Quadruped II - v1.0: Robot bốn chân thế hệ thứ hai

Quadruped II - v1.0 là phiên bản nâng cấp của robot bốn chân, với 12 servo, vòng bi và khả năng tùy biến cao hơn nhờ ROS 1 Noetic. Hướng dẫn chi tiết về vật liệu, công cụ và cách in.









Mô tả
Đây là phiên bản cũ của robot bốn chân. Đây là mô tả dự án gốc:
Giới thiệu
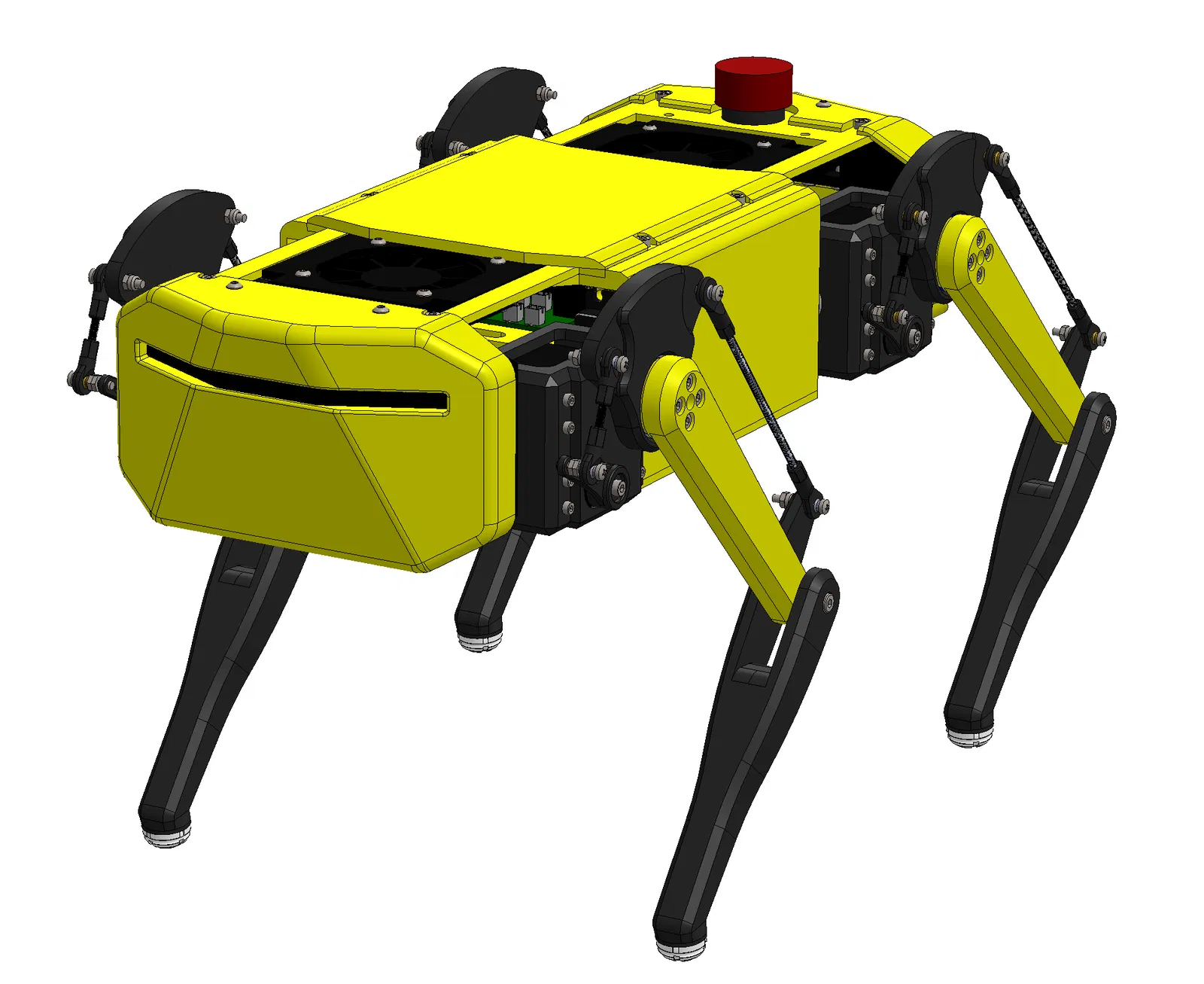
Quadruped, một robot được thiết kế để có chi phí thấp nhưng có khả năng thực hiện nghiên cứu và được sửa đổi rộng rãi với các bộ truyền động và cảm biến bổ sung. Mã này dựa trên các cơ sở mã Stanford Pupper và notspot, với những sửa đổi sâu rộng, bao gồm cả việc tích hợp vào ROS 1 Noetic
Sự khác biệt giữa các phiên bản là gì?
