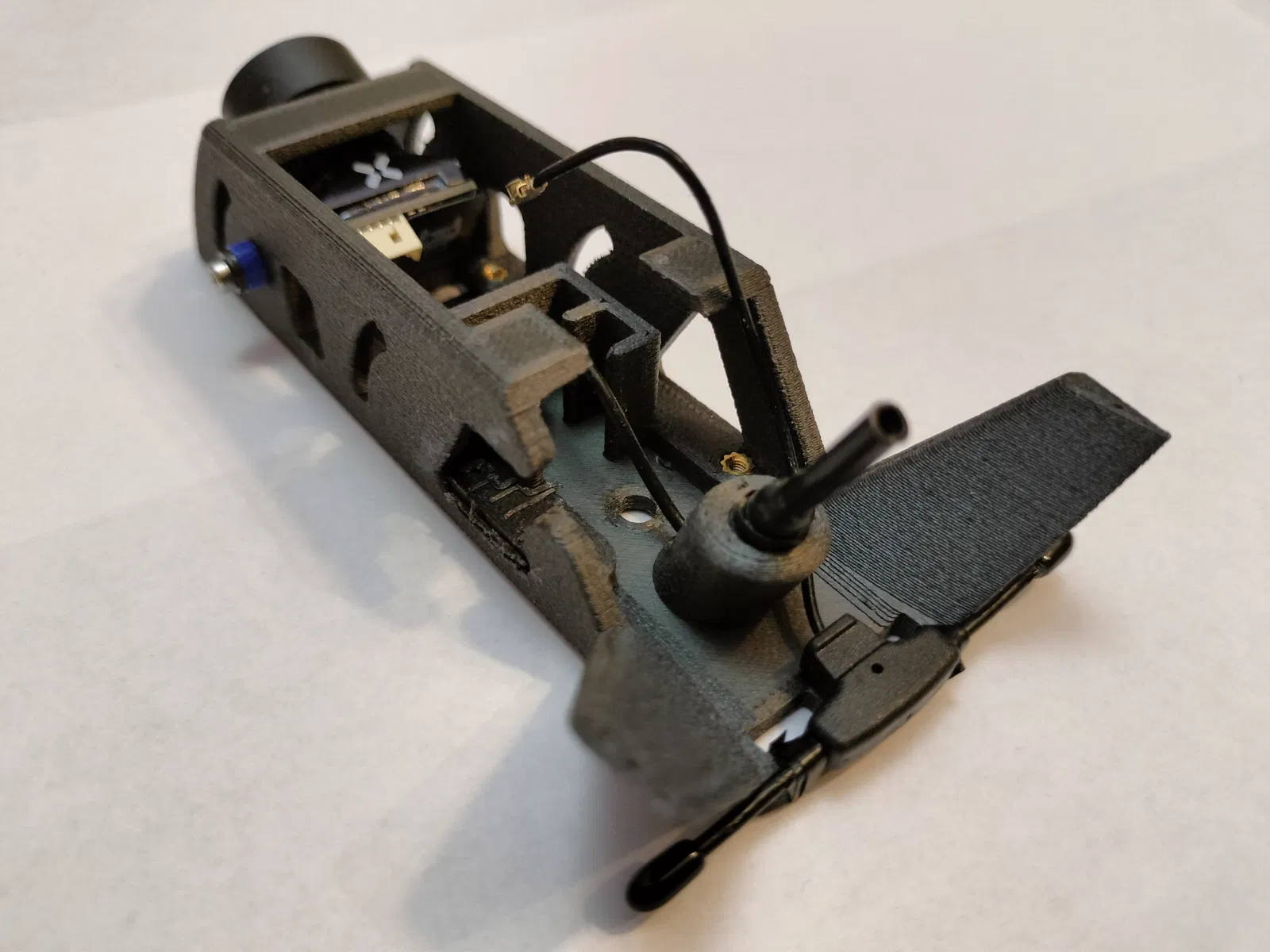
Chimera là drone freestyle cinewhoop loại 2,2", dành cho pin 3S, với cấu trúc in 3D hoàn chỉnh
- Khối lượng sẵn sàng để bay (với đèn, pin và cánh) : <200 gram
- Tải trọng : Có thể bay với camera hành trình nhẹ
- Thời gian bay : 1,5 - 5 phút
*Tốc độ có thể giảm trong hệ thống edgeTX bằng cách sử dụng công tắc logic dựa trên tốc độ đọc từ GNSS và chức năng mix. Dự án bao gồm cấu hình giới hạn tốc độ khi SB BẬT
Video Youtube:
In 3D
Tất cả trên đầu phun đồng 0.4, đảm bảo bạn có ít nhất 5 chiếc - Sợi CF sẽ mòn nhanh chóng. Cắt Z-offset sau mỗi lần in CF
Tôi không khuyên dùng đầu phun SS vì nó quá lạnh đối với máy in của tôi.
Mẹo/Thông tin
Vui lòng sử dụng vật liệu phù hợp. Các bộ phận của drone sẽ nóng hoặc rất nóng. In các bộ phận bằng PLA hoặc tương tự sẽ làm chảy cấu trúc của bạn trong khi bay. Nếu máy in Sidewinder X4 giá rẻ của tôi có thể xử lý các vật liệu này - máy in của bạn cũng vậy.
