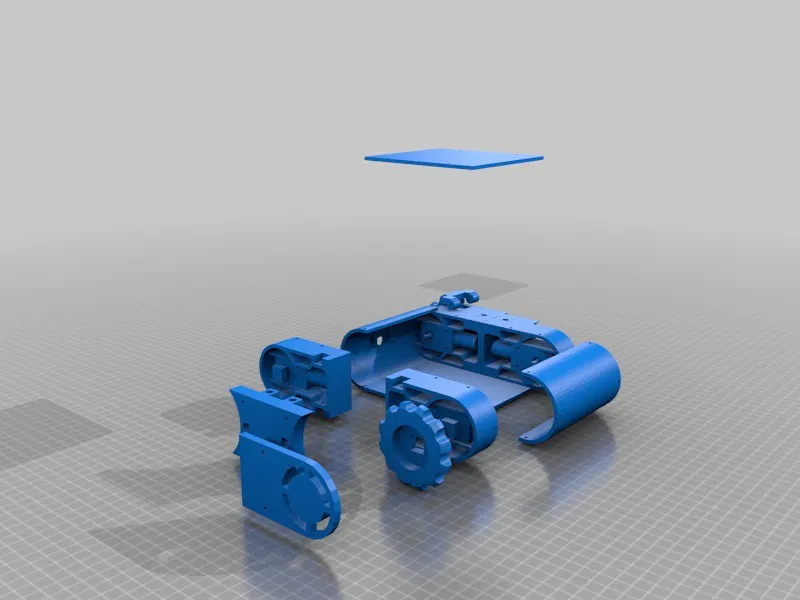
Nền tảng Rover tùy chỉnh

Khám phá nền tảng Rover 3D có thể tùy chỉnh, cho phép bạn lắp ráp nhiều khối khác nhau vào các điểm gắn kết chung. Lý tưởng cho các dự án Arduino, Raspberry Pi và robot.

















Mô tả
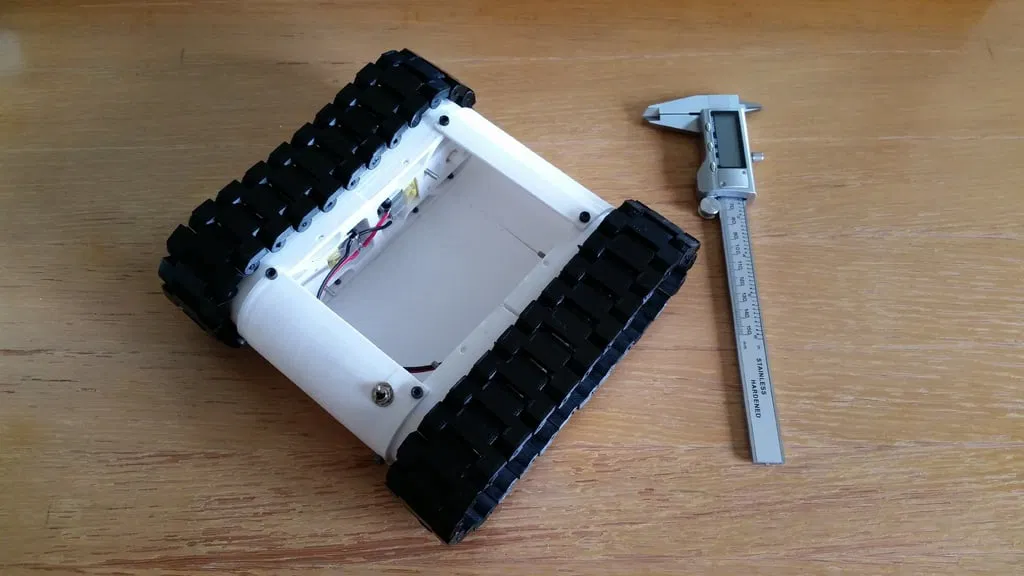
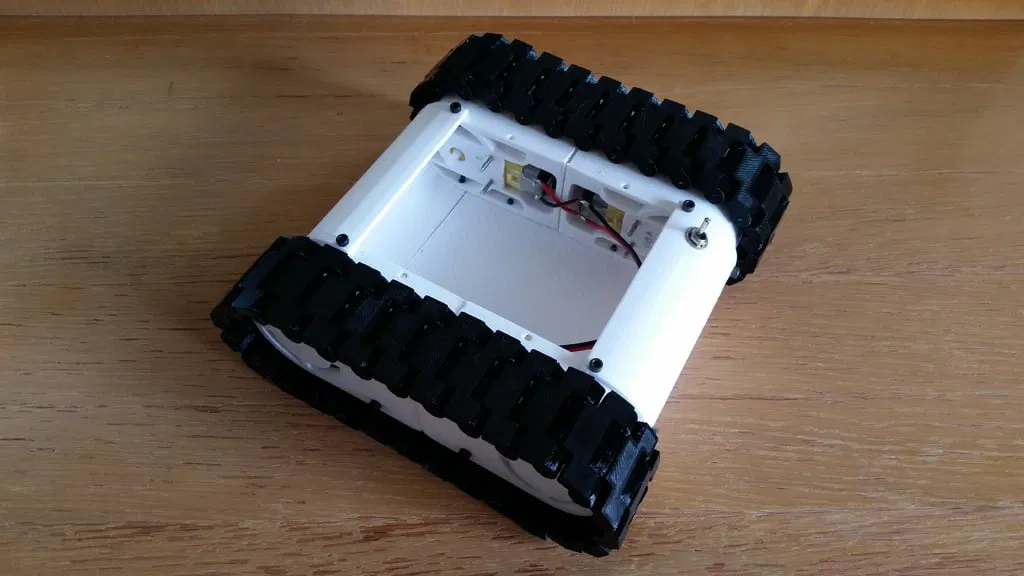
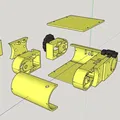
Đây là một nền tảng rover mà bạn có thể lắp ráp bằng cách chọn trong số nhiều khối vừa với các điểm gắn kết giống nhau, vì vậy bạn có thể tùy chỉnh thiết kế cho phù hợp với nhu cầu của mình.
