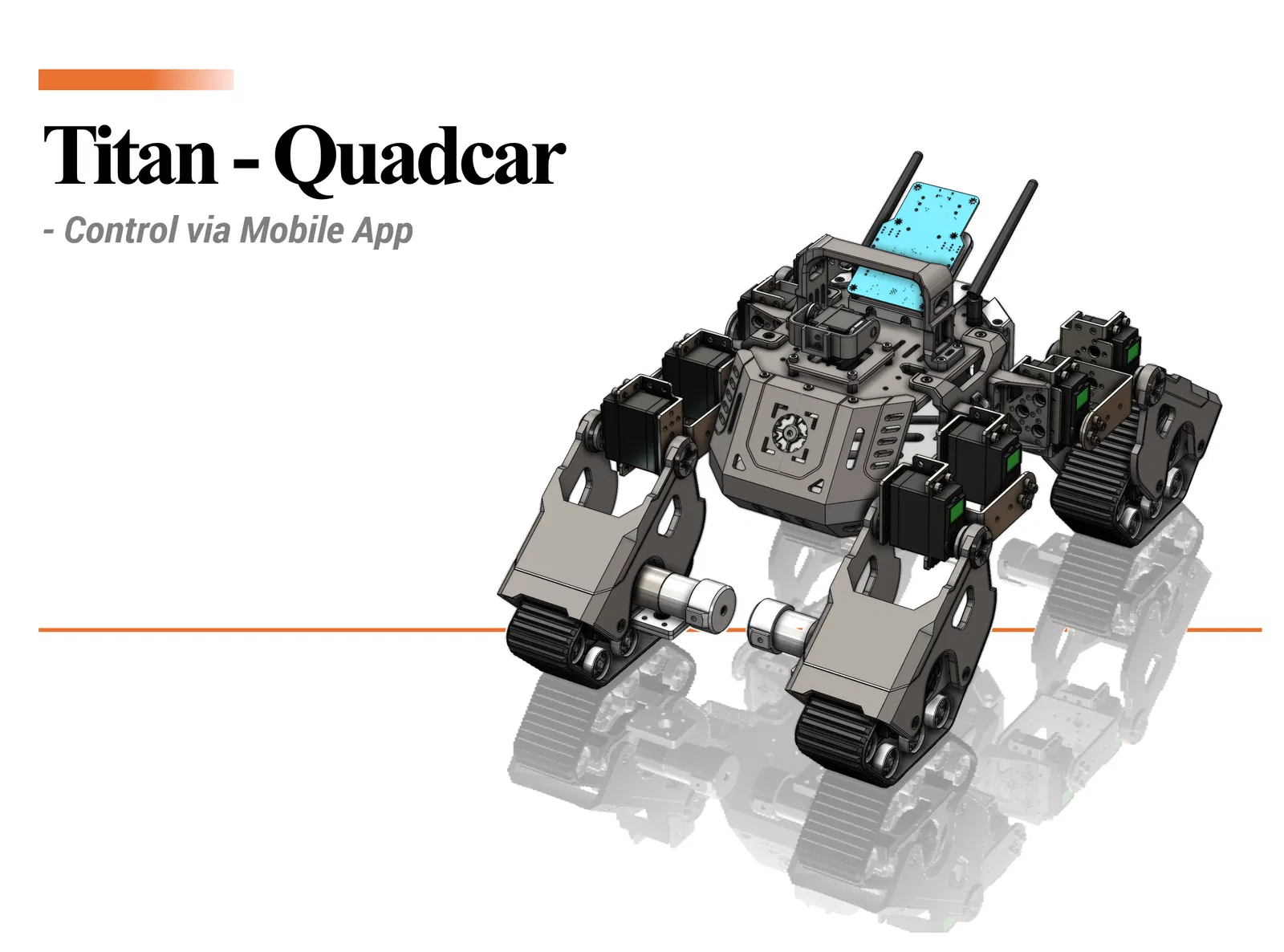
Mô hình Titan: Robot RC điều khiển bốn chân với Bánh xích

Khám phá Titan, robot RC điều khiển bốn chân độc đáo kết hợp khả năng di chuyển bốn chân và bánh xích. Với 8 DOF, điều khiển bằng ESP32 và khả năng thích ứng địa hình vượt trội, Titan là dự án in 3D đầy tham vọng cho người đam mê công nghệ. Bao gồm hướng dẫn in chi tiết và thông tin phần mềm.