Đây không phải là dự án rẻ tiền - đừng làm nó vì thiếu kinh phí. Mua khung sẵn sẽ rẻ hơn mua sợi CF
Một pin cho một lần bay 2-3 phút. Đảm bảo bạn có nhiều hơn 1 viên
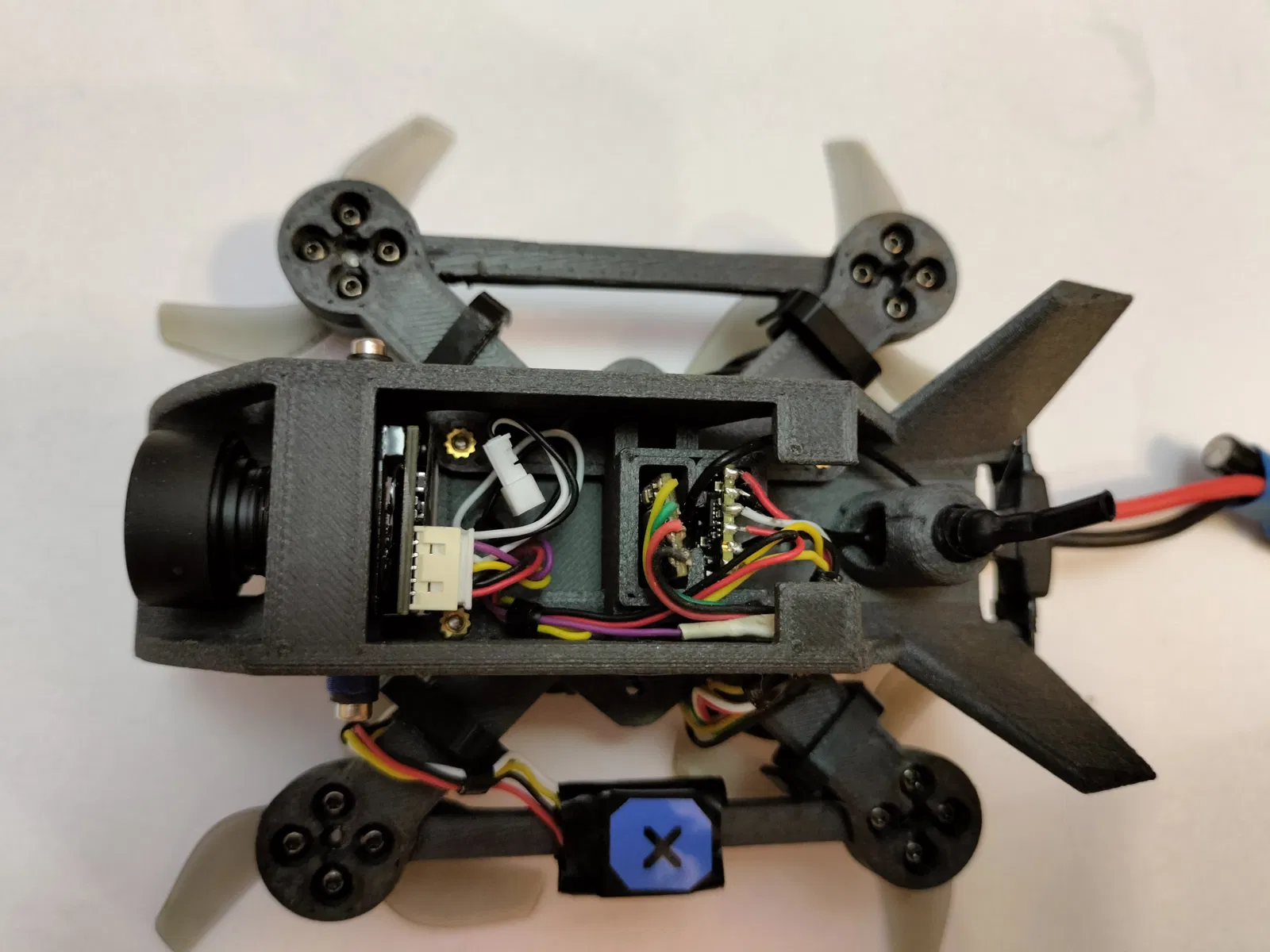
Các bộ phận
- duct-R : PA12, 3 vòng tường, hỗ trợ dạng cây (thêm ngoại lệ cho kênh dây đeo), độền 10-30% dạng tổ ong, xoay 180 độ theo trục X (lộn ngược). sau khi in, làm nóng và uốn các đường viền cánh xuống 90 độ
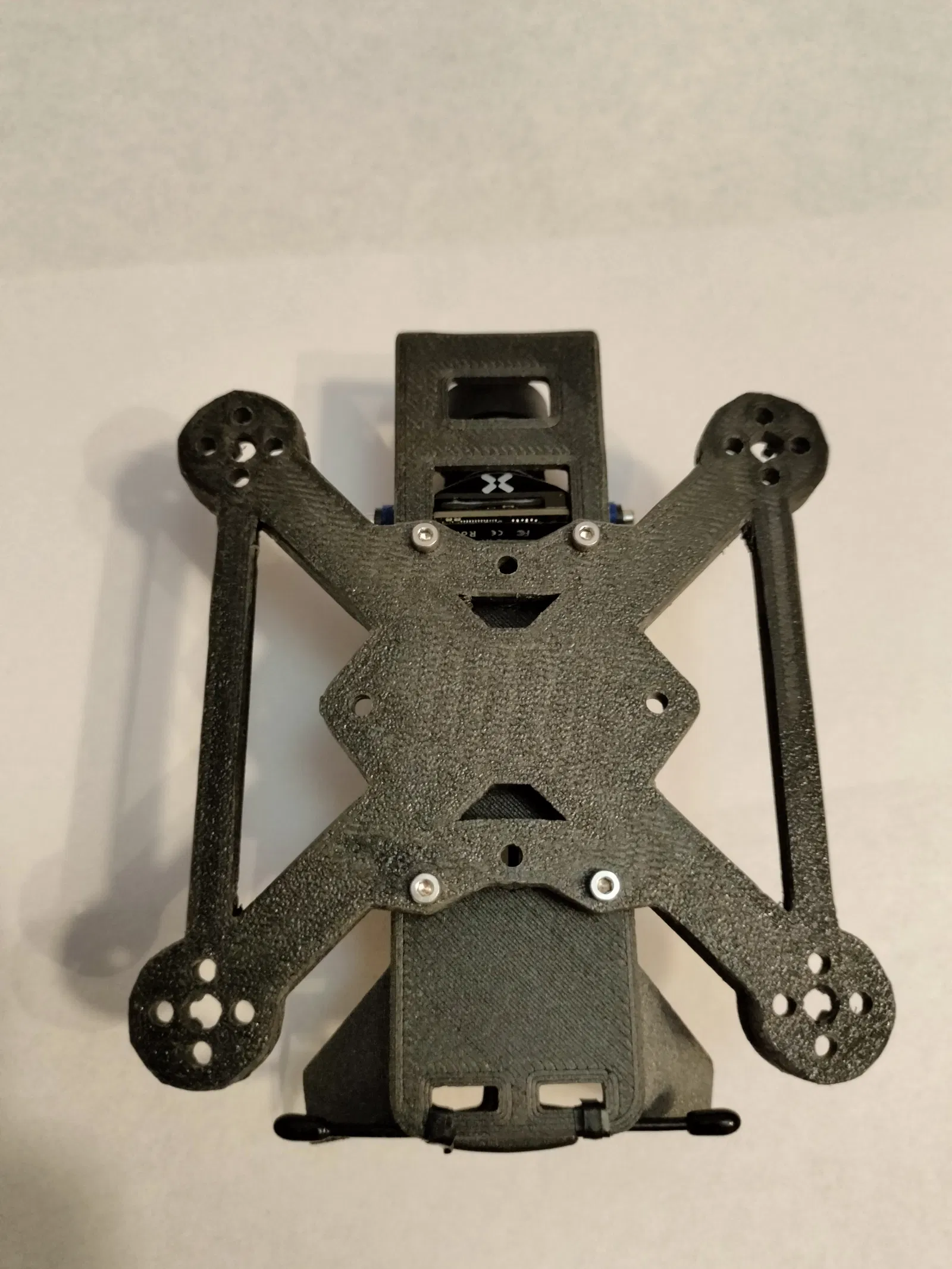
- frame : PC-CF, 2 vòng tường, không hỗ trợ, độền 100% dạng lưới, xoay 35 độ theo trục Z
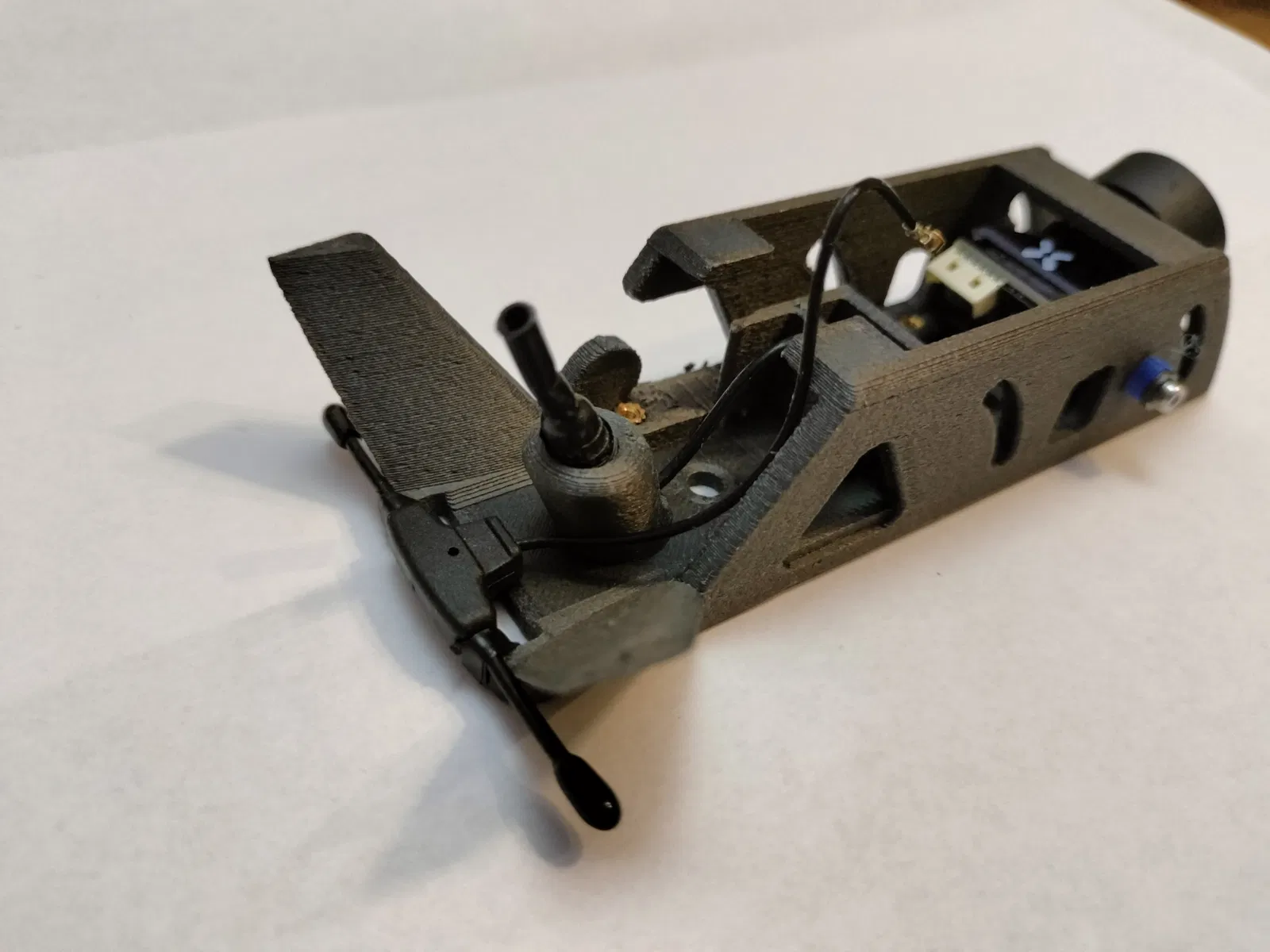
