Cơ chế Trục Vít Tự Đảo Chiều Biết Đi!

Khám phá mô hình "Cơ chế Trục Vít Tự Đảo Chiều Biết Đi!", một sáng tạo độc đáo sử dụng cơ chế trục vít tự đảo chiều để tạo ra một bộ máy biết đi. Mô hình này yêu cầu độ chính xác cao khi lắp ráp và in 3D, sử dụng các bộ phận như động cơ N20, pin Lipo và dây thép nhạc. Hướng dẫn chi tiết bao gồm các bước lắp ráp cơ chế chính và các bộ phận di chuyển (bogie) để mang lại trải nghiệm thú vị cho người dùng.
























Mô tả
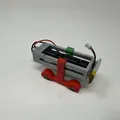
"Self Reversing Screw Mechanism, Walking!" sử dụng cơ chế trục vít tự đảo chiều từ mô hình "Marblevator, Self Reversing Screw Lift" của tôi để tạo ra một cơ chế đi bộ.
Thay vì nâng lên và hạ xuống các con lăn như trong mô hình Marblevator, hai "bogie" được trượt về phía trước và phía sau dọc theo đường ray của cơ chế. Các hốc bánh xe, bánh xe và trục được thiết kế sao cho khi bogie trượt về phía trước, bánh xe sẽ quay, và khi bogie trượt về phía sau, bánh xe sẽ khóa lại. Do đó, khi một bogie lăn về phía trước, phần còn lại sẽ khóa tại chỗ để cho phép cơ chế di chuyển về phía trước.
Như thường lệ, tôi có thể đã quên một hoặc hai tệp hoặc thứ gì đó khác, vì vậy nếu bạn có bất kỳ câu hỏi nào, xin đừng ngần ngại hỏi vì tôi chắc chắn có mắc nhiều lỗi.
Được thiết kế bằng Autodesk Fusion 360, cắt lát bằng Ultimaker Cura 4.12.1 và in 3D bằng PLA, Tough PLA và TPU trên máy Ultimaker S5 và Ultimaker 3e.
Các bộ phận.
Tôi đã mua các bộ phận sau:
• Một động cơ hộp số N20 60RPM. • Một pin lipo 3.7VDC 100MA với đầu nối dây JST tương ứng. • Một đoạn dây thép nhạc đường kính 1.85mm dài 100mm.