Mô tả
Giới thiệu
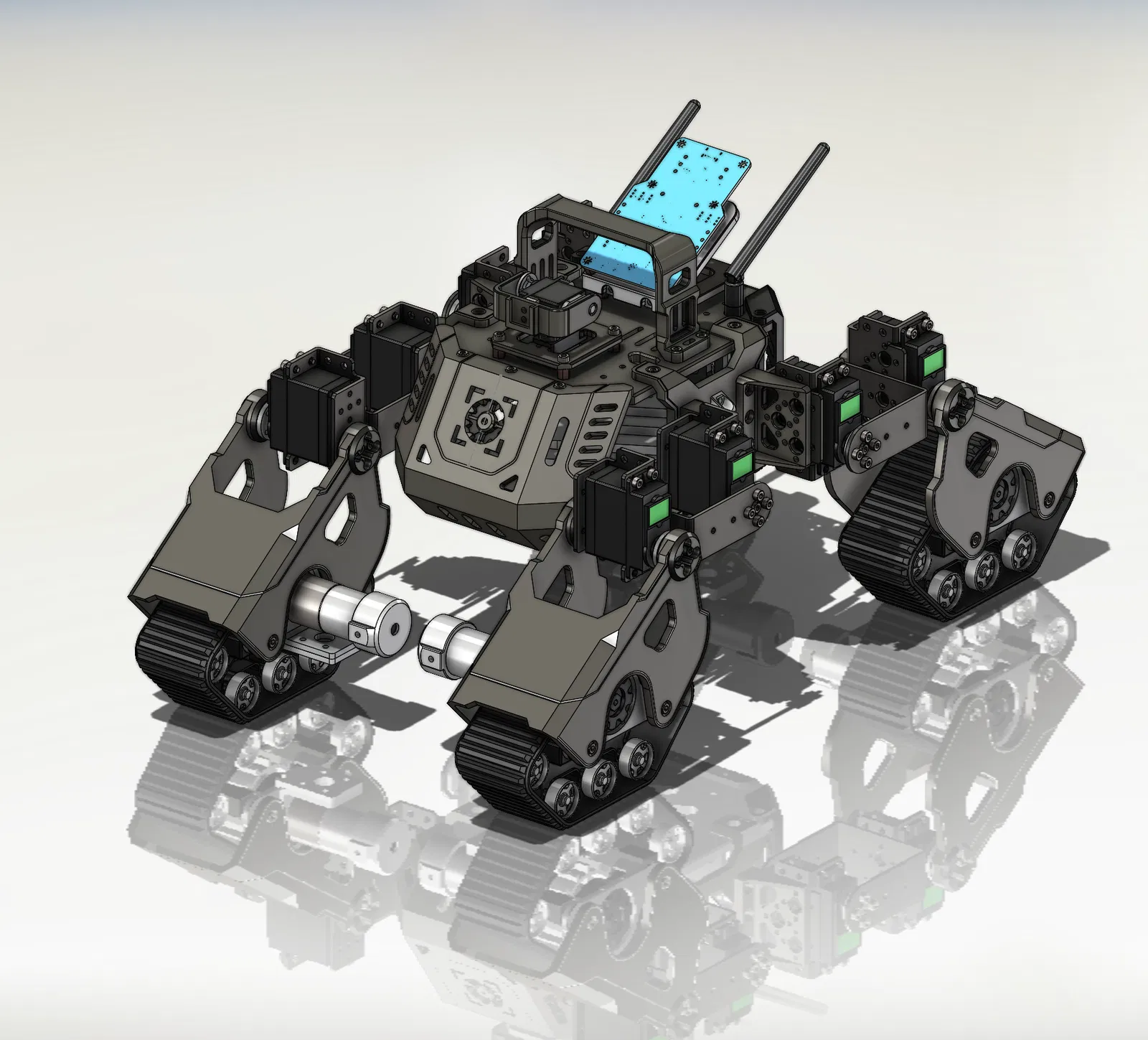
Trong dự án này, robot lai "Titan" có hai chế độ di chuyển: chế độ bốn chân và chế độ bánh xích, cho phép nó thích ứng cấu hình cho các môi trường và địa hình khác nhau. Cấu hình bốn chân có tổng cộng 8 bậc tự do (DOF), với 2 DOF cho mỗi chân. Thiết kế đầu chân được tích hợp liền mạch vào cụm bánh xích, nơi mỗi đơn vị bánh xích được cấp nguồn bởi một động cơ DC chuyên dụng.
Bo mạch điều khiển trung tâm của robot sử dụng bộ vi điều khiển ESP32-WROVER-E (với biến thể V2.0 sử dụng ESP32-PICO-D4), hỗ trợ điều khiển tích hợp cho servo bus, servo PWM và động cơ DC. Nó cũng bao gồm các thành phần phần cứng bổ sung, chẳng hạn như gia tốc kế sáu trục, giao diện màn hình OLED, các hạt LED RGB và còi báo động.
Ở chế độ bánh xích, robot đạt tốc độ cao trên các bề mặt phẳng hoặc hơi không bằng phẳng, đồng thời giảm thiểu sử dụng năng lượng so với chuyển động bằng chân. Chế độ bốn chân vượt trội trong việc vượt qua chướng ngại vật, thích ứng nhanh nhẹn với các địa hình đa dạng và đầy thử thách, đồng thời giải quyết các giới hạn về độ cao cố hữu trong thiết kế bánh xích. Sự đổi mới cốt lõi nằm ở sự phối hợp giữa chân và bánh xích, kết hợp sức mạnh của robot bốn chân mô phỏng sinh học với khả năng di chuyển bằng bánh xích để vượt qua các vách đá dốc và các thử thách địa hình khó khăn khác.
Hướng dẫn in
Đây là các hướng dẫn in bạn cần tuân theo để có kết quả in các bộ phận tốt:
Loại ruột (Infill type)
Gyroid, Honeycomb, Triangle hoặc Cubic
Vật liệu cấu trúc
PETG hoặc ASA, ABS, PCTG, PA, PC, (TPU cho chân)
Vật liệu hình ảnh
PLA hoặc bất cứ thứ gì bạn thấy đẹp.
Tỷ lệ ruột (Infill percentage)
35% cấu trúc | 15% thẩm mỹ
Chiều cao lớp (Layer height)
0.2mm, khuyến nghị
Số lớp tường (Wall count)
Khuyến nghị: 4
Các lớp trên/dưới đặc (Solid top/bottom layers)
Khuyến nghị: 5
Chiều rộng đùn (Extrusion width)
0.4mm, khuyến nghị