Tôi đã thiết kế nó càng đối xứng càng tốt, cho phép bạn tái sử dụng nhiều bộ phận ở các vị trí khác nhau, ví dụ, các vỏ trước và sau có các điểm gắn kết giống nhau, cho phép bạn in Vỏ - Camera RPi cho mặt trước và Vỏ - Trống cho mặt sau. Trừ khi bạn cũng muốn có camera ở mặt sau. Bạn cũng có thể in Vỏ - Công tắc cho mặt sau, để điều khiển nguồn điện cho rover của bạn. Sự sáng tạo của bạn là giới hạn.
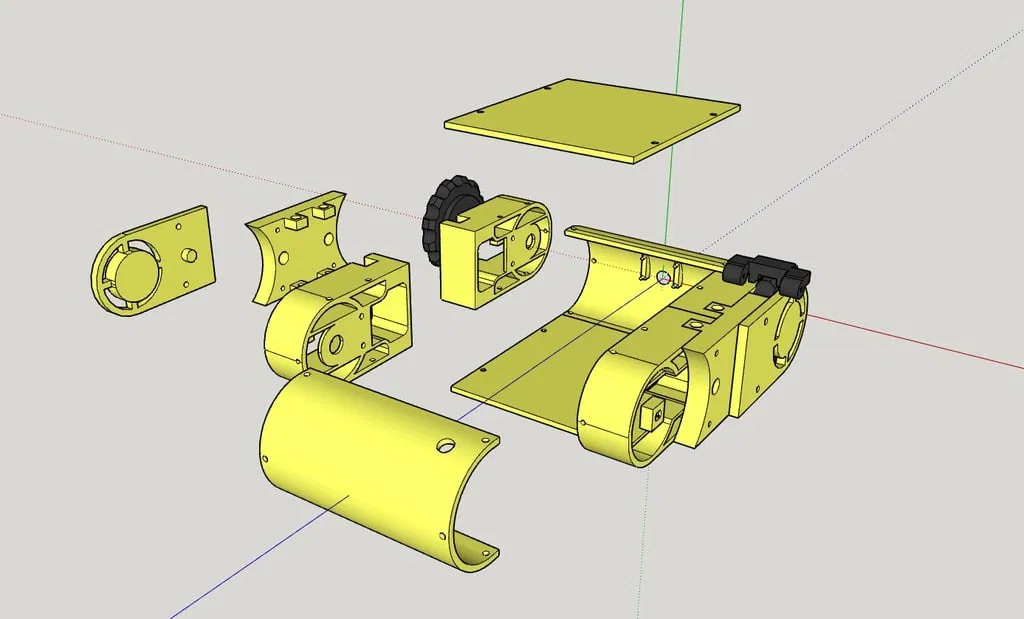
Tôi đang thiết kế cái này trên Sketchup, các tệp này cũng sẽ được tải lên, phòng trường hợp bạn muốn tự thiết kế các khối tùy chỉnh.
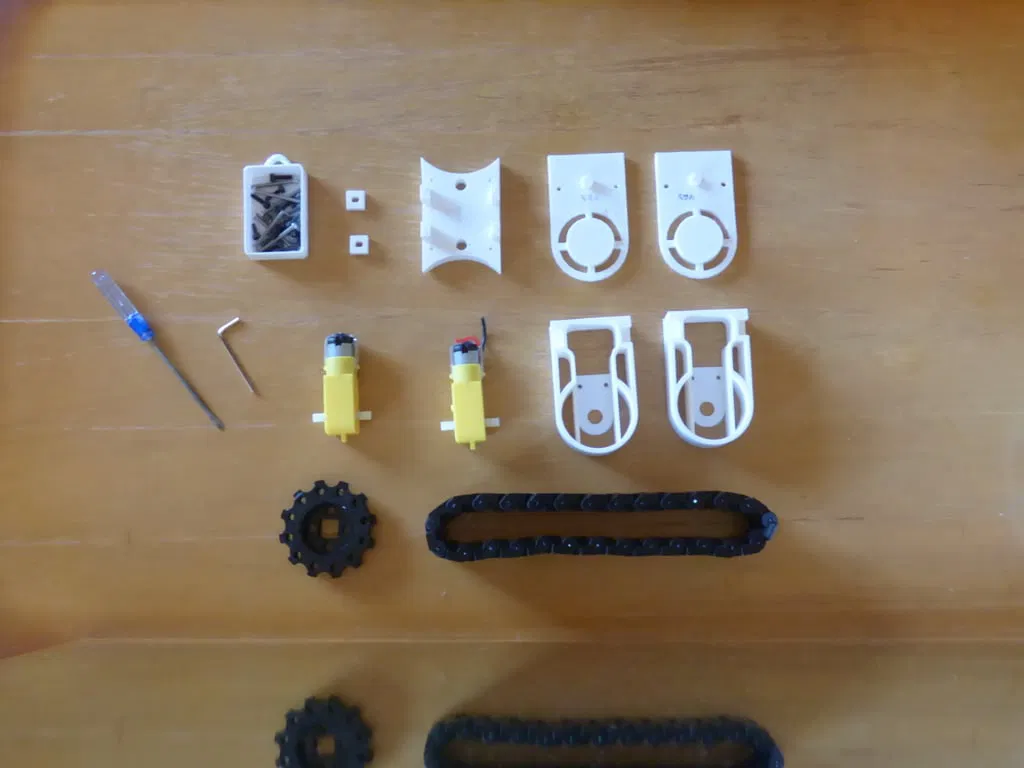
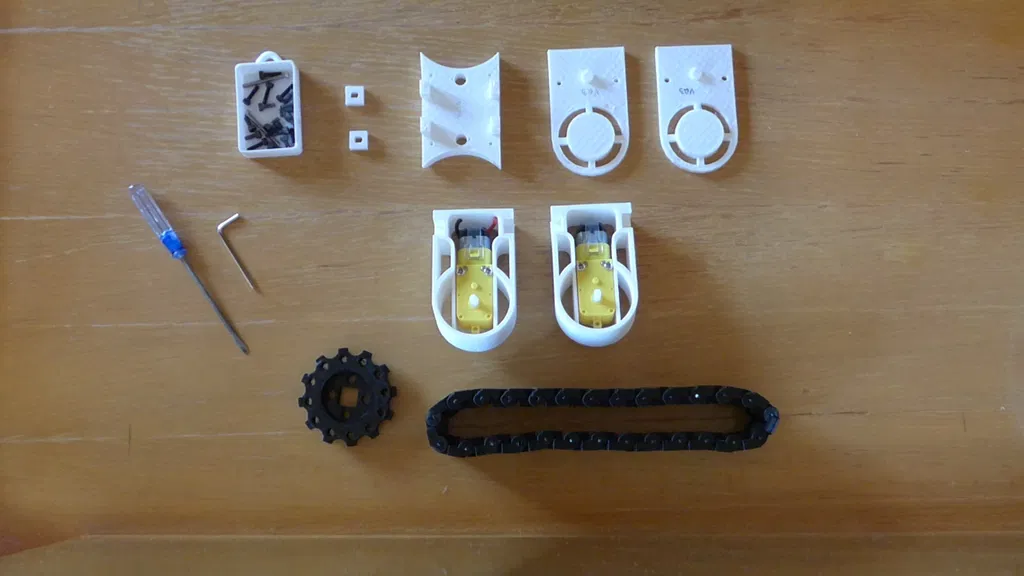
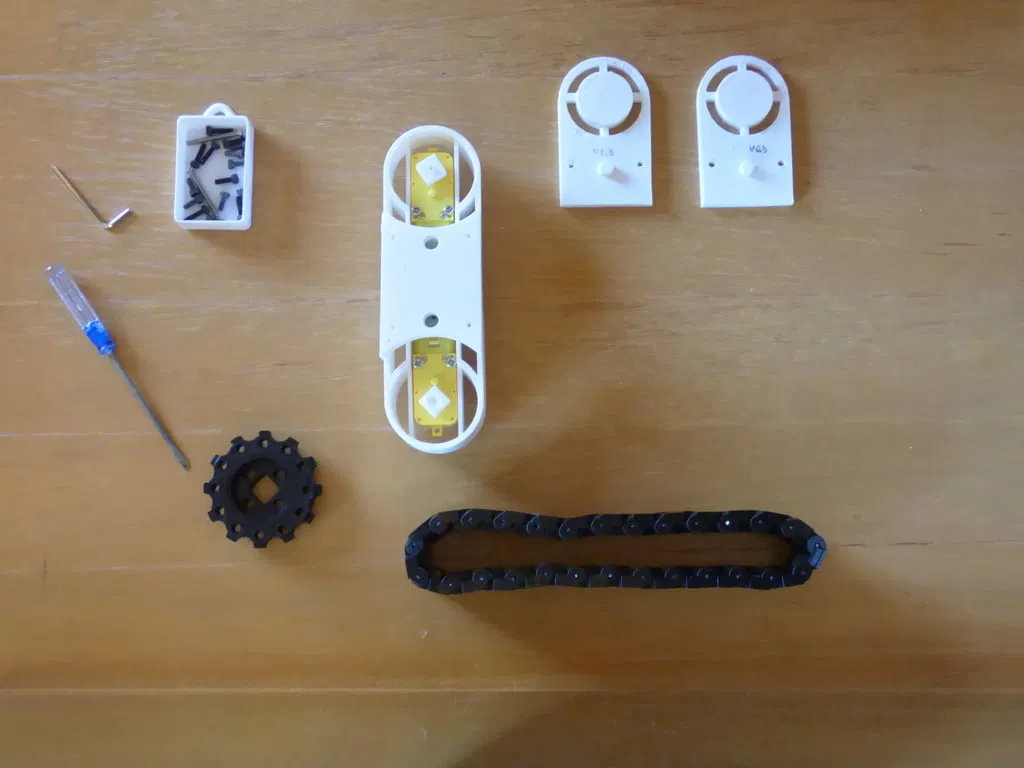