Tôi đã in 3D các bộ phận sau với chiều cao lớp 0.15mm, mật độ điền 20%, PLA và không cần hỗ trợ trừ khi có ghi chú khác:
• Hai "Cap.stl". • Hai "Leg.stl", Tough PLA. • Một "Motor Mount and Traveler Pin Guide.stl". • Một "Screw.stl", chiều cao lớp 0.1mm, mật độ điền 20%, vòi phun 0.25mm, Tough PLA. • Một "Traveler Pin Guide.stl". • Hai "Traveler.stl", chiều cao lớp 0.1mm, mật độ điền 20%, Tough PLA, có hỗ trợ. • Một "Wheel Well Left.stl", chiều cao lớp 0.15mm, mật độ điền 20%, Tough PLA. • Một "Wheel Well Right.stl", chiều cao lớp 0.15mm, mật độ điền 20%, Tough PLA. • Bốn "Wheel.stl", chiều cao lớp 0.1mm, mật độ điền 20%, TPU.
Đây là một mô hình in 3D và lắp ráp có độ chính xác cao, sử dụng các bộ phận nhỏ, chính xác trong không gian chật hẹp. Trước khi lắp ráp, hãy thử lắp và cắt, dũa, chà nhám, đánh bóng, v.v. tất cả các bộ phận nếu cần để chuyển động mượt mà của các bề mặt di chuyển và khớp chặt cho các bề mặt không di chuyển. Tùy thuộc vào máy in, cài đặt máy in và màu sắc bạn chọn, có thể cần cắt, dũa, chà nhám và/hoặc đánh bóng nhiều hay ít. Cẩn thận dũa tất cả các cạnh đã tiếp xúc với tấm đế để đảm bảo hoàn toàn loại bỏ mọi "nhựa thừa" của tấm đế và tất cả các cạnh đều nhẵn. Tôi đã sử dụng dũa kim hoàn nhỏ và rất nhiều kiên nhẫn để thực hiện bước này.
Lắp ráp cơ chế trục vít tự đảo chiều.
Để lắp ráp cơ chế trục vít tự đảo chiều, tôi đã thực hiện các bước sau:
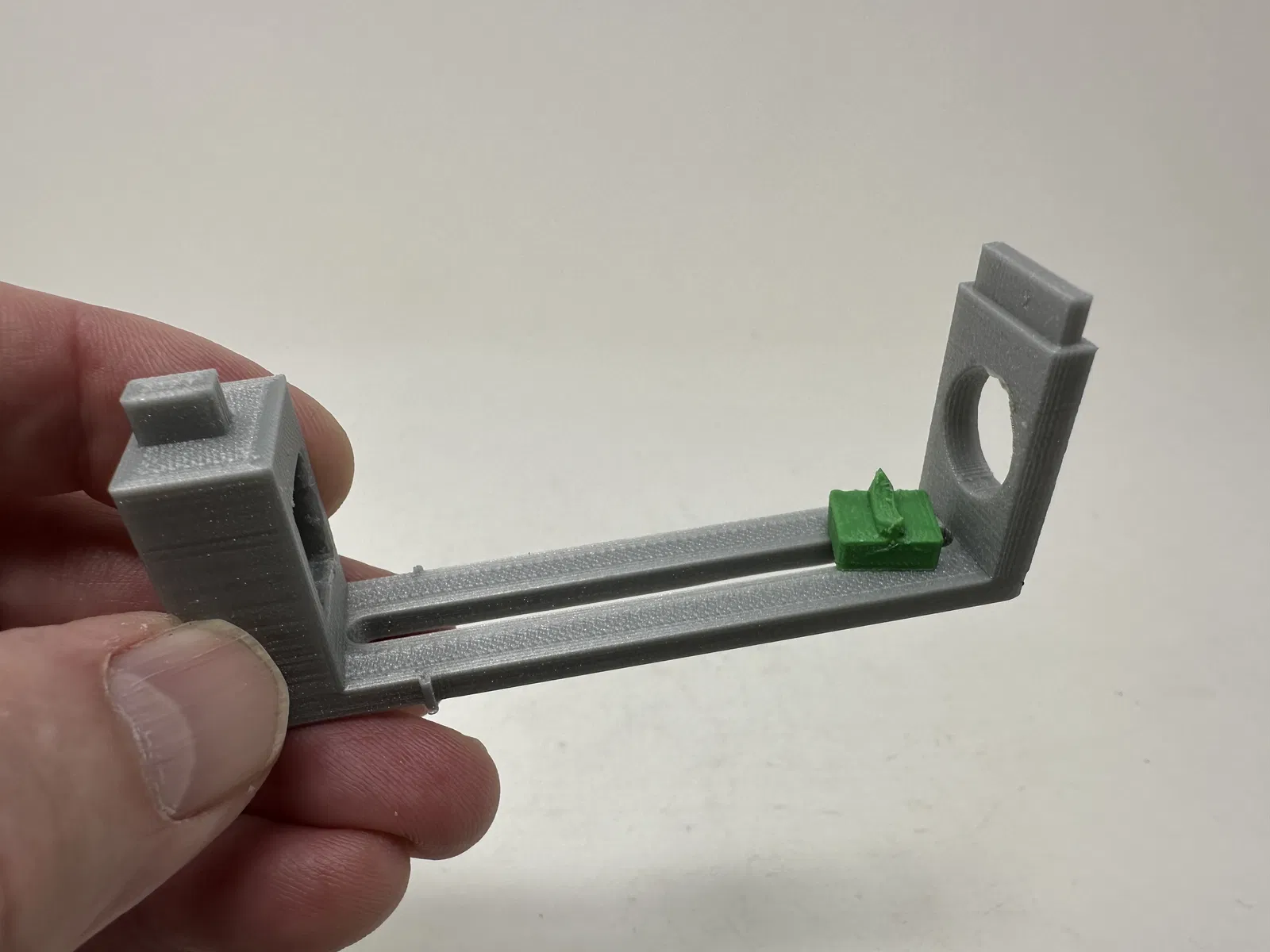
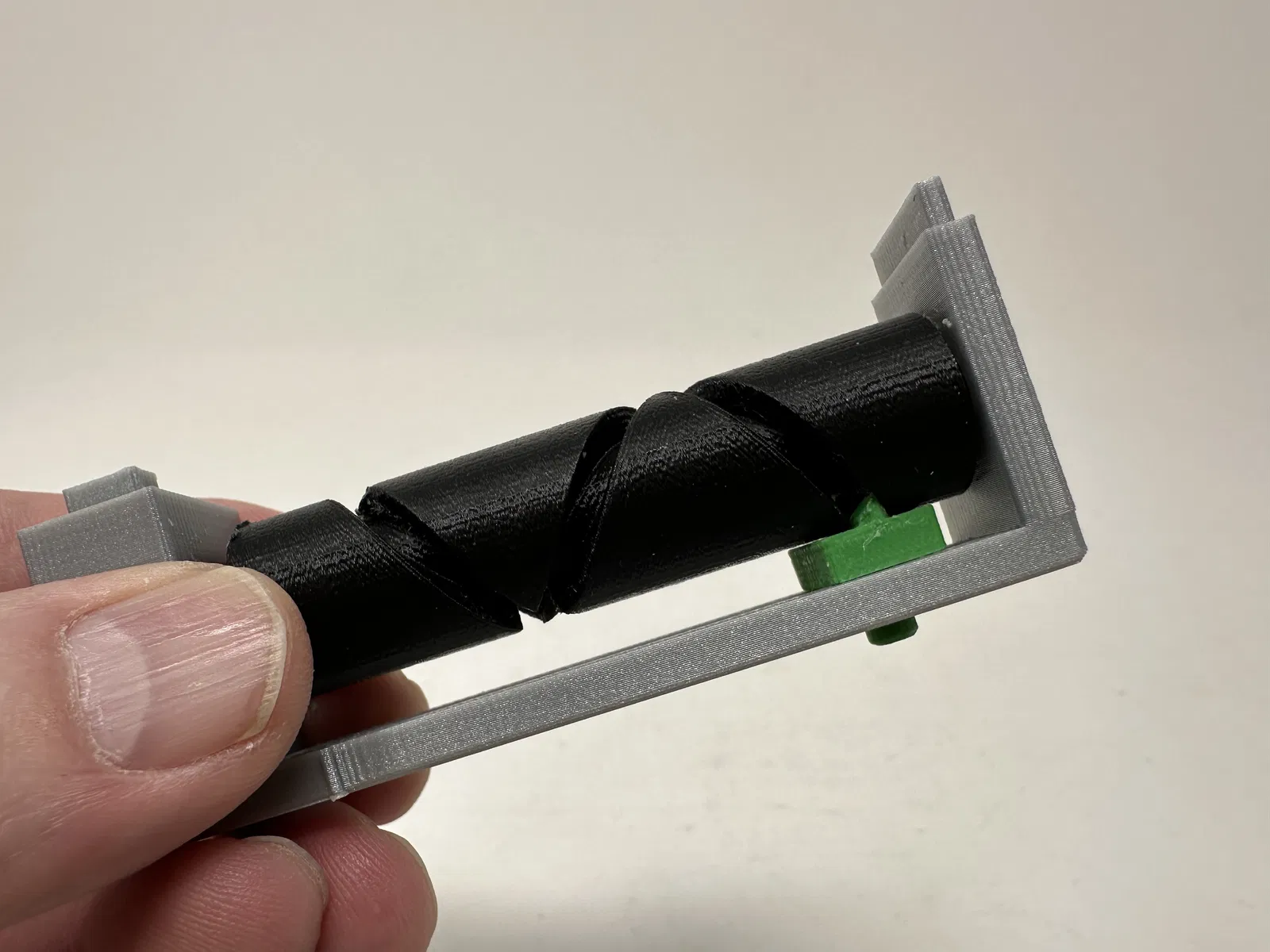
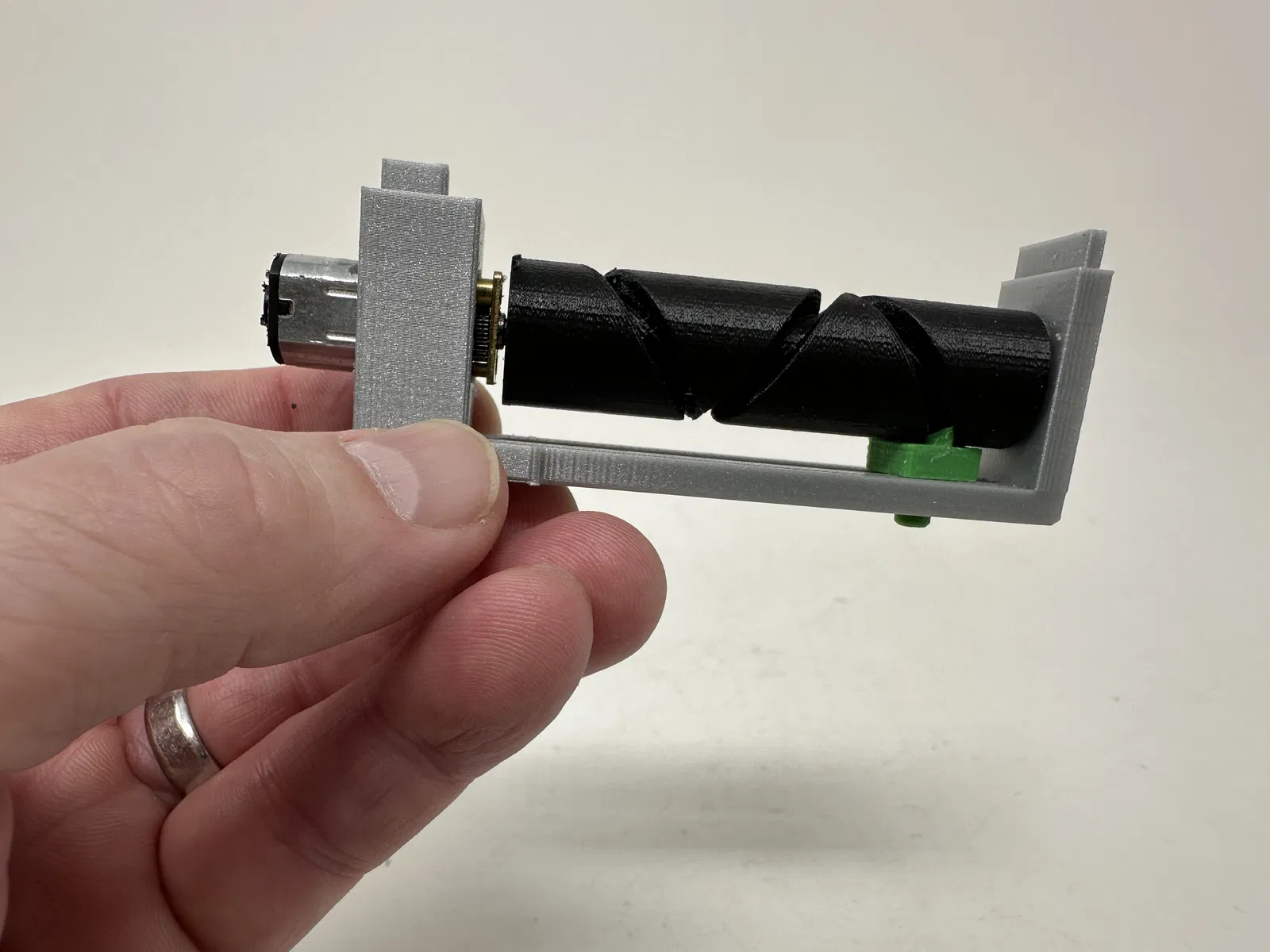
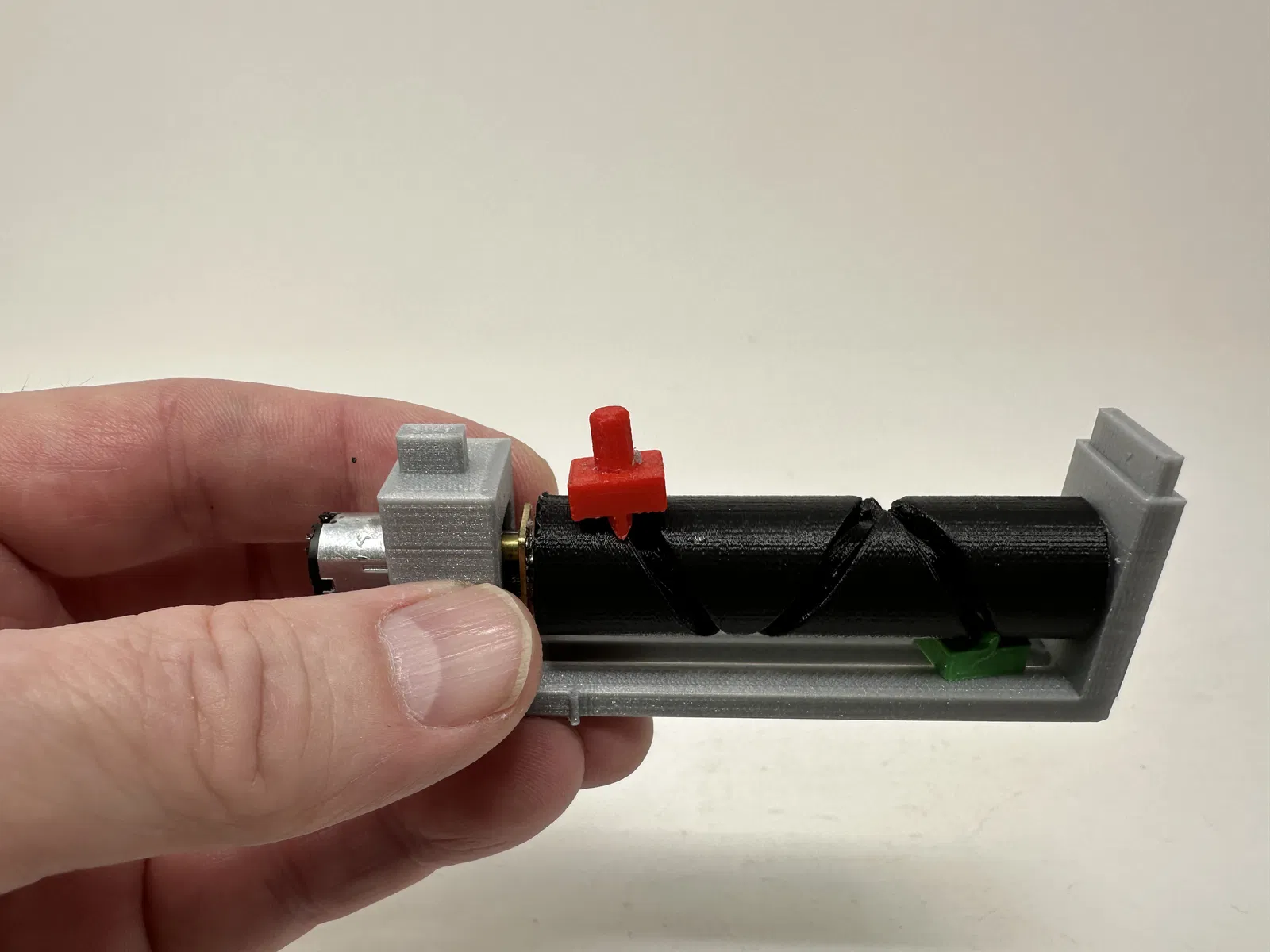