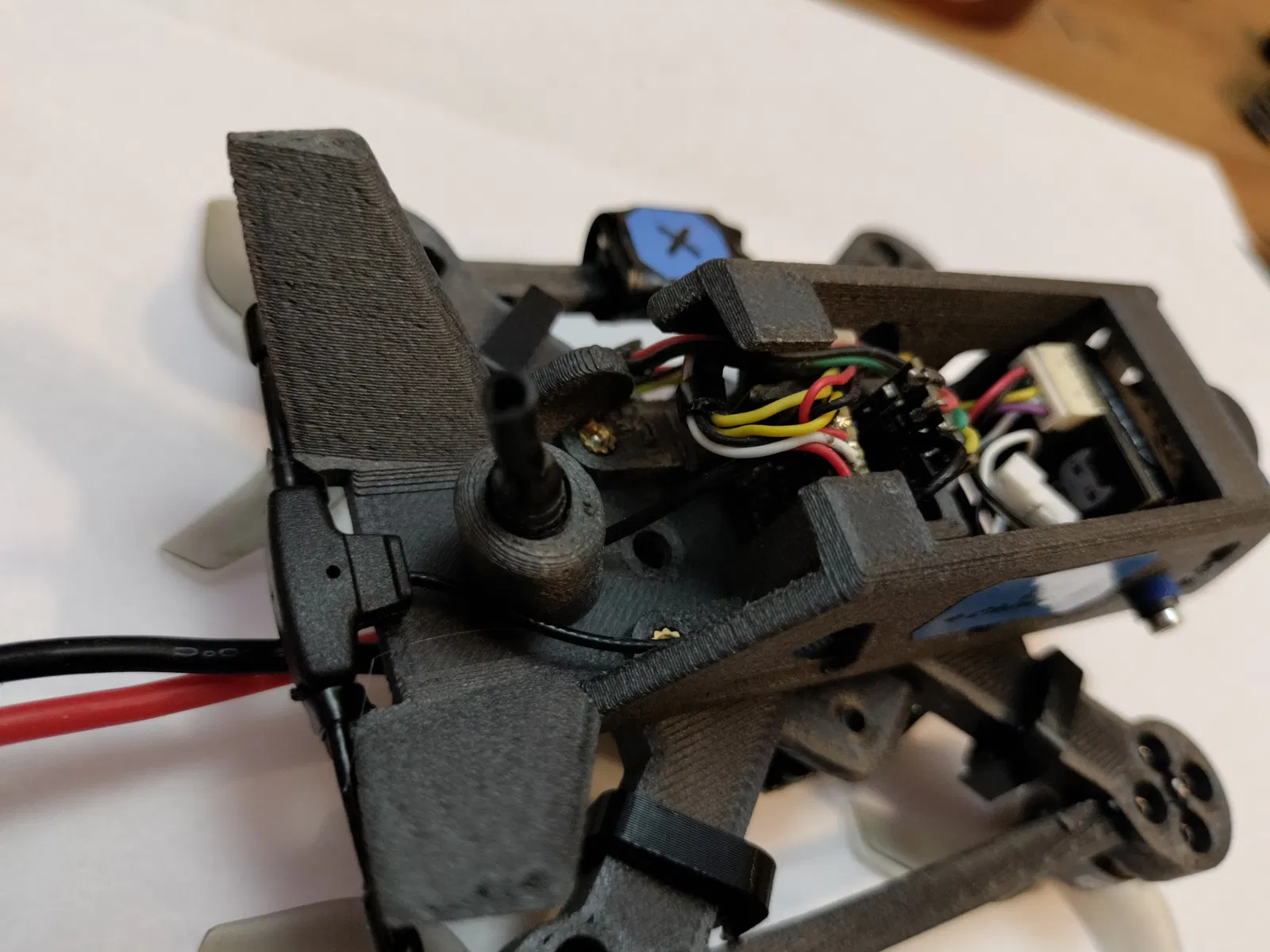
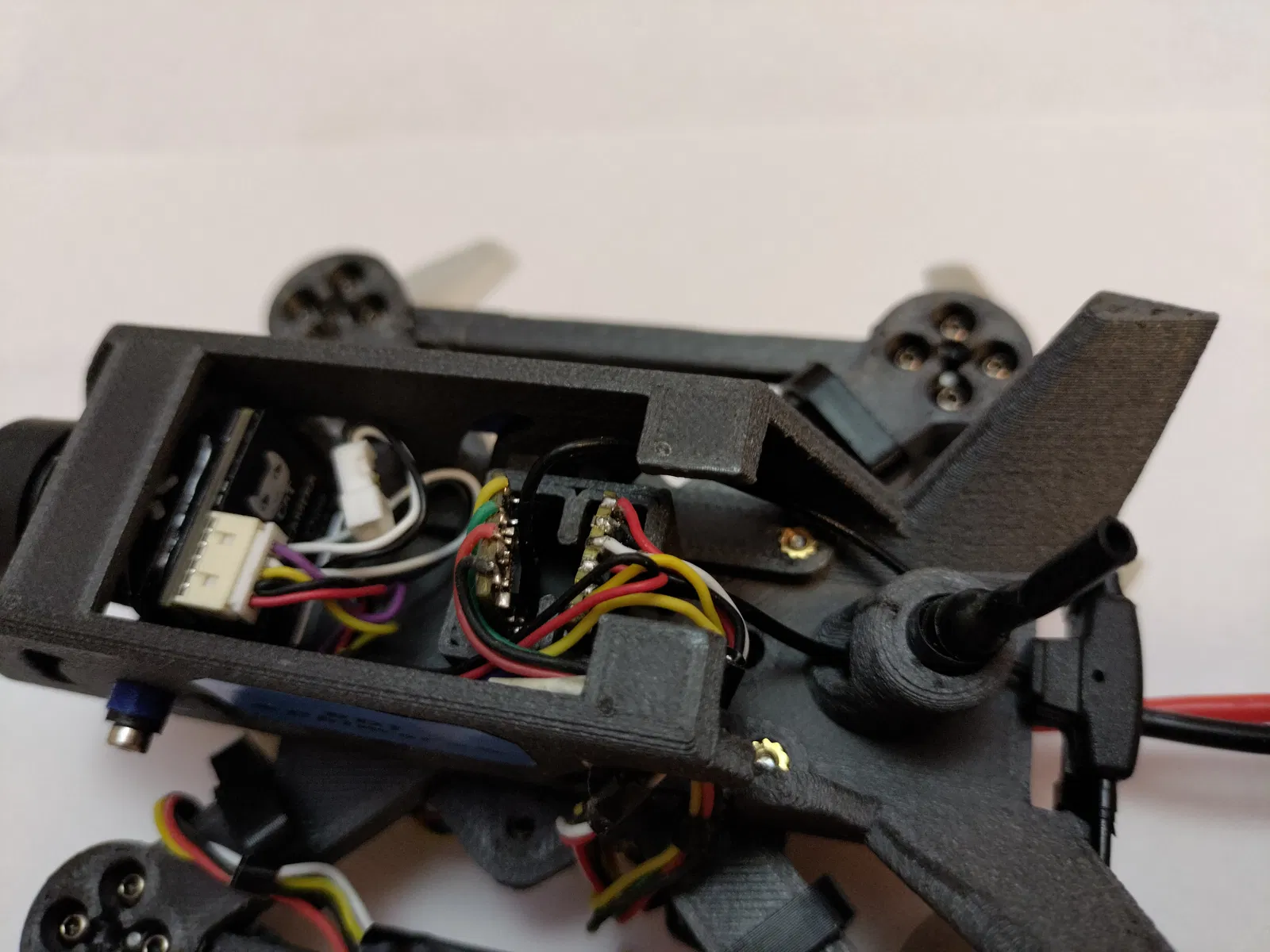
- body : PETG-CF, 3 vòng tường, hỗ trợ dạng cây mạnh, độền 100% dạng lưới
loại bỏ các bộ phận hỗ trợ dưới túi thông gió bên, lỗ trục camera, túi thông gió đuôi phải, lỗ dây ăng-ten VTX
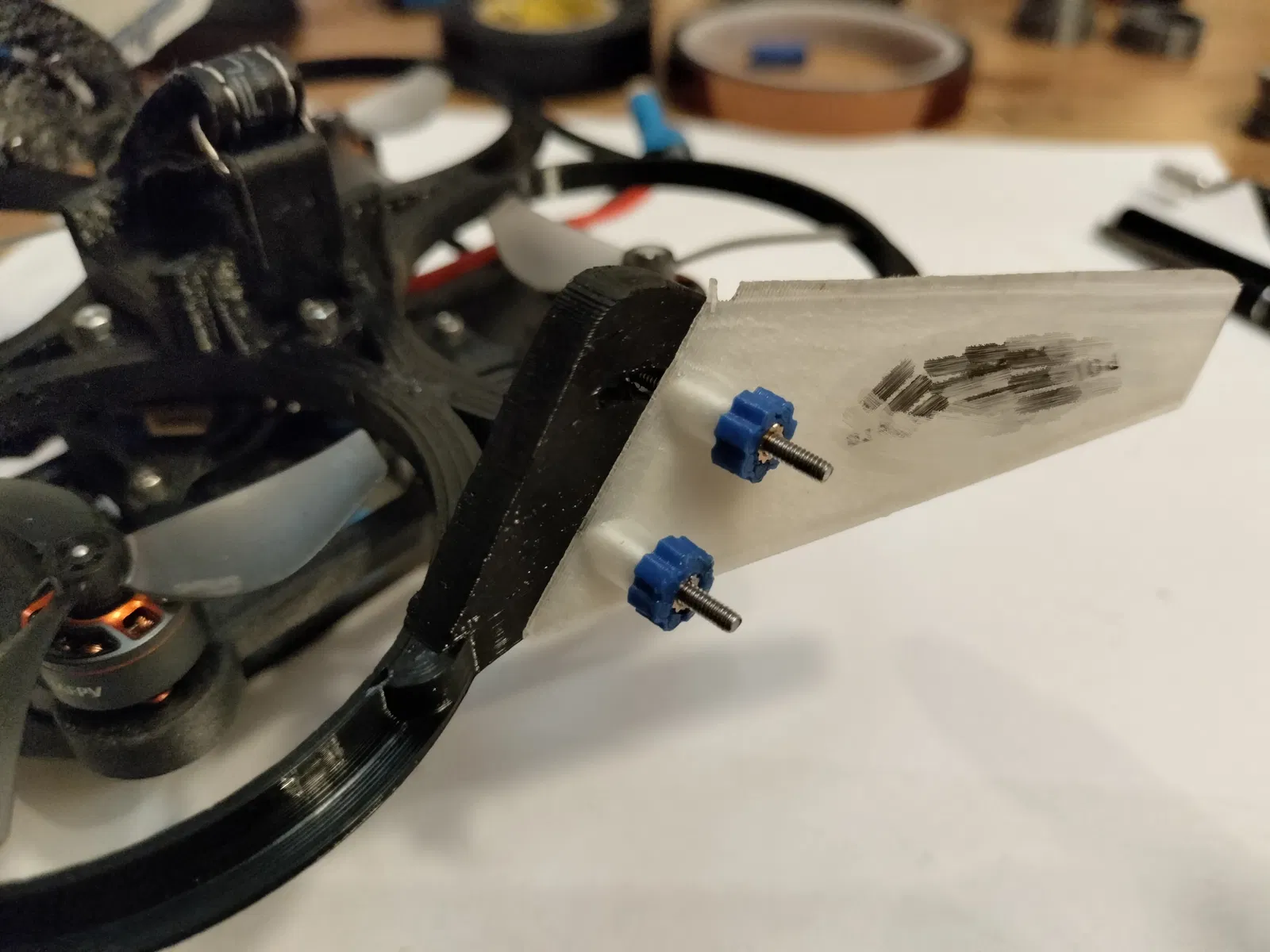
- wings : PLA GLOW, 3 vòng tường, 80%, không hỗ trợ, xoay 90 độ theo trục Y, để đảm bảo đế song song với bàn
- cable mounts : TPU A95, 100%, 3 vòng tường, X90 độ, Y-45 độ
- roof/mount roof : TPU A95, 100%, 3 vòng tường, Y90 độ, hỗ trợ dạng cây
đặt khoảng cách giao diện hỗ trợ trên cùng là 0.2mm để có vẻ ngoài đẹp