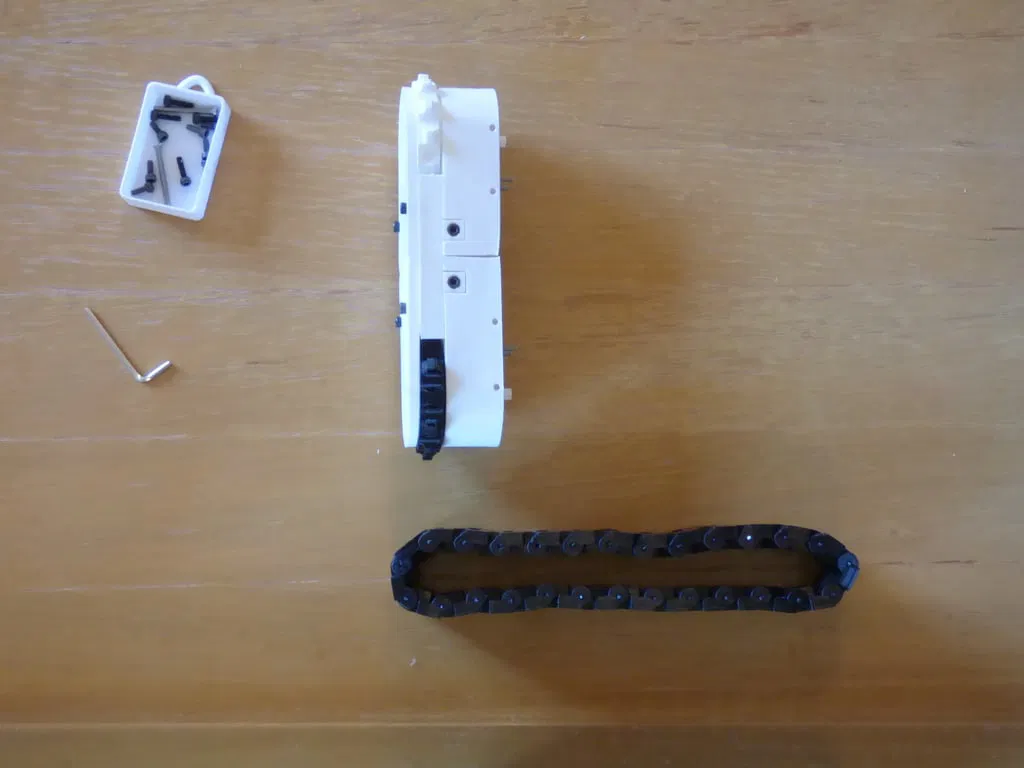
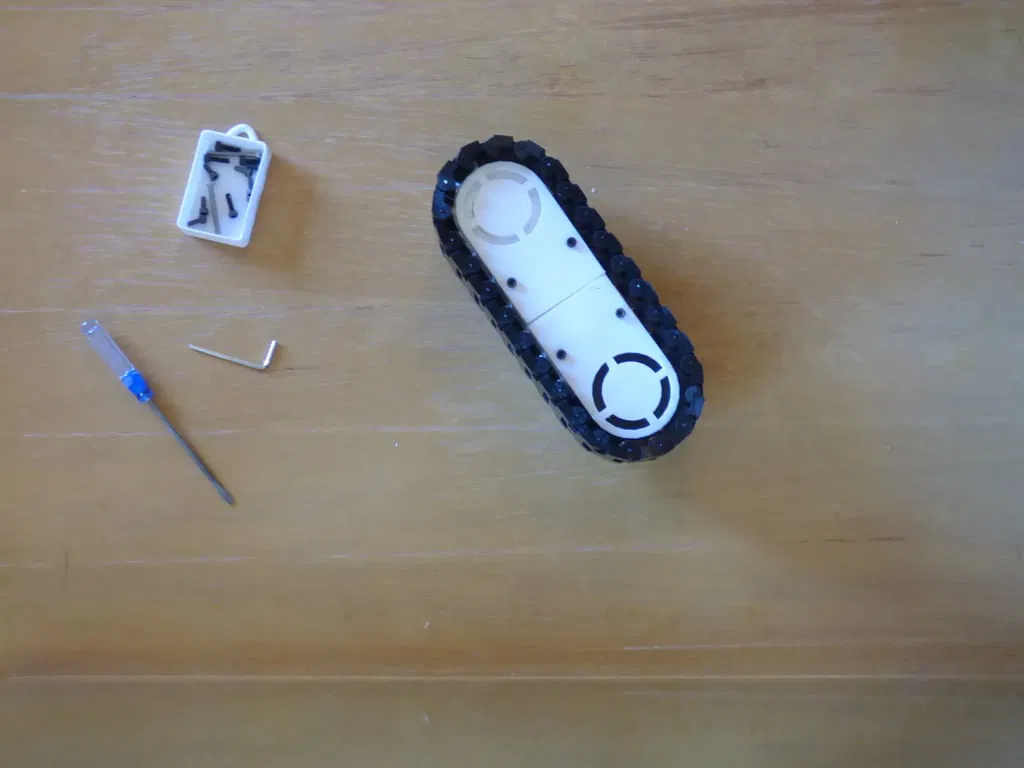
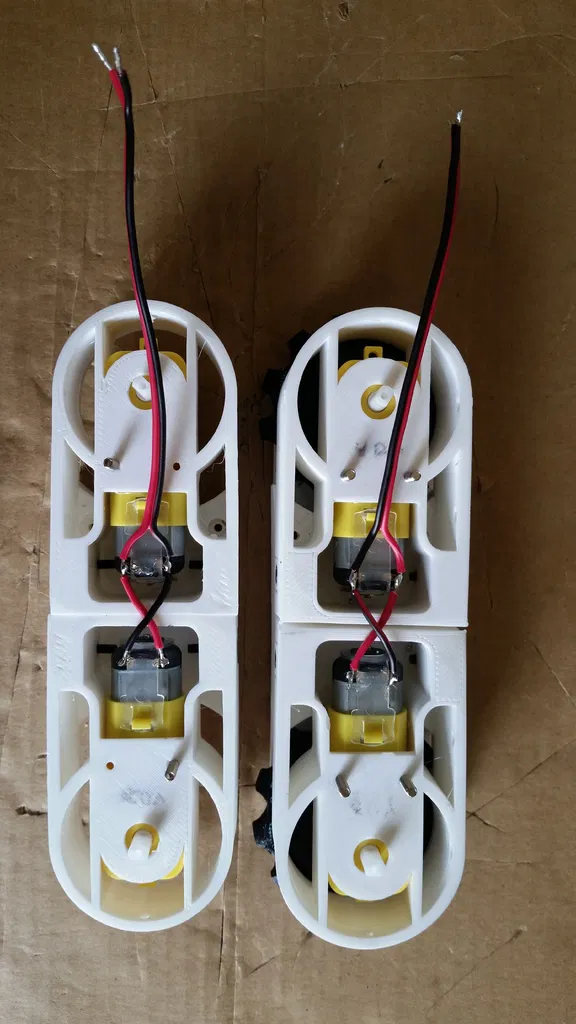
- Trong video này, bạn có thể xem chi tiết cách lắp một khung xích (Một bên của robot)
LƯU Ý: Vui lòng cho tôi biết nếu bạn gặp sự cố với bất kỳ bộ phận nào, và nếu bạn muốn tôi tạo một khối cụ thể cho bất kỳ phần cứng nào mà bạn nghĩ có thể hữu ích.