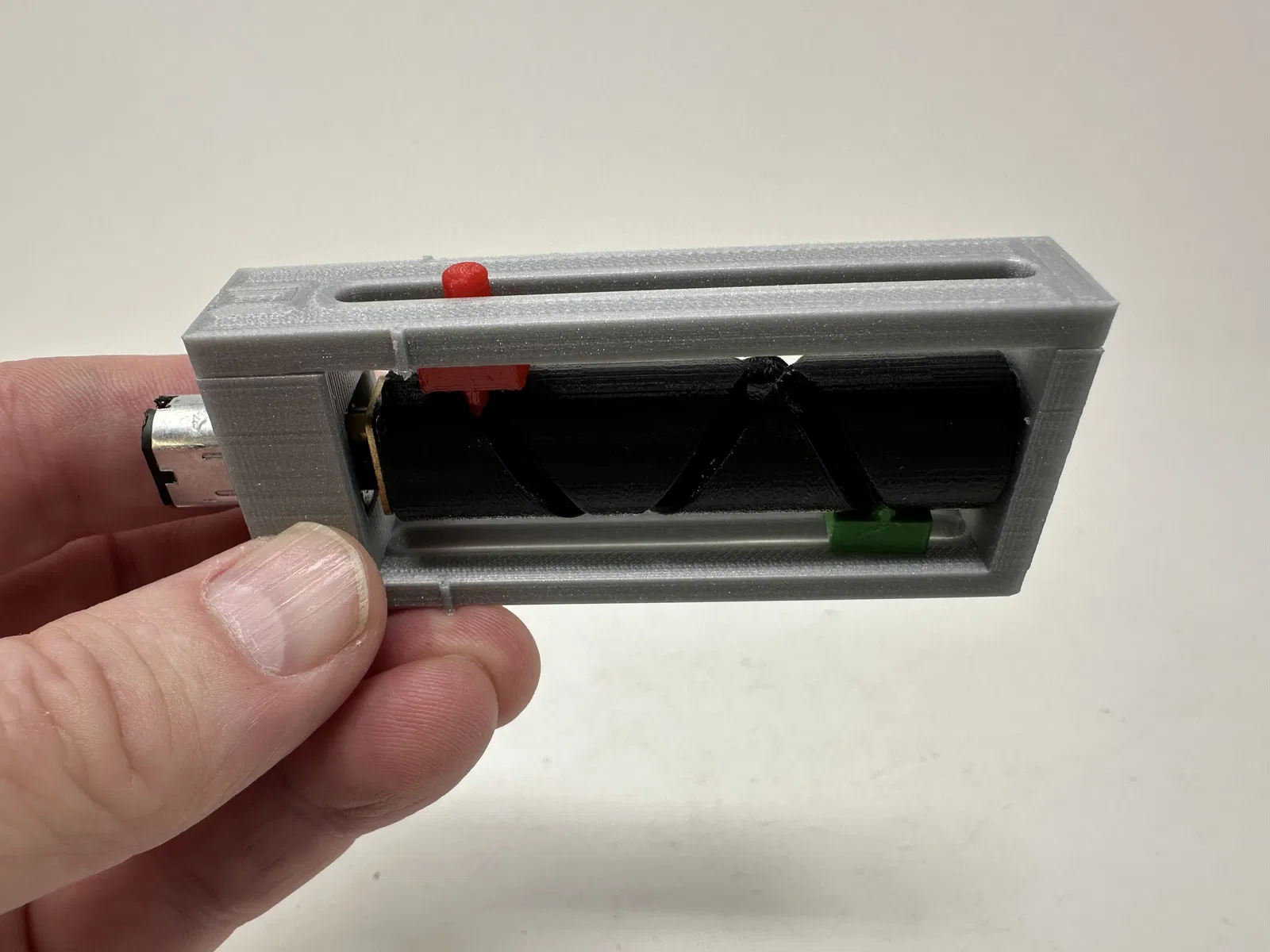
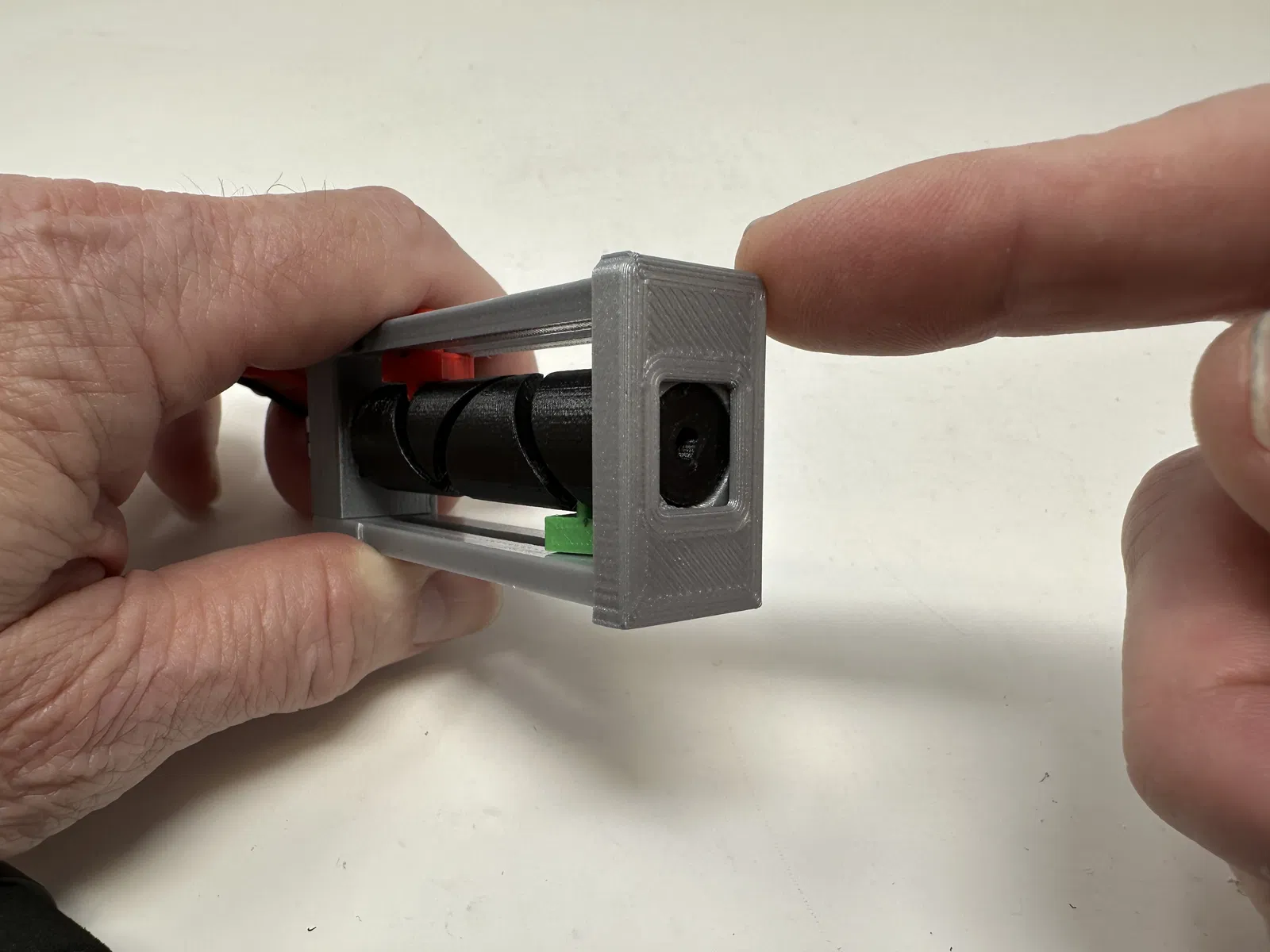
• Tạm thời dán một "Traveler.stl" vào "Motor Mount and Traveler Pin Guide.stl" bằng sáp dầu như trong hình. • Đặt "Screw.stl" vào cụm lắp ráp, trượt trục vào lỗ tròn ở trên cùng của cụm lắp ráp, và đảm bảo rằng bộ phận trượt được đặt đúng vị trí trong vòng xoắn trên cùng của trục vít. • Trượt động cơ vào cụm lắp ráp với trục động cơ được cắm hoàn toàn vào trục vít. • Tạm thời dán "Traveler.stl" còn lại vào vòng xoắn dưới cùng của trục vít bằng sáp dầu. • Ép "Traveler Pin Guide.stl" vào cụm lắp ráp. • Ép "Cap.stl" vào đỉnh của cụm lắp ráp. • Hàn đầu nối dây JST vào động cơ, dây đỏ vào "+", dây đen vào "-". • Ép "Cap.stl" còn lại vào đầu động cơ của cụm lắp ráp.
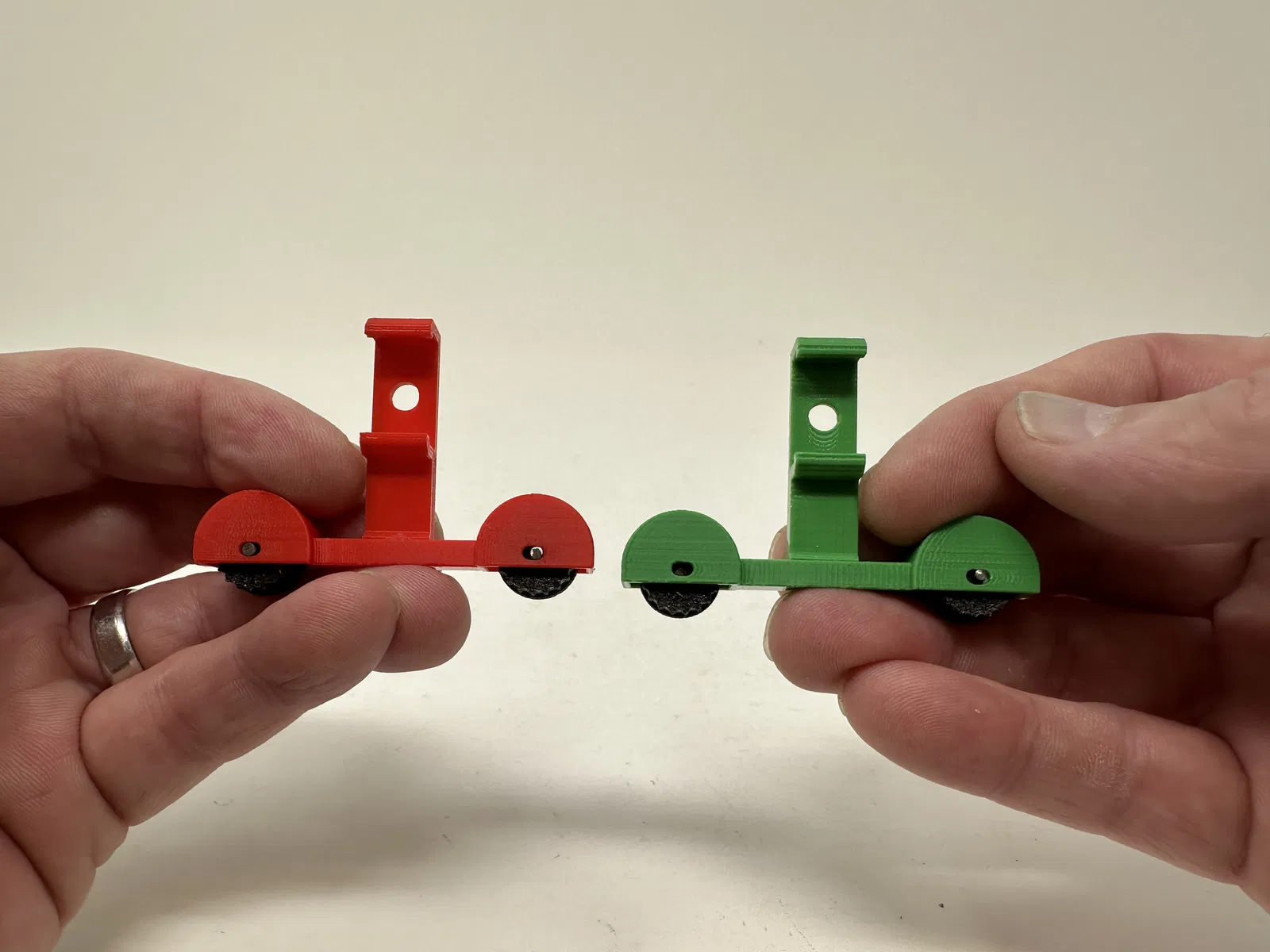
Lắp ráp các bogie.
