Tay cầm công thái học dựa trên nghiên cứu khoa học

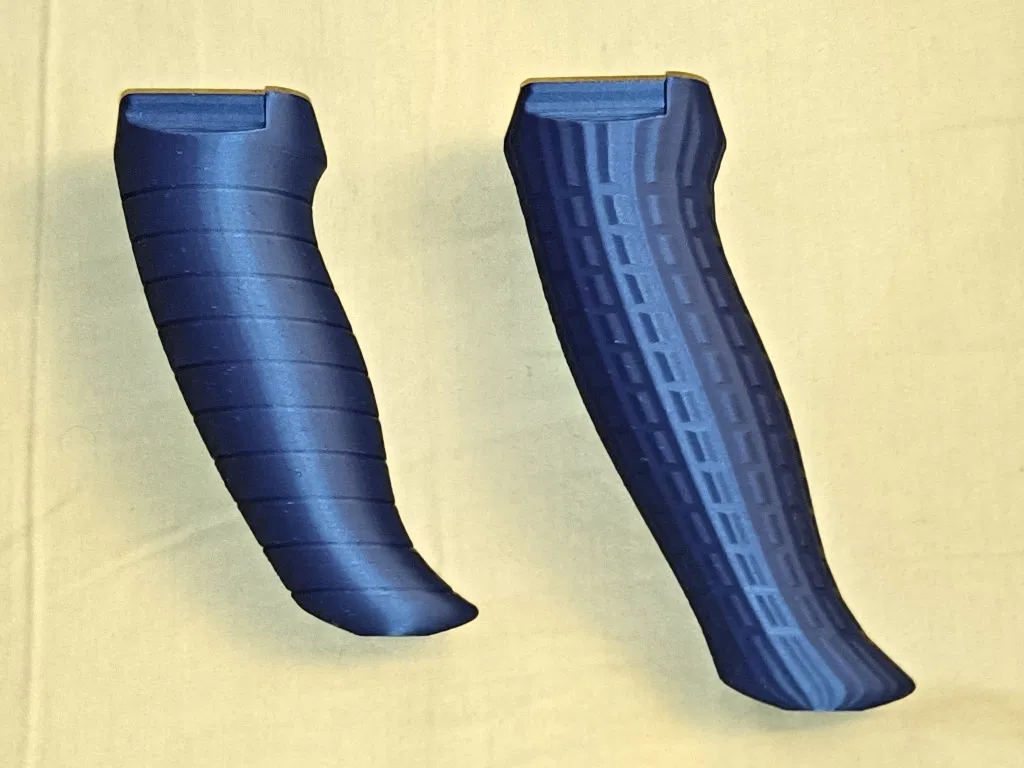
Thư viện OpenSCAD tạo tay cầm công thái học, phân phối áp lực lên tay đều nhất có thể, cho mọi kích cỡ tay. Kích thước dựa trên nghiên cứu nhân trắc học và dữ liệu đo đạc. Tùy chỉnh theo chiều dài và chiều rộng bàn tay. Phiên bản 5 có thêm rãnh ngón tay (không khuyến khích).







Mô tả
Đây là một thư viện OpenSCAD để tạo tay cầm công thái học, phân phối áp lực tiếp xúc lên tay đều nhất có thể, cho mọi kích cỡ tay.
Các kích thước trong mô hình này dựa trên nhiều bài báo nghiên cứu sử dụng dữ liệu nhân trắc học từ các quần thể khác nhau trên thế giới. Hồ sơ tay cầm dựa trên một nghiên cứu năm 2020, trong đó tay cầm nắm được đo bằng thước đo đường viền để rút ra các đường cong chính xác cho tay cầm công thái học.
Tất cả các nghiên cứu này đều được trích dẫn và liên kết trong bài viết blog của tôi "Bàn tay của ai là lớn nhất? Bạn có thể ngạc nhiên."
Tôi đã mở rộng nghiên cứu về đường viền tay cầm bằng cách tổng quát hóa nó để có thể mở rộng quy mô cho mọi kích cỡ tay. Biết rằng chiều cao tay cầm dựa trên chiều rộng xương bàn tay (chiều rộng bàn tay) và kích thước mặt cắt tay cầm dựa trên chiều dài bàn tay, người ta có thể tạo ra các yếu tố tỷ lệ dọc và ngang cho các điểm điều khiển đường cong được cung cấp trong nghiên cứu, và do đó có được một tay cầm được điều chỉnh tỷ lệ chính xác cho bất kỳ kích cỡ tay nào. Mô hình của tôi cũng tính toán chính xác sự mở rộng chiều rộng xương bàn tay khi các ngón tay ở vị trí nắm.
Nếu bạn muốn một tay cầm dài hơn, hãy chỉ định chiều rộng bàn tay lớn hơn. Nếu bạn muốn một tay cầm dày hơn, hãy chỉ định chiều dài bàn tay dài hơn.
Cập nhật: Phiên bản 5 thêm các rãnh ngón tay, nhưng không khuyến khích vì chỉ một kích cỡ tay mới có thể cầm vừa vặn tay cầm.