Các công cụ cần thiết/hữu ích trước khi bắt đầu dự án:
Cần có kìm cắt dây phù hợp, dụng cụ tuốt dây, bộ tua vít chính xác. Bạn cũng sẽ cần một mỏ hàn để hàn dây và lắp các bộ chèn nhiệt.
Mỏ hàn TS101
Link Aliexpress Link Amazon (Khuyến nghị)
Bộ đầu chèn nhiệt - Cho TS101
Link Aliexpress Link Amazon (Khuyến nghị)
Tua vít điện chính xác
Link Aliexpress Link Amazon (Khuyến nghị)
Bộ lục giác (Allen Key Set)
Bộ chìa Torx (Torx Key Set)
Tua vít lực xoắn (Torque Screwdriver)
Dụng cụ tuốt dây (Wire stripper)
Kìm cắt dây (Wire cutter)
Dụng cụ ép chèn nhiệt (Heat Insert Press Tool)
Kìm bấm cos (Crimp Tool)
Mỏ hàn - Loại phổ thông (Thay thế)
Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Bộ đầu chèn nhiệt - Loại phổ thông (Thay thế)
Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Bộ tua vít chính xác
Link Aliexpress Link Amazon Lựa chọn tiết kiệm chi phí
Phần mềm
Bạn có thể tải mã nguồn của dự án tại đây. https://github.com/ToolKnox/Titan
Dự án được thực hiện trên VScode + PlatformIO

Thư viện (lib):
- Adafruit_NeoPixel: Điều khiển driver đèn LED WS2812B (có chút lỗi, đèn đầu tiên hơi khó điều khiển và cần thay đổi)
- Adafruit_PWM_Servo_Driver_Library: Thư viện điều khiển và giao tiếp PCA9685
- MPU6050: Cảm biến gia tốc
- U8g2: Driver cho màn hình OLED 0.96 inch
src/drive:
- Hiwonde.h/.cpp: Thư viện giao tiếp servo bus nối tiếp
- ServoDrive.h/.cpp: Thư viện điều khiển driver servo PWM (PCA9685)
- IOs. h/. cpp: Thư viện cấu hình và điều khiển chân GPIO
- IMU.h/.cpp: Thư viện giao tiếp cảm biến gia tốc MPU6050
- DCMotorDrive.h/.cpp: Thư viện điều khiển driver động cơ DC
src/dynamics:
- FKIK.h/.cpp: Giải mã tiến và nghịch cho từng chân
- MotionControl.h/.cpp: Thư viện điều khiển chuyển động và tư thế của robot
Ứng dụng di động:
- Android
- Giao tiếp WIFI
- Giao thức TCP

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình



















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!