- GNSS mount : TPU A95, 3 vòng tường, X90 độ
- Grip nuts, sleeves : PETG, 100%
- cable lock : PETG, 100%, X90 độ
BOM
In 3D
- 1 x duct-R
- 1 x body
- 1 x FDM frame
- 1 x cánh trái
- 1 x cánh phải
- 4 x đế gắn dây cáp
- 1 x mái hoặc đế gắn mái
- 1 x đế gắn GNSS
- 1 x khóa dây cáp
- 4 x ống lót camera
- 4 x ống lót FC 2mm
- 4 x ống lót FC 3mm
- 4 x đai ốc kẹp
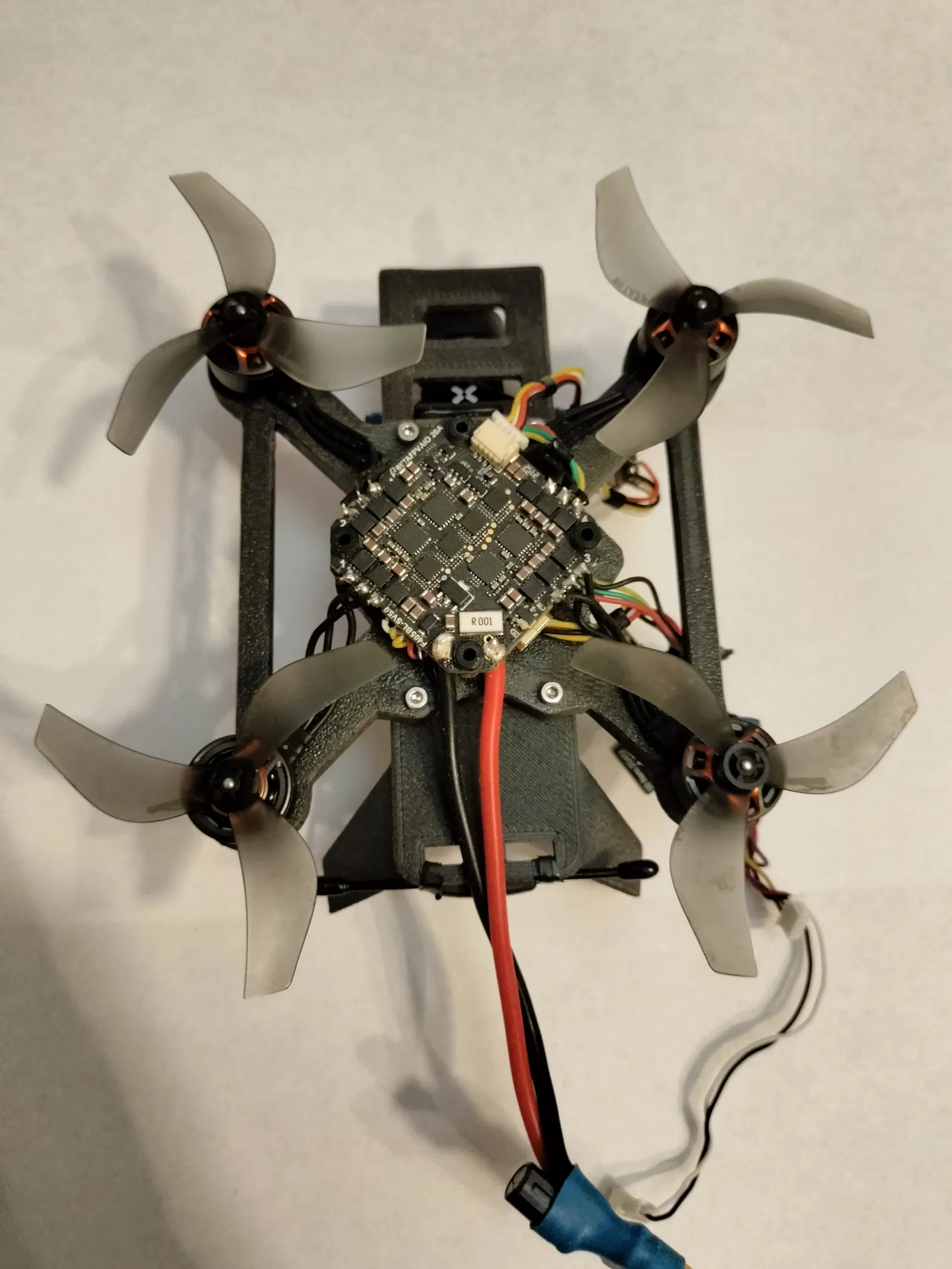
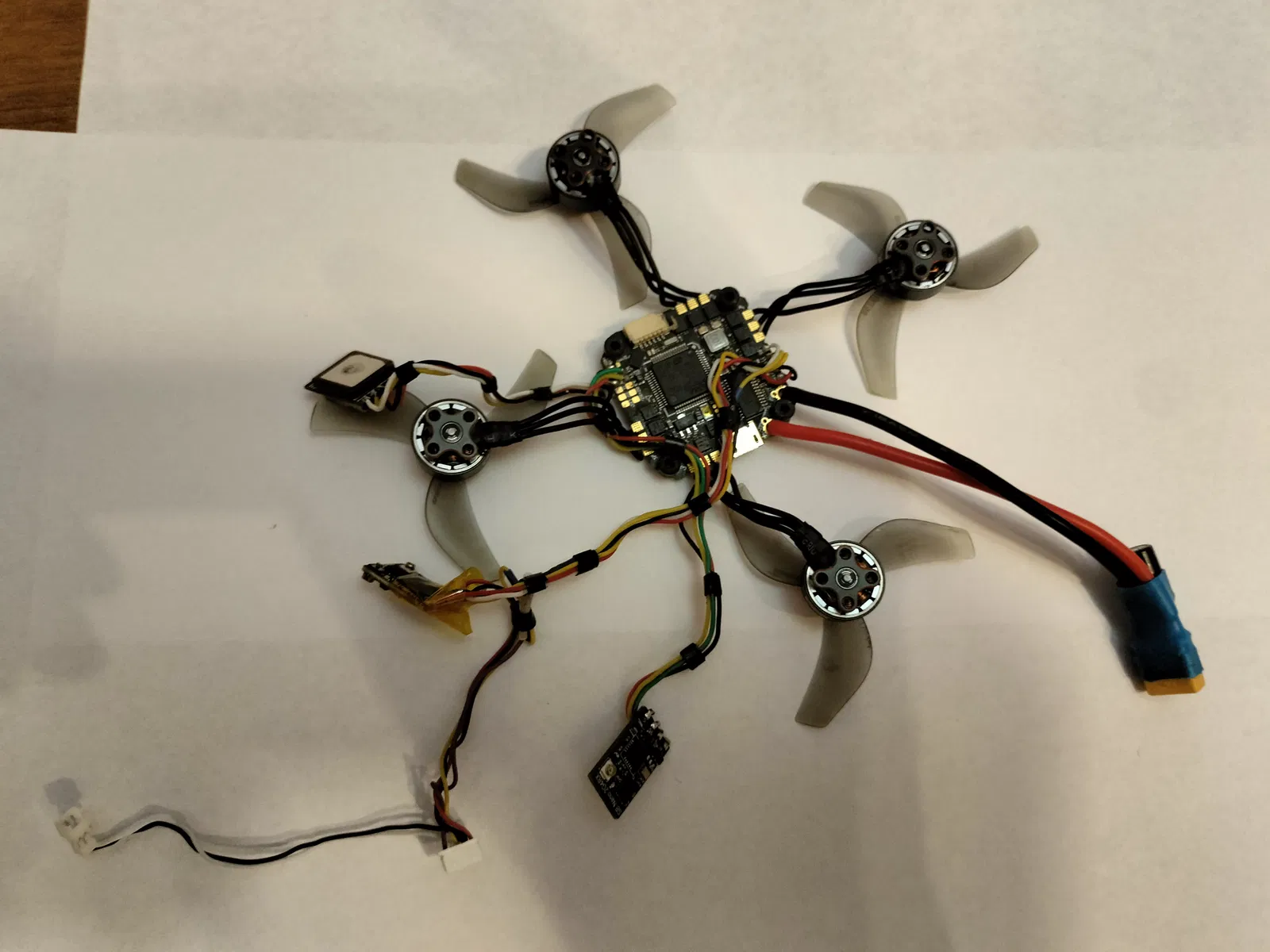
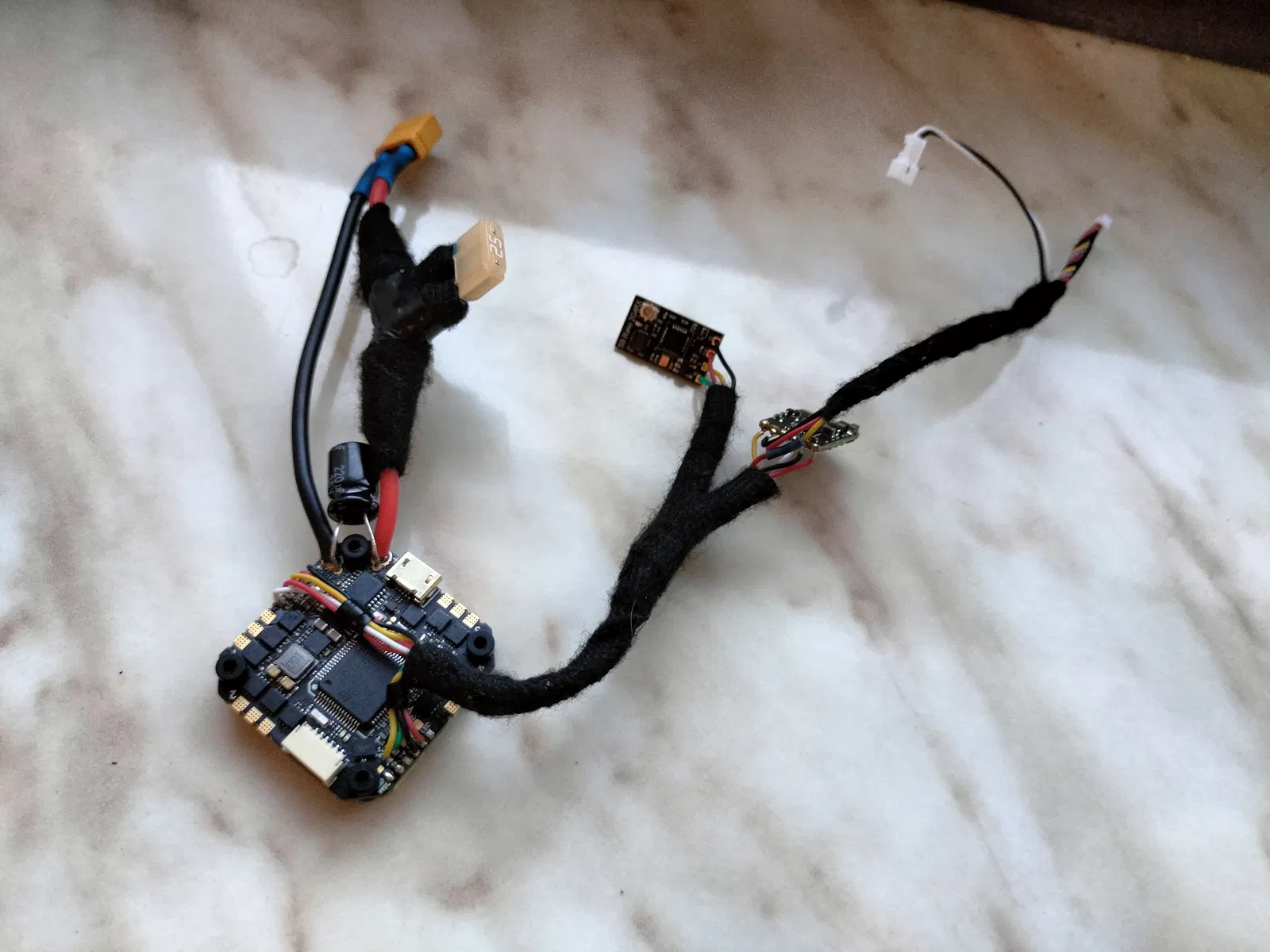
Điện tử
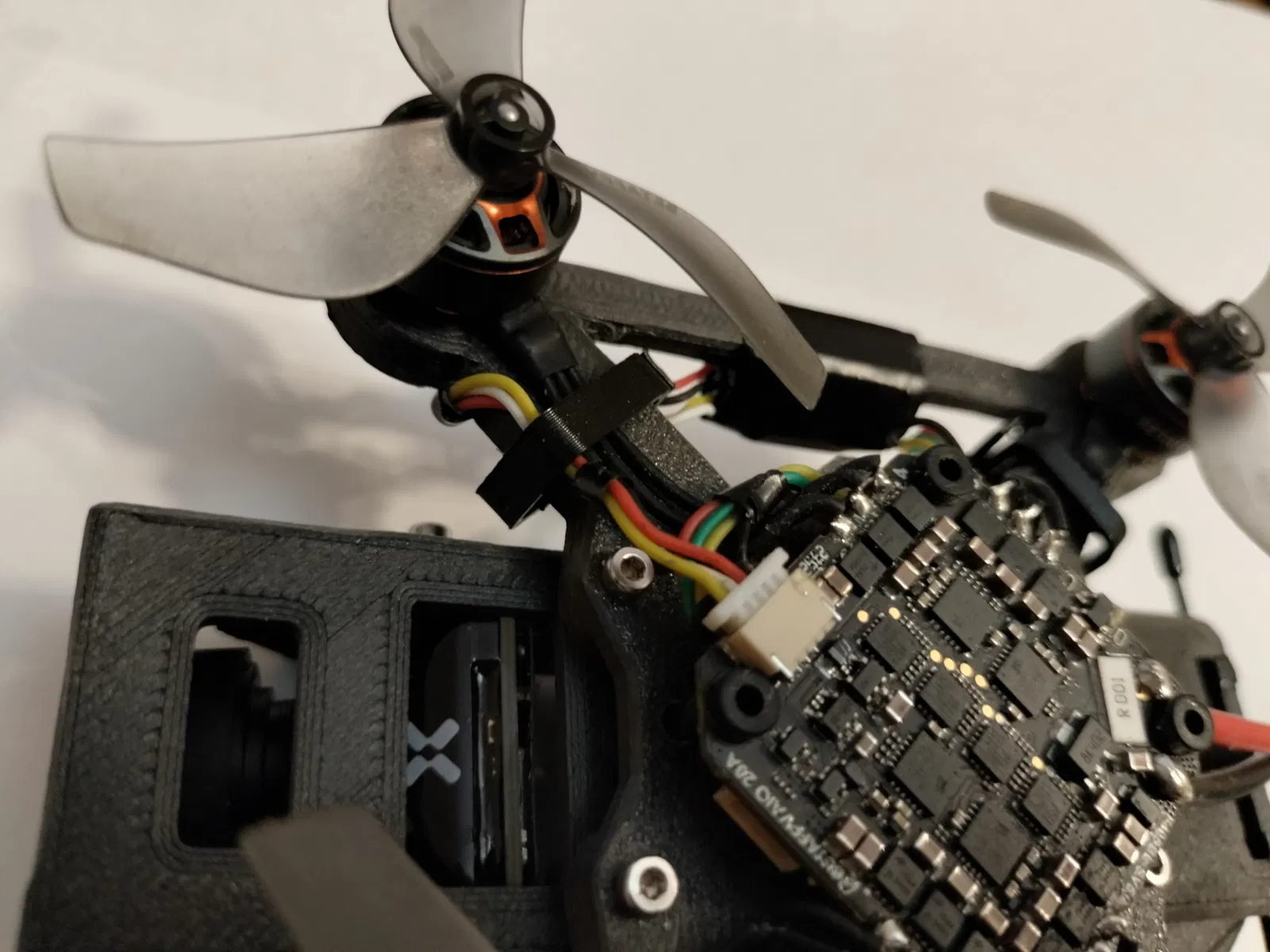
- [ ] FC : GEPRC TAKER G4 35A AIO