Để lắp ráp các bogie, tôi đã thực hiện các bước sau:
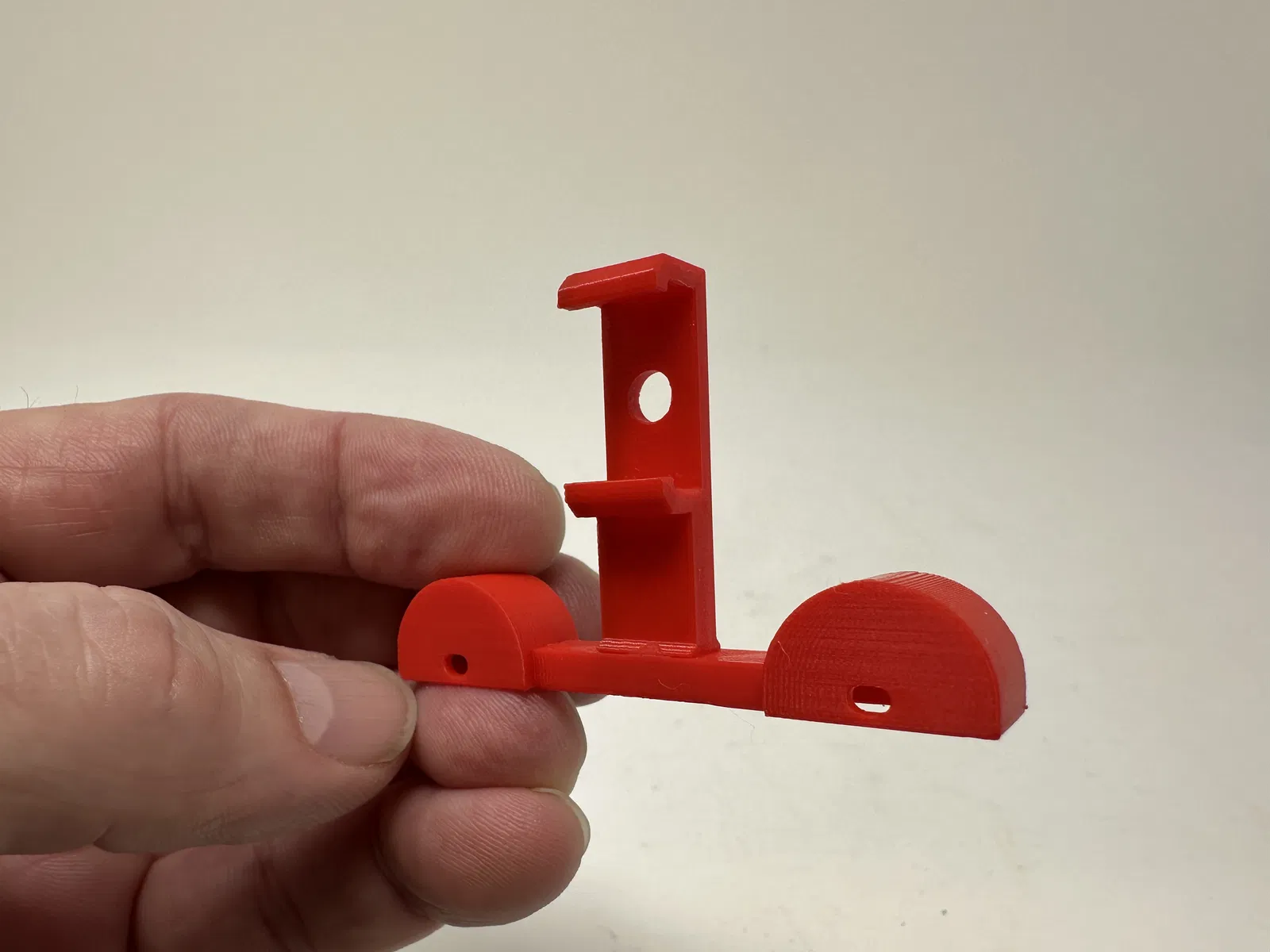
• Cắt bốn đoạn dây thép nhạc dài 10mm. • Dán "Leg.stl" vào "Wheel Well Right.stl". • Đặt "Wheel.stl" vào một trong các hốc bánh xe và cố định vào vị trí bằng một đoạn dây thép nhạc dài 10mm, đảm