Mô tả tệp
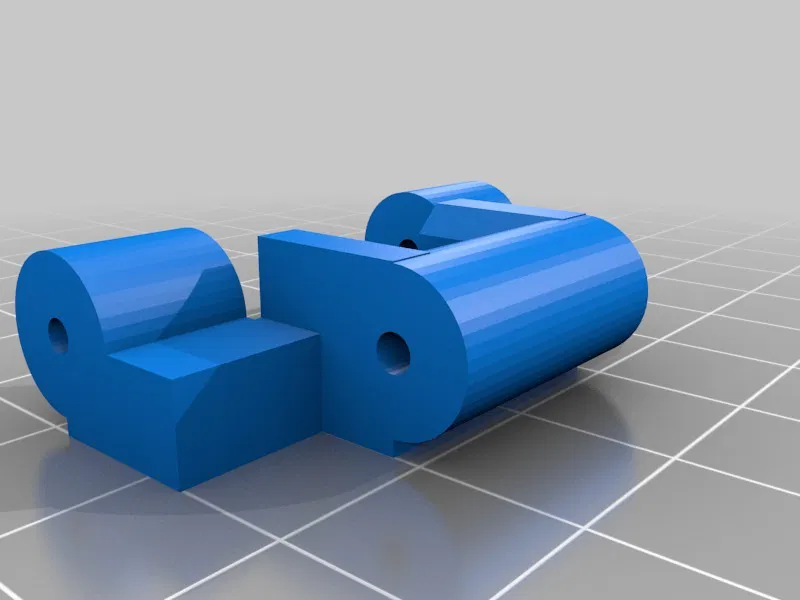
InnerTrackFrame - DCMotor v0.3.stl
- Đây là khối giữ loại động cơ DC này.
- Bạn cần 4 cái.
CenterTrackFrame v0.3.stl
- Là khối dùng để giữ hai InnerTrackFrames lại với nhau
- Bạn cần 2 cái.
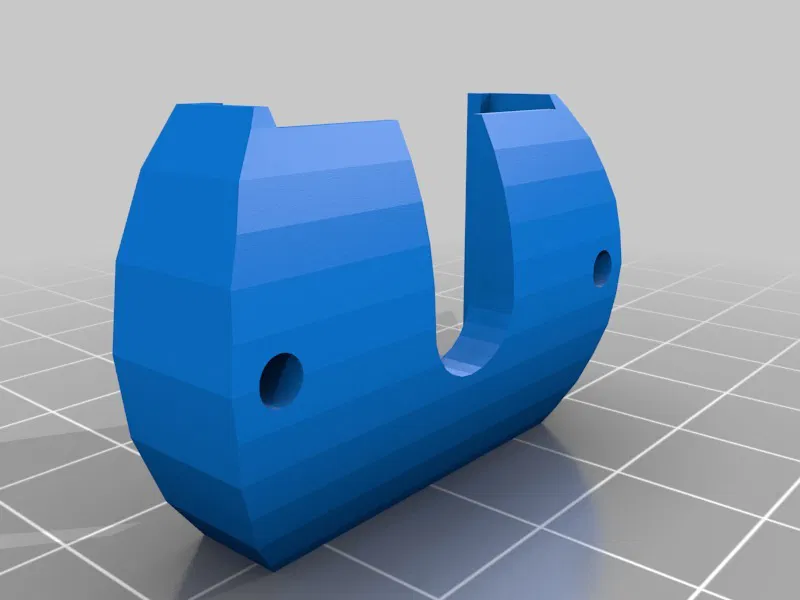
OuterTrackFrame v0.3 .stl
- _Khối này gắn vào CenterTrackFrame và che một bánh xe
- Bạn cần 4 cái.