bạn có thể sử dụng bất kỳ loại nào khác có dòng 20A+, tương thích với 3S và khoảng cách 25,5mm
- [ ] cánh quạt : Cánh quạt GEMFAN 2218 3 cánh (trục 1.5mm)
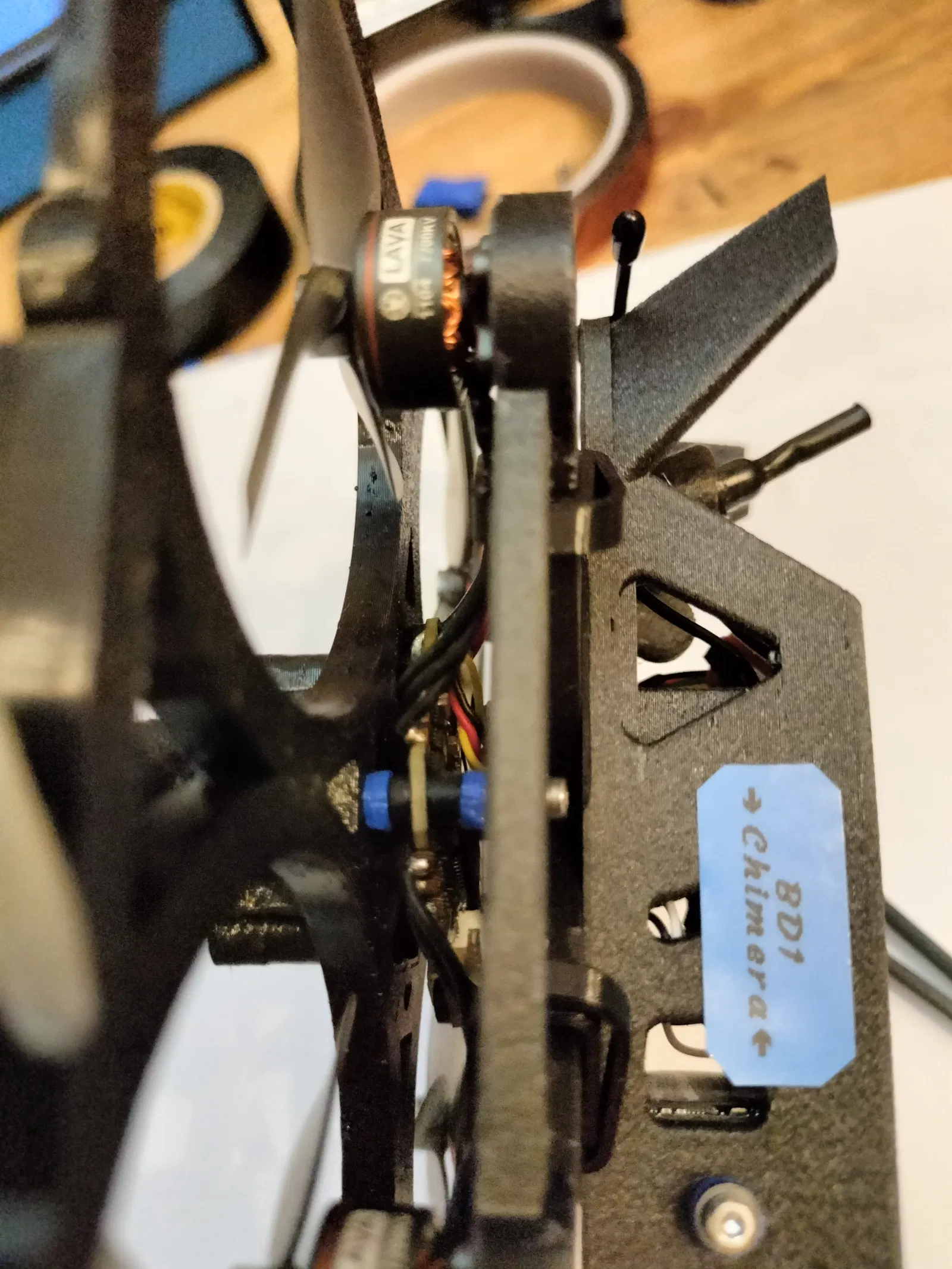
- [ ] động cơ : Động cơ không chổi than BETAFPV Lava series 1104 | 7200KV
- [ ] bộ thu : Bộ thu SpeedyBee Nano 2.4G ExpressLRS ELRS
hoặc bất kỳ bộ thu ELRS nào khác có thể lắp vừa vào các khe gắn trong thân máy
- [ ] camera : Foxeer Cat 3 Micro(19x19mm) hoặc camera analog khác
- [ ] VTX : Foxeer Reaper Nano V2 VTx 5.8G 72CH 350mW Tramp
- [ ] Ăng-ten video : Ăng-ten Speedy Bee 5.8 GHz V2 UFL
- [ ] pin : LAVA 3S 550mAh 75C