bảo bánh xe quay dễ dàng khi trượt về phía trước và khóa lại khi trượt về phía sau. • Lặp lại bước trước cho bánh xe và hốc bánh xe còn lại. • Lặp lại hai bước trước cho hốc bánh xe bên trái.
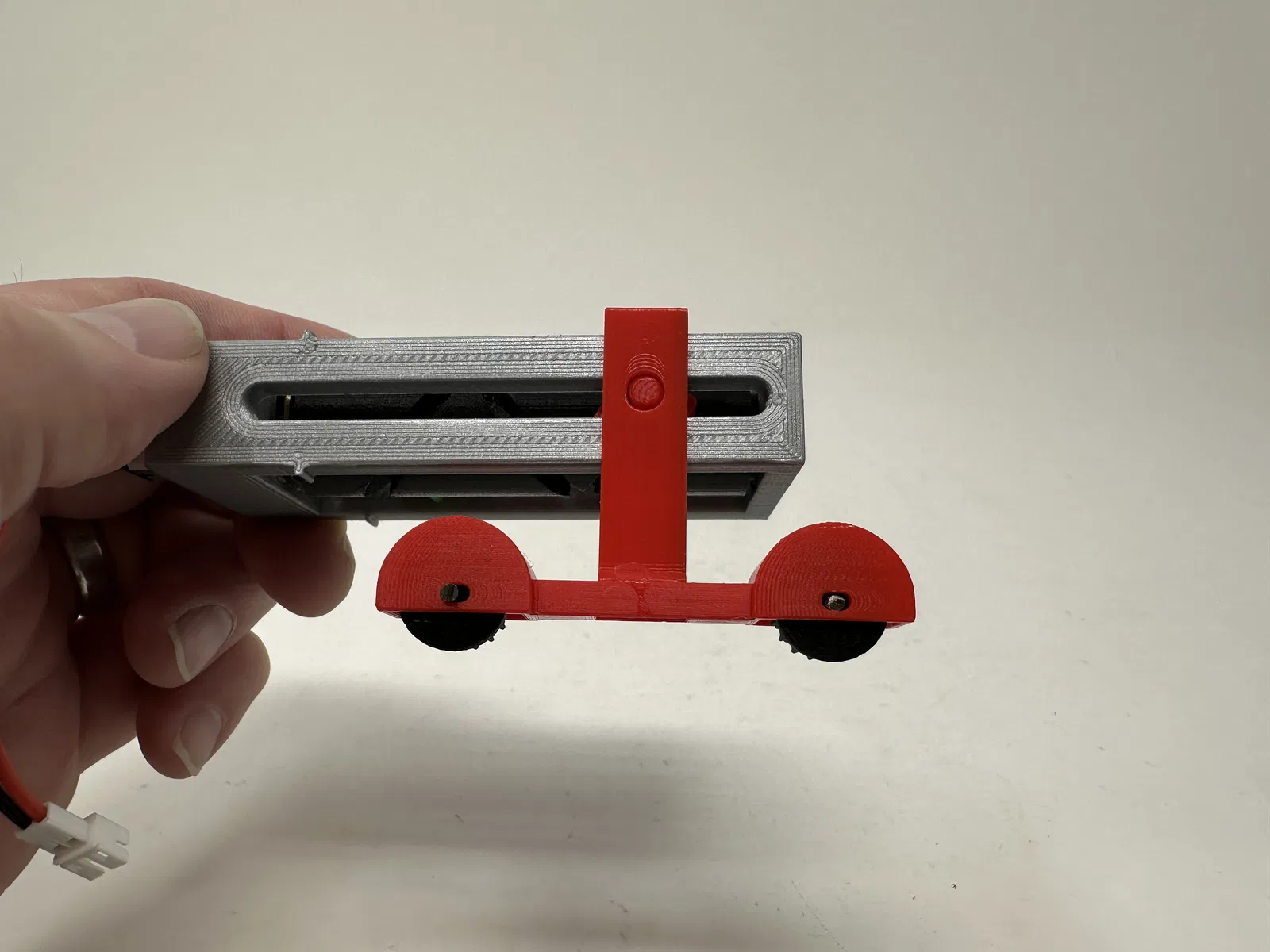
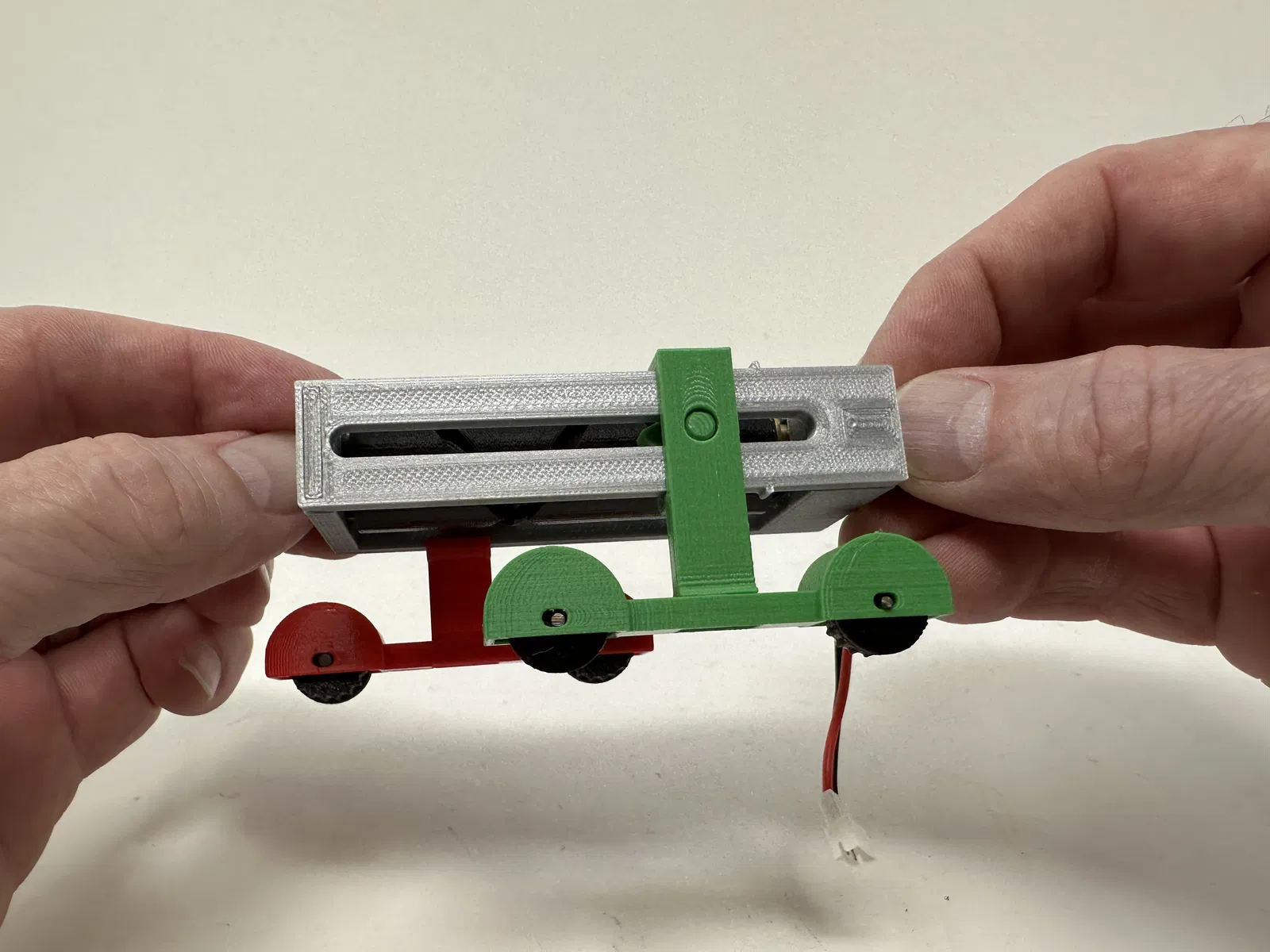
Lắp ráp cuối cùng.