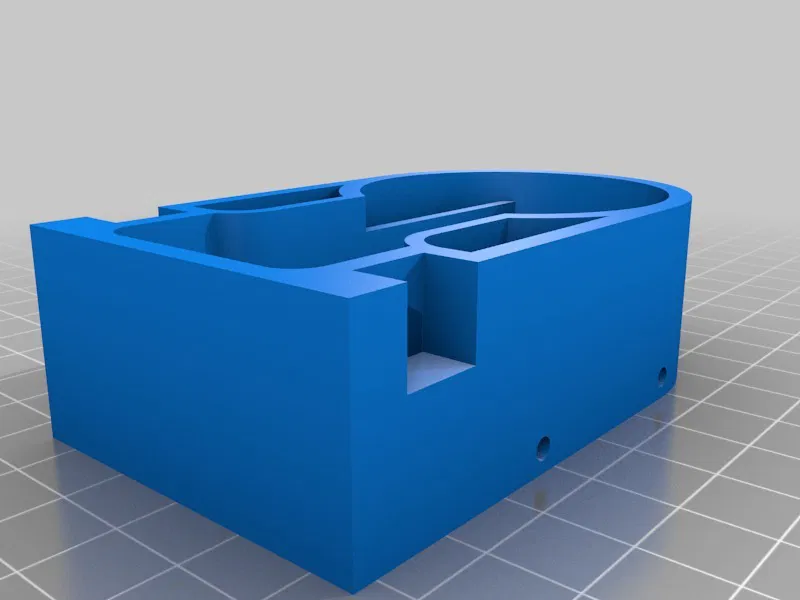
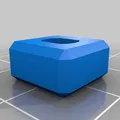
Shell - Blank v0.2.stl
- Khối này gắn vào InnerTrackFrames. Đây là mặt trước và/hoặc mặt sau của rover
- Bạn cần 2 khối Vỏ thuộc bất kỳ loại nào.
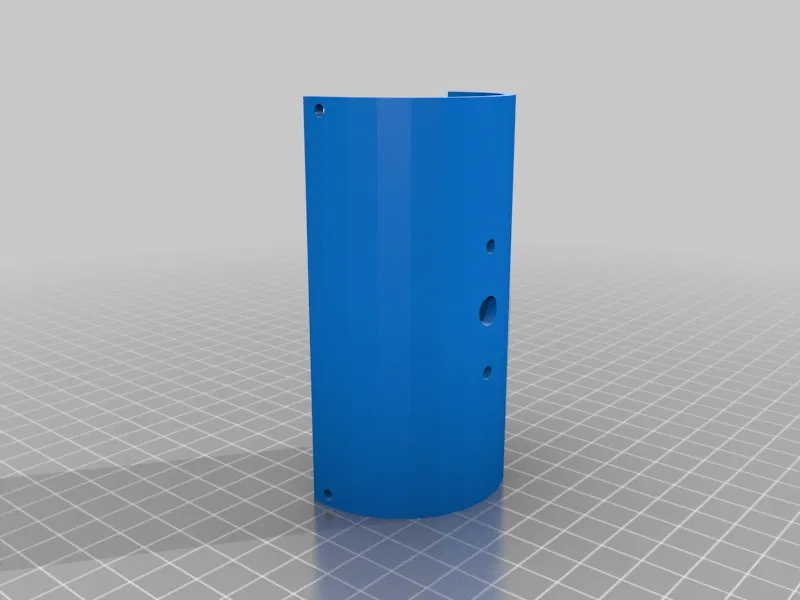
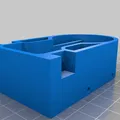
Shell - Switch v0.1.stl
- Khối này gắn vào InnerTrackFrames. Đây là mặt trước và/hoặc mặt sau của rover
- Nó được thiết kế để chứa loại công tắc này, để điều khiển nguồn điện cho rover của bạn
- Bạn cần 2 khối Vỏ thuộc bất kỳ loại nào.
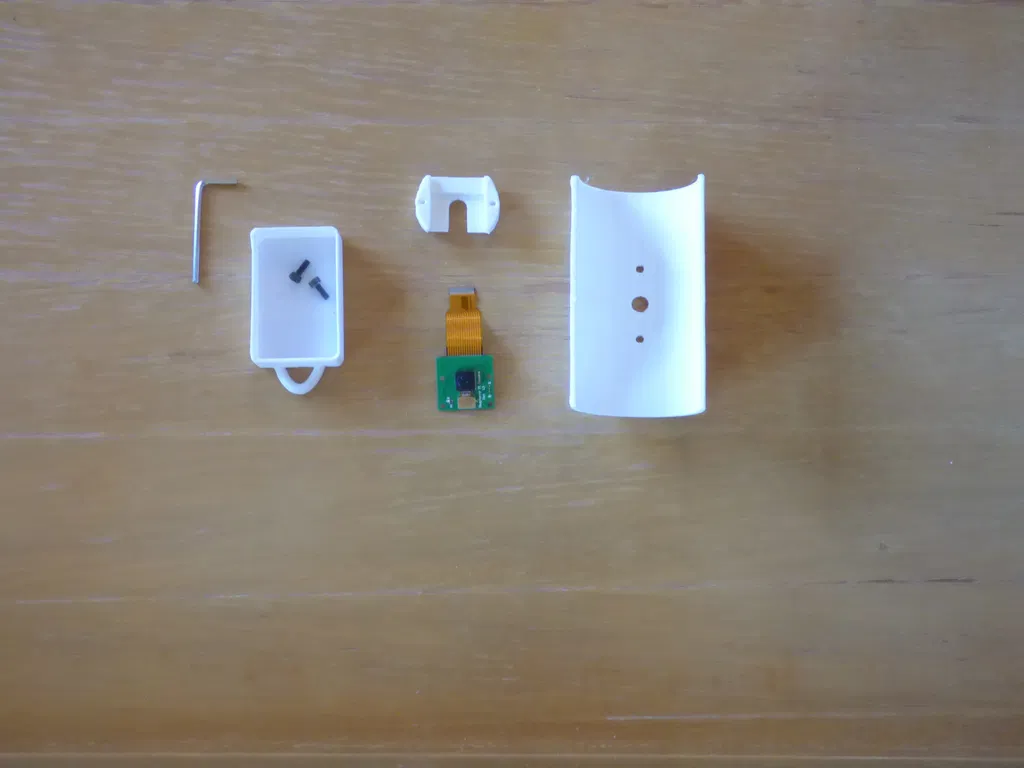
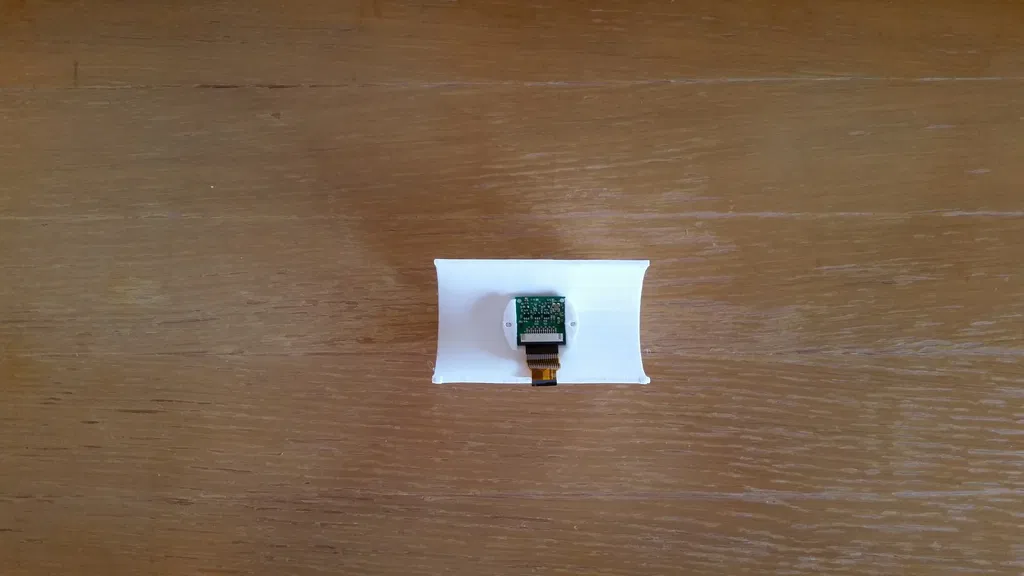
