Máy quét laser 3D Sardauscan dưới 30$ với phần mềm/hardware mở

Máy quét laser 3D Sardauscan giá dưới 30$, dựa trên phần cứng và phần mềm mở. Dễ dàng lắp ráp với Arduino, thích hợp cho các dự án DIY. Kích thước nhỏ gọn...






















Mô tả
*cập nhật
Hiệu chuẩn tiếng Pháp có sẵn trên github https://github.com/Sardau/Sardauscan
*cập nhật http://www.instructables.com/id/Build-a-30-laser/
tôi đã thêm một hướng dẫn để giải thích cách xây dựng, hiệu chuẩn và sử dụng sardauscan.*
cập nhật: V0.0.0.4 ra mắt : (nhiều) nhanh hơn tốt hơn mạnh mẽ hơn
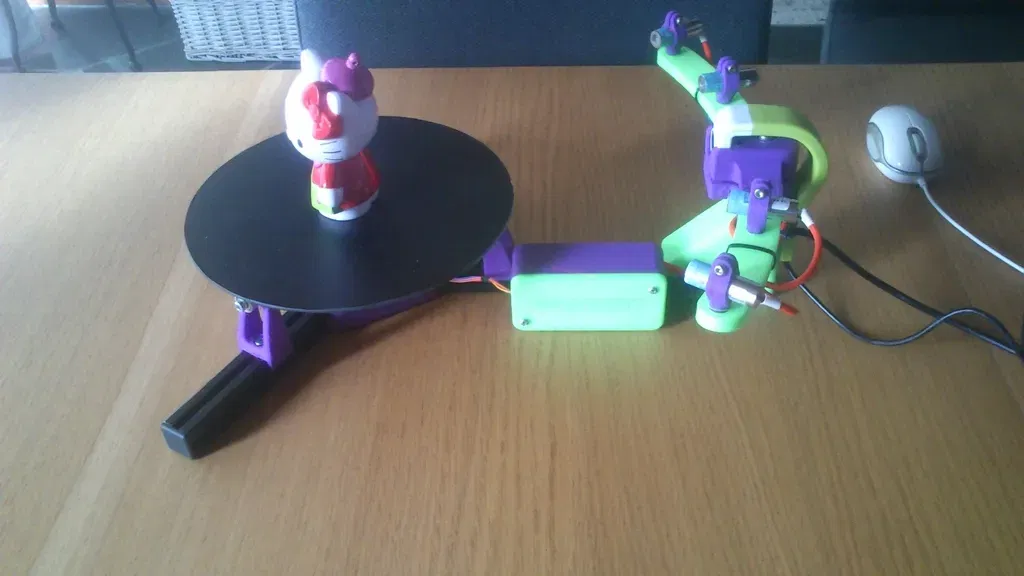
Sardauscan là một máy quét 3D laser nguồn mở dưới 30$ mà bạn có thể dễ dàng in tự làm.
Thậm chí chỉ 12$ nếu bạn đã có một hercule HD twist. Tôi nghĩ chúng ta có thể nói đây là "máy quét 3D rẻ nhất trên trái đất"
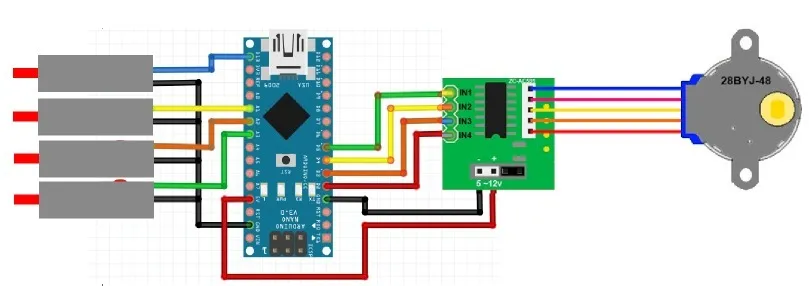
bạn chỉ cần một arduino nano, từ 1 đến 4 laser line và một bước động cơ vi mô có bánh răng (28BYJ-48)
(xem hướng dẫn cho BOM)
không cần nguồn bên ngoài. chỉ cần 2 cổng usb miễn phí trên máy tính của bạn: một cho webcam và cái còn lại cho phần còn lại.
*CẬP NHẬT*
Tôi tự hào thông báo với bạn về việc phát hành phần mềm mã nguồn mở cho “máy quét 3D rẻ nhất trên trái đất” Sardauscan DIY 30$.
Phần mềm được viết bằng C# và cho phép bạn tạo tác vụ quét của mình bằng cách kéo và thả.
Quy trình được khuyến nghị bao gồm các bước quét này
“Quét” => “Bộ lọc IrQ” => “hợp nhất laser” (nếu bạn sử dụng nhiều hơn một laser) => “Xây dựng lưới bằng nội suy” => “Lưu STL”.