Quadruped I có ít bộ phận hơn. Nó có 10 servo mà chỉ có phần hông phía trước mới có thể xoay, làm cho chuyển động của nó bị hạn chế hơn so với người anh em Quadruped II.
Nó có ít thành phần hơn và điện tử đơn giản hơn. Tất cả các bộ phận và khớp nối đều được in 3D.
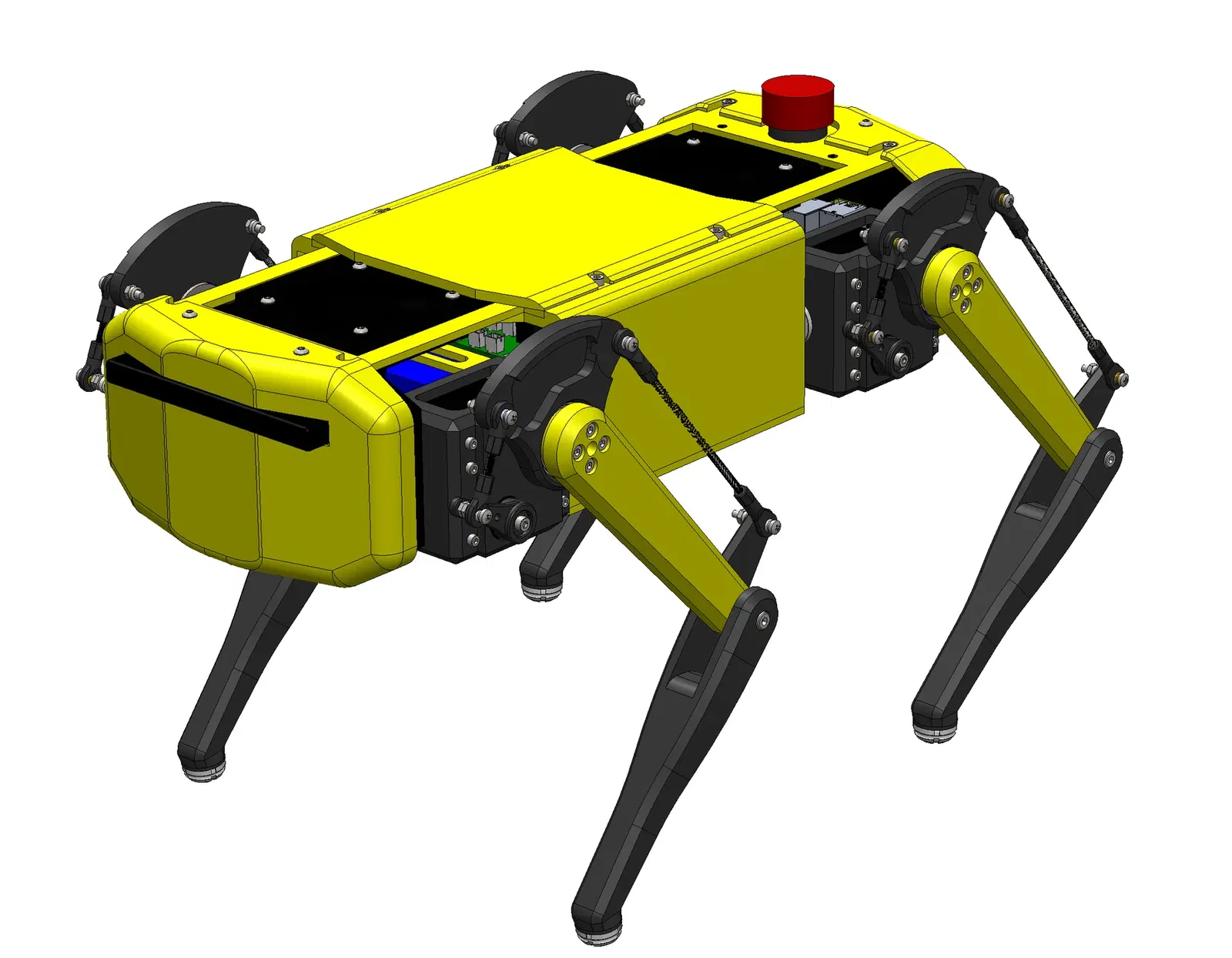
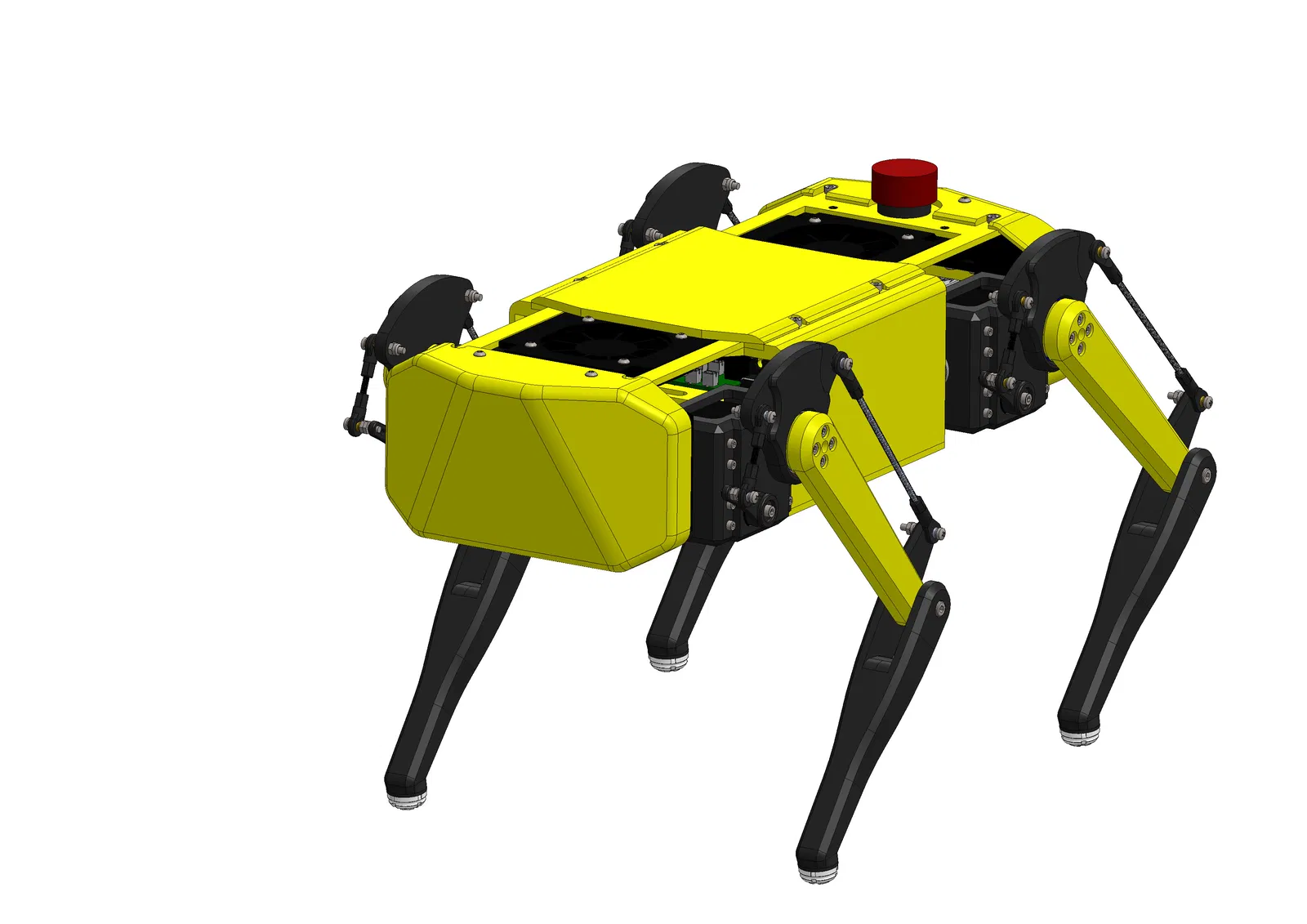
Quadruped II có vòng bi và 12 servo. Nó cũng có một bảng phân phối nguồn tùy chỉnh để việc lắp ráp dễ dàng hơn. Nó cũng có triển khai ROS 1 Noetic, cho phép một cấp độ linh hoạt khác.