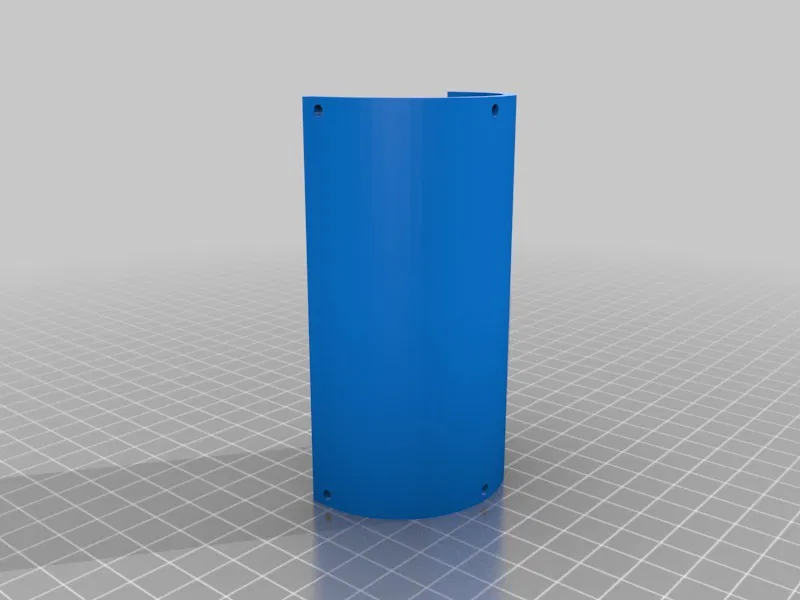
Shell - RPi Camerav0.3.stl
- Khối này gắn vào InnerTrackFrames. Đây là mặt trước và/hoặc mặt sau của rover
- Nó được thiết kế để chứa mô-đun camera Raspberry Pi
- Bạn cần 2 khối Vỏ thuộc bất kỳ loại nào.
Shell - RPi Camera Support v0.3.stl
- Khối này gắn vào bên trong Shell - RPi Camera
- Bạn chỉ cần nó nếu bạn cũng đang in Shell - RPi Camera.
Track v0.1.stl
- Khối này là một mắt xích của dây chuyền.
- Bạn cần in 27 cái mỗi bên (tổng cộng 54 cái)
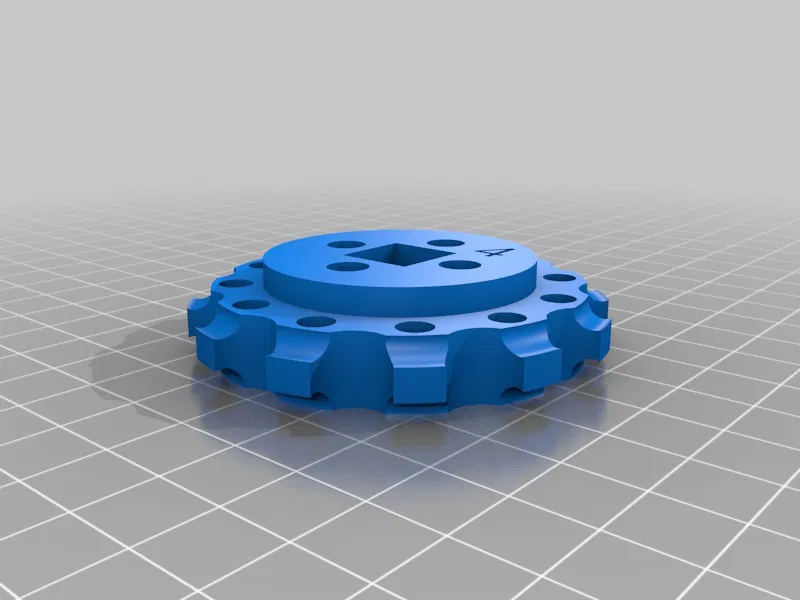
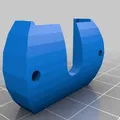
Cog - Drive v0.1.stl
- Khối này làm cho dây chuyền chuyển động
- Bạn cần 4 cái.
