Máy Phun Nước Tự Động Cho Mèo

Mô hình máy phun nước tự động cho mèo, giúp thú cưng luôn có nước sạch. Máy sẽ tự động hoạt động khi mèo đến gần, dễ dàng lắp ráp với các linh kiện điện tử cơ bản và mã nguồn Arduino.
1.1K
Lượt Xem
52
Lượt Thích
123
Lượt Tải
Cập Nhật Dec 19, 2025













Mô tả
Máy phun nước cho mèo
Chén nước tự động có nước lưu thông cho thú cưng của bạn. Lắp ráp dễ dàng.
Khi mèo đến gần chén, máy sẽ tự động hoạt động.
Bạn có thể sử dụng breadboard để kết nối các linh kiện, chỉ cần hàn khi nối dây vào DC jack

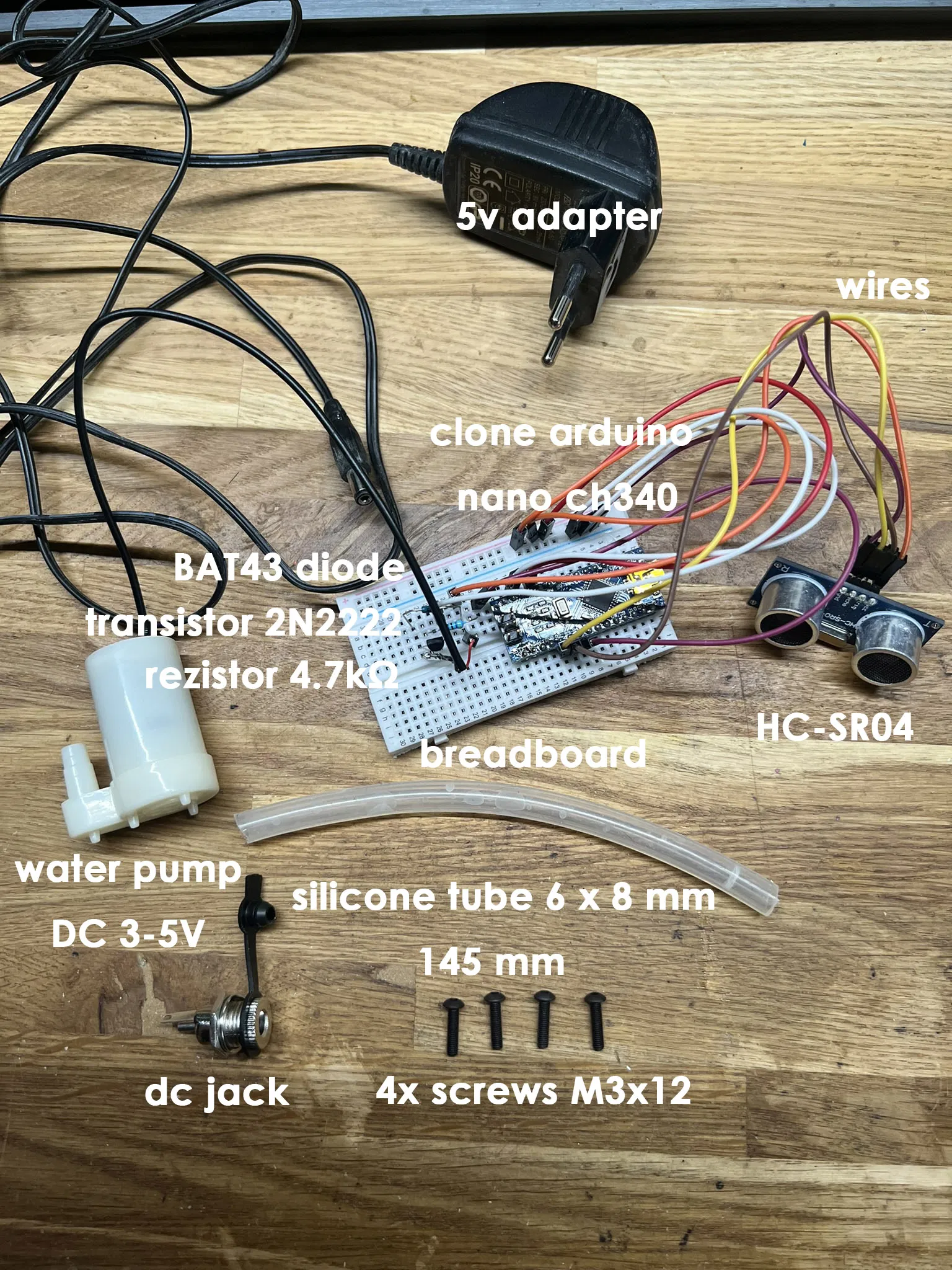
Linh kiện
- clone arudino nano ch340
- sensor HC-SR04
- breadboard
- diode BAT43
- transistor 2N2222
- điện trở 4.7kΩ
- máy bơm nước DC 3-5V
- DC jack
- ống silicon 6x8 mm - 145 mm
- 4x ốc M3x12
- adapter 5V
- dây nối
- mô hình in 3D
Cài đặt in
- chiều cao lớp in 0.2 mm
- infill 20%
- chu vi 3
- lớp đáy rắn 3
- chỉ hỗ trợ dưới "cầu ống" và ở đáy là khuyến nghị
Sơ đồ đấu dây linh kiện
Transistor (NPN, ví dụ: BC547 hoặc 2N2222)
- Base (B) → qua điện trở 4.7kΩ → D4 trên Arduino Nano
- Collector (C) → cực âm của máy bơm
- Emitter (E) → GND
Máy bơm (DC 3–5V)
- Dây đỏ (cực dương) → nguồn cấp 5V
- Dây đen (cực âm) → collector của transistor
Diode BAT43 (bảo vệ chống dòng điện ngược)
- Anode (+) → collector của transistor
- Cathode (−) → +5V (nguồn cấp cho máy bơm)
HC-SR04 (cảm biến siêu âm)
- VCC → 5V
- GND → GND
- Trig → D2 trên Arduino Nano
- Echo → D3 trên Arduino Nano
Mã nguồn
#define TRIG_PIN 3
#define ECHO_PIN 2
#define PUMP_PIN 4
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
pinMode(PUMP_PIN, OUTPUT);
digitalWrite(PUMP_PIN, LOW);
Serial.begin(9600);
}
long measureDistance() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH);
long distance = duration * 0.034 / 2; // Đổi sang cm
return distance;
}
void loop() {
long distance = measureDistance();
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
if (distance < 25) { // Nếu có vật cản cách dưới 25 cm
digitalWrite(PUMP_PIN, HIGH); // Bật máy bơm
delay(15000); // 15 giây
digitalWrite(PUMP_PIN, LOW); // Tắt máy bơm
}
delay(5000); // Khoảng nghỉ ngắn giữa các lần đo
}Giấy phép

File mô hình
Đang tải files, vui lòng chờ...


Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!