Để lắp ráp cuối cùng, tôi đã thực hiện các bước sau:
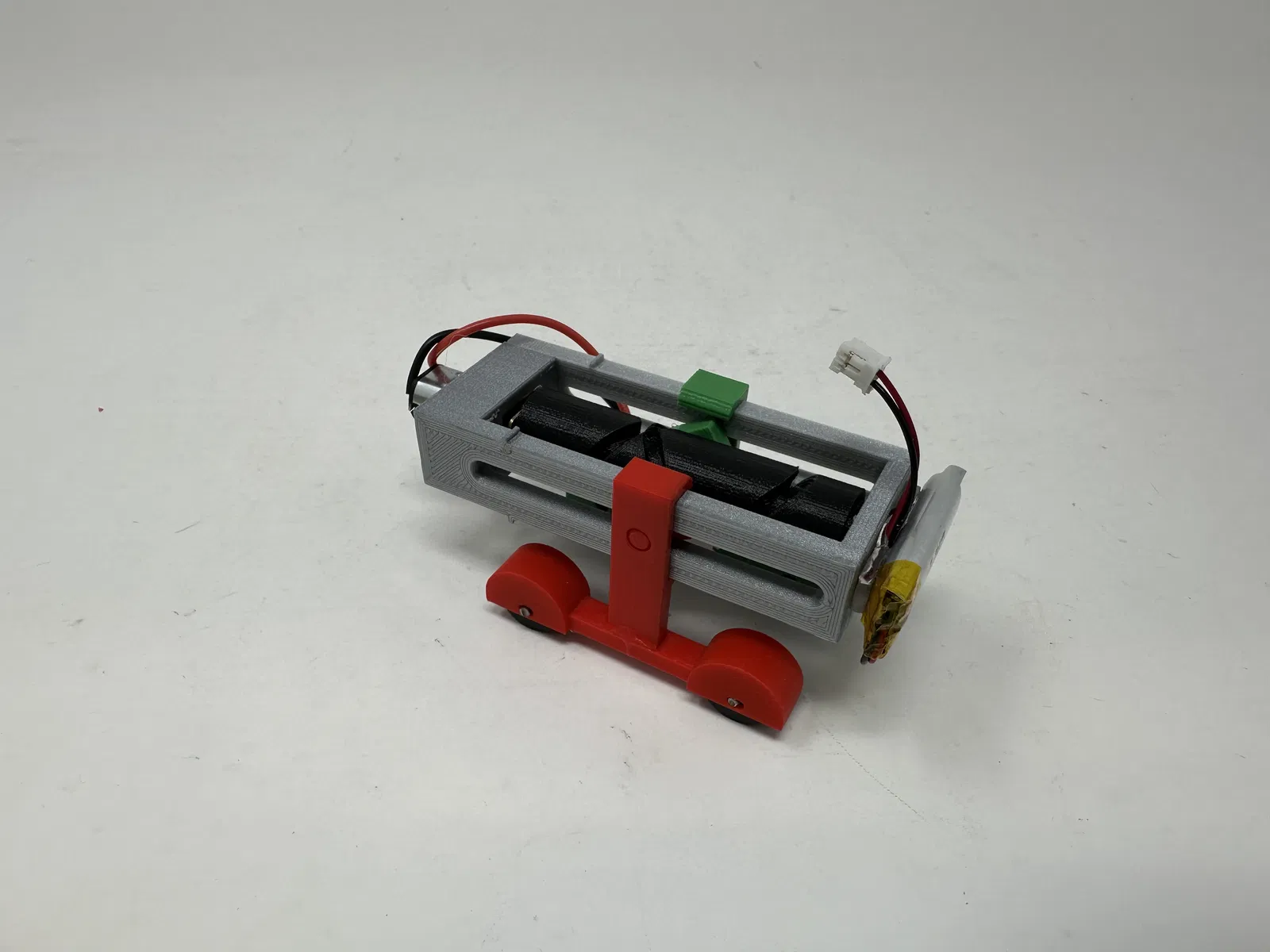
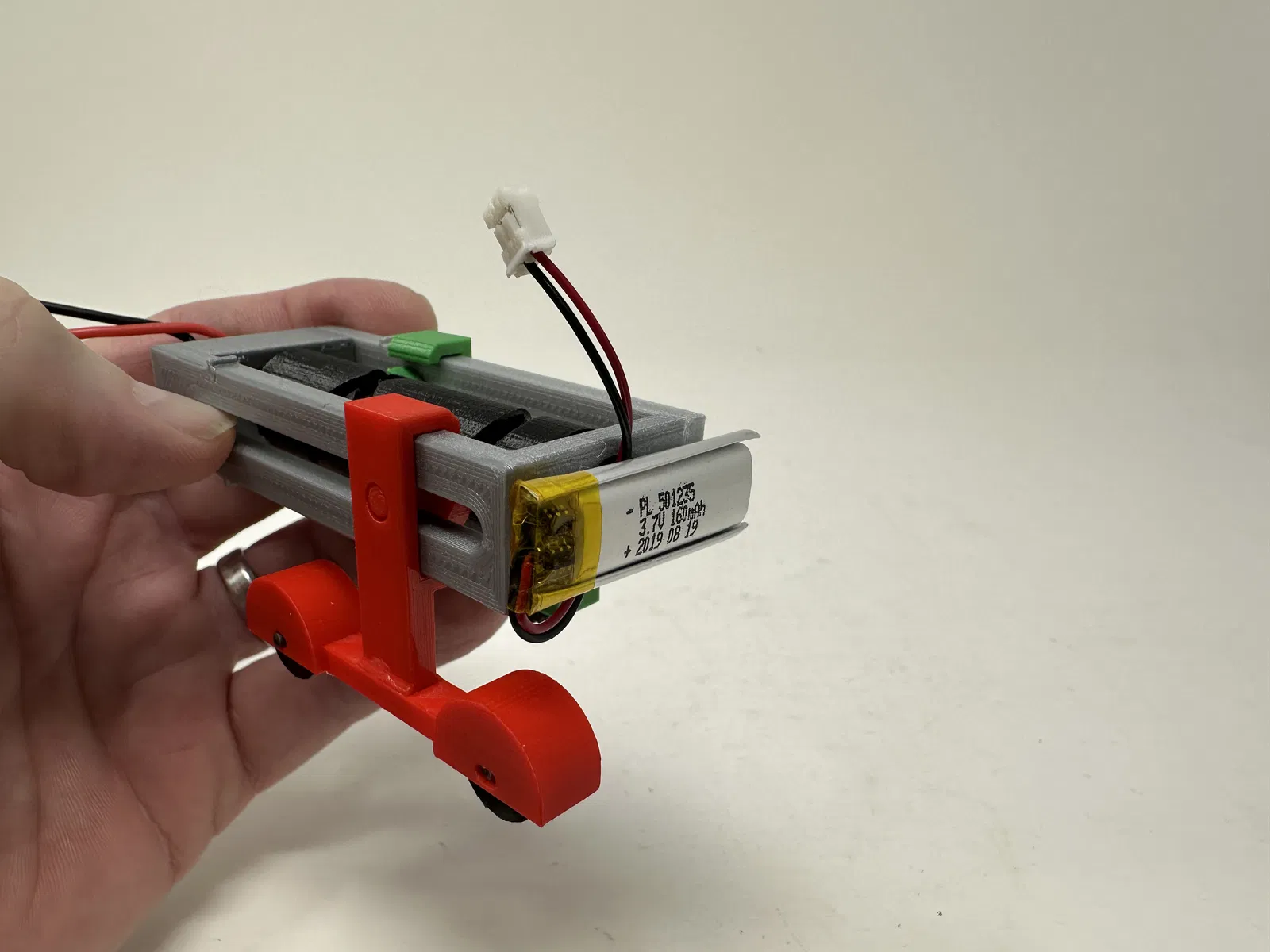
• Gắn bogie bên phải vào khung qua chốt trượt. • Gắn bogie bên trái vào khung đối diện qua chốt trượt còn lại. • Cố định pin vào cơ chế bằng băng dính hai mặt.
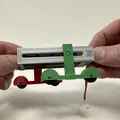
Với việc lắp ráp hoàn tất, tôi đã cắm pin vào đầu nối JST của động cơ, đặt mô hình trên một bề mặt hơi gồ ghề, và nó đã đi bộ!
Và đó là cách tôi đã in 3D và lắp ráp "Self Reversing Screw Mechanism, Walking!"
Chúc các bạn thích nó!
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình









Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!