Spindle - DC Motor v0.3.stl
- Đây là thứ liên kết động cơ với Cog của nó
- Bạn cần 1 cái cho mỗi InnerTrackFrame - DCMotor bạn có (tổng cộng 4 cái)
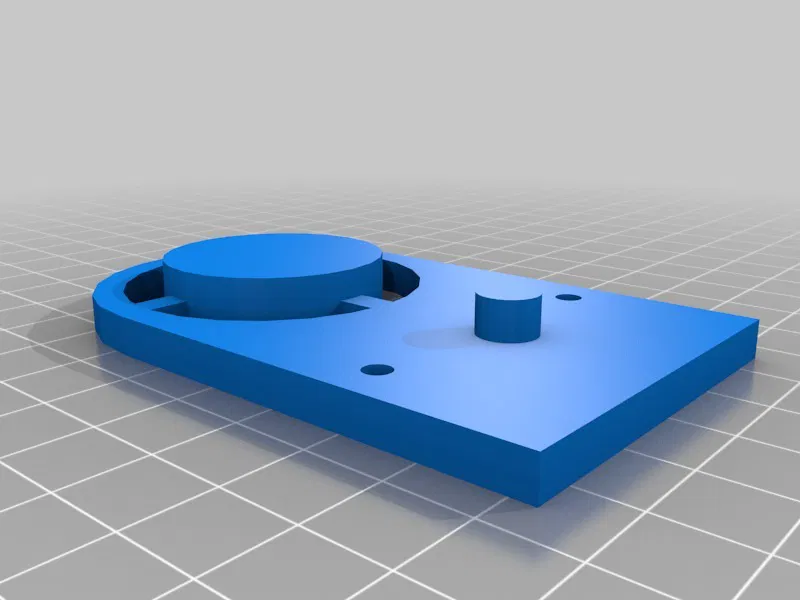
Cover - Blank - v3.stl
- Khối này hoạt động như đế hoặc nắp (trên hoặc dưới) của rover của bạn
- Bạn cần 2 khối Nắp tùy chọn.
LƯU Ý: Tôi sử dụng aaf.li để quản lý các liên kết liên kết của mình, điều này cho phép tôi:
- Sử dụng các liên kết ngắn hơn
- Thay đổi chúng ở một nơi nếu tôi thấy chúng bị hỏng
- Có một bảng điều khiển đẹp với số liệu thống kê về hiệu suất của chúng
- Và tất cả những điều này miễn phí
Cài đặt in
Máy in:
FLSun Mini Kossel
Rafts:
Không quan trọng
Supports:
Không quan trọng
Sau khi in
Vật liệu
Để lắp ráp rover này, bạn sẽ cần một số Vít M3. Tôi đã mua của mình từ đây. Tôi đã sử dụng M3x10, nhưng bạn có thể sử dụng loại ngắn hơn một chút. Tôi đã không sử dụng đai ốc, nhưng bạn có thể, nếu bạn thấy vít không đủ chắc chắn
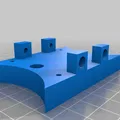
Điểm gắn InnerTrackFrame
Các khối này hỗ trợ động cơ và đóng vai trò là khung chính cho rover. Hiện tại tôi đã thiết kế một cho động cơ DC 6v, nhưng tôi đang lên kế hoạch tạo một cái khác dựa trên servo quay liên tục tiêu chuẩn như những cái này.
-
InnerTrackTrame - DC Motor
Khối này được thiết kế để hỗ trợ động cơ hộp số DC màu vàng không tên phổ biến. Bạn có thể tìm thấy chúng ở đây trên aliexpress.
Điểm gắn Vỏ
Các Vỏ là mặt trước và mặt sau của rover. Bạn có thể chọn khối vỏ phù hợp nhất với nhu cầu của mình. Dưới đây là danh sách các vỏ hiện có:
-
Shell - Blank
Như tên gọi, đây là một vỏ cơ bản, bạn có thể sử dụng nó nếu không muốn rover của mình có các lỗ mà bạn không sử dụng. 2. Shell - Raspberry Pi Cam
Vỏ này được thiết kế để chứa camera Raspberry Pi, nếu bạn có kế hoạch sử dụng, bạn có thể sử dụng khối này để gắn nó vào mặt trước của rover. Bạn có thể tìm thấy camera ở đây 3. Shell - Switch
Vỏ này được thiết kế để chứa một công tắc để bạn có thể bật/tắt rover của mình mà không cần sử dụng khu vực chính cho các thiết bị điện tử. Lỗ có đường kính 7mm, và được thiết kế cho công tắc bạn có thể tìm thấy ở đây.
Điểm gắn Nắp
Các Nắp là mặt trên và mặt dưới của rover. Bạn có thể chọn khối nắp phù hợp nhất với nhu cầu của mình. Dưới đây là danh sách các nắp hiện có:
-
Cover - Blank
Như tên gọi, đây là một khối nắp cơ bản, bạn có thể sử dụng nó nếu không muốn rover của mình có các lỗ mà bạn không sử dụng.
Danh mục: Robotics
Giấy phép

File mô hình












Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!