Cách sử dụng
Đặt nó ở một vị trí có thể tìm kiếm, như cùng thư mục với tập lệnh của bạn, và gần đầu, đặt dòng này:
use <ergonomic_handle_v5.scad>Các module và mặc định
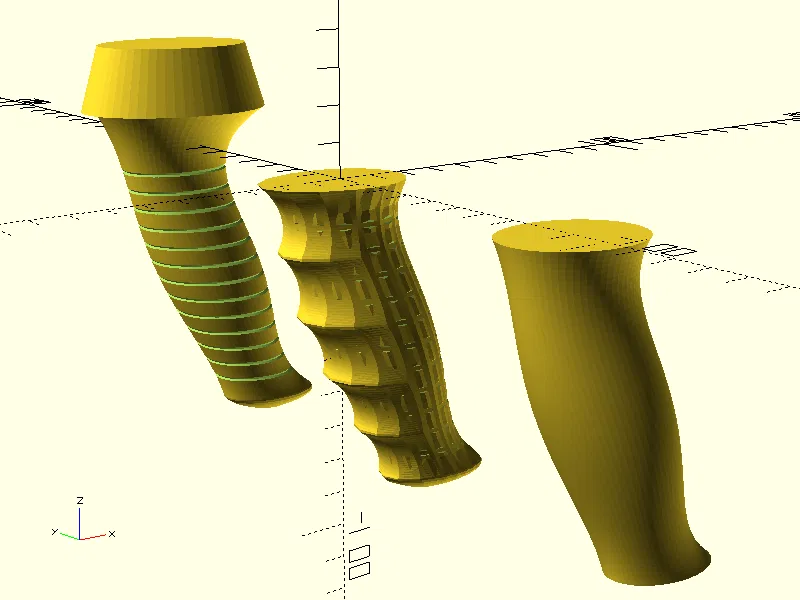
ergonomic_handle(hand_length=186, hand_width=85, flair=true, bottomcapext=0, topext=0, groovespc=0, tiltangle=110, fn=64, halfrotate=false);
Render phần thân của tay cầm công thái học. Tay cầm được định hướng sao cho bề mặt trên được đặt tại gốc tọa độ.
Các tham số:
hand_length= chiều dài bàn tay từ đầu ngón giữa đến nếp gấp đầu tiên ở cổ tay. Mặc định là cài đặtdefault_hand_length()(186 cho bàn tay nam trung bình).hand_width= chiều rộng xương bàn tay; chiều rộng của bốn ngón tay nơi chúng gặp lòng bàn tay. Mặc định là cài đặtdefault_hand_width()(85 cho bàn tay nam trung bình).flair= true để loe phần trên và dưới của cạnh trước, cho lực kéo tốt hơn. Khiflare=false, tay cầm được tạo như mô tả trong nghiên cứu được tham chiếu. Mặc định làtrue.bottomcapext= phần mở rộng nắp dưới. 0=đáy phẳng (mặc định). Đề xuất các giá trị từ 3 đến 8.topext= phần mở rộng phía trên, các đường cong được ngoại suy lên trên một lượng này. 0=không mở rộng (mặc định). Phần mở rộng nằm trên gốc tọa độ.groovespc= khoảng cách rãnh để cải thiện độ bám. 0=không có (mặc định). Đề xuất khoảng cách 6-10 mm. Rãnh rộng 1.2 mm và sâu 0.6 mm.fingergroove= rãnh ngón tay. false=không có rãnh ngón tay (mặc định). true=bao gồm (điều này sẽ vô hiệu hóagroovespc). Cảnh báo: Bật cài đặt này sẽ khiến tay cầm chỉ vừa vặn với bàn tay mà nó được định cỡ!tiltangle= góc nghiêng tay cầm. Nên đặt là 110° (mặc định). Không nên nhỏ hơn 90.fn= số lượng mặt phẳng (mặc định 64) trong mặt cắt elip cũng như các lát cắt dọc.halfrotate= có xoay các đỉnh đa giác một nửa đoạn xung quanh hình elip hay không (mặc định false). Chỉ hữu ích để xếp chồng hai tay cầm đa giác thấp cho các kết cấu thú vị (xem bản demo).
Các module hỗ trợ:
ergonomic_handle_top_ellipse(hand_length, hand_width, topext, tiltangle, fn);
Trả về một đa giác tương ứng với bề mặt trên của tay cầm (bao gồm cả phần mở rộng). Điều này hữu ích để thiết kế một cấu trúc phù hợp với phần trên của tay cầm.
Các tham số giống như được mô tả ở trên. Tất cả đều có giá trị mặc định nếu được bỏ qua.
ergonomic_handle_bottom_ellipse(hand_length, hand_width, tiltangle, fn);
Trả về một đa giác tương ứng với bề mặt dưới của tay cầm (không bao gồm phần mở rộng nắp dưới). Hữu ích khi không sử dụng nắp dưới và bạn muốn khớp thứ gì đó với đáy tay cầm.
Các tham số giống như được mô tả ở trên. Tất cả đều có giá trị mặc định nếu được bỏ qua.
Ngoài ra, ergonomic_handle_height(hand_width) có thể được sử dụng để lấy chiều cao của thân tay cầm cơ bản mà không có phần mở rộng. Điều này tương đương với hand_width*metacarpal_expansion.
Tay cầm được render với tâm trên tại gốc tọa độ. Đáy của tay cầm (không bao gồm phần mở rộng) cách gốc tọa độ ergonomic_handle_height() bên dưới.
Cài đặt in
Máy in: Prusa I3 MK3S
Hỗ trợ: Không
Lưới kit: 15% gyroid
Ghi chú:
Tay cầm nên được in úp ngược. Nó có thể sẽ cần hỗ trợ nếu bạn in nó đúng chiều. Tôi thường có một cấu trúc trên cùng có một số thanh trượt để một bộ phận khác có thể gắn vào.
Danh mục: Dụng cụ cầm tay
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!