Quadruped I là một dự án DIY khởi đầu tuyệt vời. Quadruped II thì tiên tiến hơn nhưng cũng đắt hơn.
Công cụ
Các công cụ cần thiết hoặc nên có cho dự án này.
Mỏ hàn TS101
(Đề xuất)
Bộ đầu mài dao chèn nhiệt - Dành cho TS101
(Đề xuất)
Tua vít điện chính xác
(Đề xuất)
Bộ lục giác
Bộ tua vít Torx
Tua vít lực xoắn
Kìm tuốt dây
Kìm cắt dây
Dụng cụ ép chèn nhiệt
Dụng cụ bấm cos
Mỏ hàn - Loại thông thường (Tùy chọn)
Liên kết Amazon Lựa chọn tiết kiệm chi phí
Bộ đầu mài dao chèn nhiệt (Tùy chọn)
Liên kết Amazon Lựa chọn tiết kiệm chi phí
Bộ tua vít chính xác
Liên kết Amazon Lựa chọn tiết kiệm chi phí
Vật tư tiêu hao
Bộ chèn nhiệt
Dây điện - Nguồn
Dây điện - Truyền thông / Tín hiệu
Bộ vít đầu nút M3
Bộ vít Torx M3
Bộ vít đầu côn M3
Bộ đầu cốt
Dây rút Velcro tái sử dụng
Nhựa in - PC / ASA / ABS / PETG
Nhựa in - Các loại nhựa kỹ thuật
Liên kết Amazon Sợi Carbon & Nhiệt độ cao Nhựa in - PLA
Nhựa in - TPU
Hướng dẫn in
Dưới đây là các hướng dẫn in để bạn có thể thành công với việc in các bộ phận:
Loại lưới
Gyroid, Honeycomb, Triangle hoặc Cubic
Vật liệu cấu trúc
PCCF, PACF, ASA, ABS, PCTG, PETG, (TPU cho chân)
Vật liệu thẩm mỹ
PLA hoặc bất cứ thứ gì bạn thấy đẹp.
Tỷ lệ lưới
35% Cấu trúc | 15% Thẩm mỹ
Độ dày lớp
0.2mm, đề xuất
Số lớp tường
Đề xuất: 4
Số lớp trên/dưới
Đề xuất: 5
Độ rộng đùn
0.4mm, đề xuất
Ghi chú linh tinh:
- Bộ phận màu đen đóng vai trò truyền chuyển động từ servo dưới lên chân dưới phải được in thành hai phần, sau đó chèn vòng bi, rồi dán lại với nhau. Có các cấu hình trong Solidworks để cho phép xuất ra cái này nhưng tôi sẽ cố gắng thêm tất cả các STL sớm.
- Tất cả các bộ phận tiếp xúc với động cơ BẮT BUỘC phải được in bằng ABS để chống nhiệt.
- Các bộ phận PLA sẽ bị mềm do nhiệt mà động cơ tạo ra (mặc dù điều này có thể tránh được bằng cách sử dụng quạt). Vì vậy, tất cả các bộ phận màu cam cũng như bộ phận trung tâm màu đen giữ các servo cho chân trên và chân dưới đều là ABS (Lưu ý rằng chân trên tiếp xúc với các servo qua các bu lông gắn vào nó, vì vậy lý tưởng nhất cũng nên in bằng ABS để tránh mọi sự cố).
- Các bộ phận phía sau trên và dưới (các bộ phận màu cam lớn) bao quanh các cổng của PI nên được in thành một khối duy nhất. Chúng được thiết kế riêng biệt nhưng bạn sẽ có kết quả tốt hơn nhiều nếu xuất toàn bộ cụm phụ thành STL và in nó.
- Tất cả các chèn nhiệt nên được ép vào bằng đầu mỏ hàn.
Sơ đồ đi dây
Sử dụng dây AWS12 cho truyền thông. Sử dụng AWG22-30 cho bất kỳ cáp nào cấp nguồn cho các thành phần.
Để biết kích thước cáp và cách mua nó - tham khảo tệp danh sách vật liệu. Hầu hết việc đi dây đều yêu cầu hàn và mỏ hàn.
Truyền thông

Nguồn

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!