- [ ] GNSS : La bàn Foxeer M10Q-180
- [ ] Bộ điều khiển : Jumper Bumblebee, hoặc bất kỳ bộ điều khiển nào có ELRS và edgeTX
- [ ] Kính : Kính BETAFPV VR03 hoặc bất kỳ kính analog nào khác
- [ ] Ăng-ten VRX : Bất kỳ ăng-ten RHCP nào
- [ ] Sạc : iMax B6 V2 với bộ nguồn 12V / ToolkitRC Q4AC
- [ ] Cầu chì ô tô 5A và ổ cắm cáp : cầu chì sạc
- [ ] một số đèn drone : nếu bạn muốn bay đêm
- [ ] 2 x bộ đầu nối XT30 bổ sung : để kết nối pin với bộ sạc và FC
- [ ] cáp dây silicon đỏ và đen 18AWG : để kết nối với FC
- [ ] cầu chì ô tô 25-30A và ổ cắm cáp : không bắt buộc, nhưng được khuyến nghị
Cơ khí
- [ ] Dây đeo pin velcro 10x130mm
- [ ] 8 x vít M2 20mm có đầu trụ để gắn stack và cánh
đảm bảo bạn có đồ dự phòng - các vít này có thể bị cong sau va chạm mạnh :joy:
- [ ] 4 x vít M2 10mm có đầu trụ để gắn thân máy
- [ ] 12 x đai ốc đồng M2 H3 D3.6mm
bạn có thể khôi phục chúng từ các bộ phận bị hỏng, nhưng hãy đảm bảo bạn có đồ dự phòng
- [ ] 4 x đai ốc M2 1.6mm để khóa vít stack
Bản vẽ kỹ thuật
Danh sách việc cần làm
- [ ] làm hộp đựng
- [x] tạo tệp lắp ráp
- [x] sửa lỗi lắp ráp
lỗi freeCAD - đã khắc phục bằng giải pháp tạm thời
- [x] quay cảnh bay đêm
- [x] quay cảnh bay toàn lực
- [ ] làm hướng dẫn lắp ráp
- [x] thay đổi khoảng cách FC thành 25.5x25.5mm
- [x] thêm cầu chì vào BOM
- [ ] bao gồm firmware Rx
- [ ] bao gồm firmware Tx
- [x] bao gồm firmware beta fpv F405
- [x] bao gồm firmware geprc taker
- [x] sửa độ trễ nhật ký tốc độ GPS trên bộ điều khiển (script ELRS trong bộ điều khiển - tỷ lệ viễn trắc)
- [x] sửa độ ổn định khi quay nhanh
- [x] tìm giá trị ga để tự động hạ cánh
- [x] đặt báo thức độ cao và tốc độ
Tệp nguồn
https://github.com/bartoszp1992/chimeraDrone
BD1 là viết tắt của "Thiết kế của Bart số 1"
Giấy phép
File mô hình























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!