Nhưng nếu bạn không hài lòng với tác vụ xử lý tích hợp sẵn, hoặc nếu bạn thích sử dụng một phần mềm nặng nhưng mạnh mẽ khác để làm việc với các đám mây điểm của bạn như meshlab hoặc cái khác,
bạn chỉ cần “Quét” => “Lưu Ply” và nhập chúng vào ứng dụng bạn ưa thích.
Trong khi phần mềm đi kèm với hỗ trợ xây dựng phần cứng Sardauscan và camera usb. Bạn có thể dễ dàng viết proxy phần cứng của riêng mình thông qua các plugin.
Bạn thậm chí có thể xây dựng tác vụ của riêng bạn để chèn vào quy trình quét của mình.
Mã nguồn : https://github.com/Sardau/Sardauscan
video quét thời gian thực : https://www.youtube.com/watch?v=TPb-gEVkBYo
xử lý hậu kỳ bắt đầu @ 1:50, nếu bạn muốn xem tốc độ xử lý hậu kỳ (mượt mà, tái tạo lưới, và tạo STL)
thảo luận tiếng Pháp : http://talk.smartfri.odns.fr/index.php?topic=368.0
Dự án
Giới thiệu
Nhìn vào giá cả và những hạn chế của các máy quét thương mại, tôi đã quyết định thử thách bản thân để xây dựng máy quét của riêng mình. Nó phải rẻ hơn và dễ dàng để bất kỳ ai cũng có thể tự xây dựng bằng cách sử dụng máy in 3D.
Kết quả
"Sardauscan" là một máy quét laser, so sánh với các máy quét laser chuyên nghiệp khác nhưng có giá thấp hơn 20-30 lần, và nó có số lượng laser gấp đôi.
Các nguyên tắc thiết kế của tôi là:
· Giữ cho nó đơn giản
· Giữ cho nó chi phí thấp
· Làm cho nó có thể phát triển
· Cung cấp một giải pháp hoàn chỉnh
Máy quét hoàn toàn mã nguồn mở và phần cứng mở:
· Phần mềm "Sardauscan" được viết bằng C# - mã nguồn đầy đủ có sẵn.
· Bạn có thể viết các plugin cho phần cứng của riêng bạn hoặc cho các tác vụ của bạn.
Phần mềm cho phép bạn quét, làm mịn, xây dựng lưới và xuất sang nhiều định dạng khác nhau.
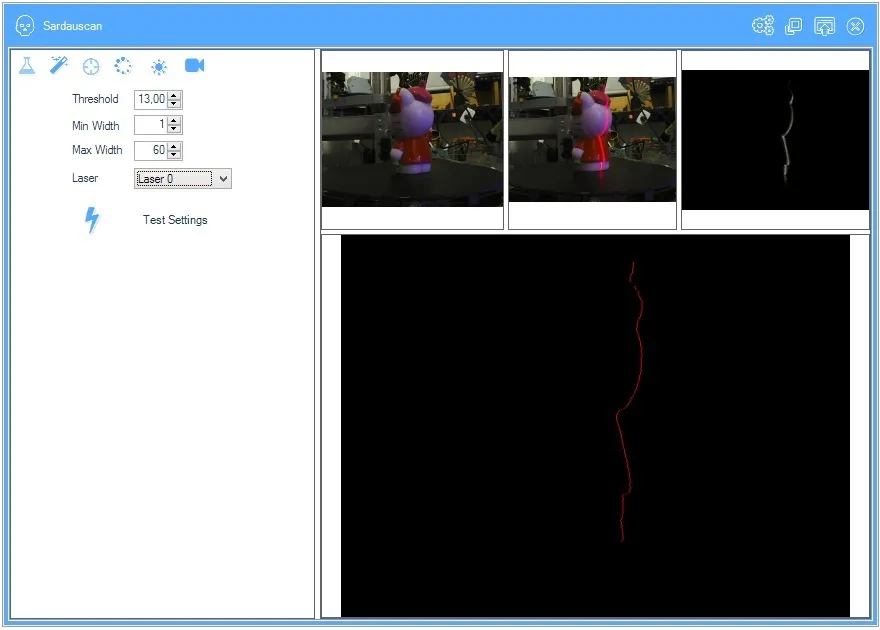
Nó hoạt động như thế nào?
Nguyên tắc của một máy quét laser 3D rất đơn giản.
· Một bức ảnh của đối tượng được chụp mà không có laser nào được bật
· Một laser được bật và một bức ảnh khác được chụp
· Tính toán sự khác biệt giữa hai hình ảnh, một dấu vết laser (hồ sơ của đối tượng) được thu được
· Bằng cách biết vị trí của camera và laser, bạn có thể suy ra tọa độ 3D của tất cả các điểm trên hồ sơ
· Bạn làm tương tự cho tất cả các laser, xoay bàn và lặp lại quá trình cho đến khi bàn đã quay một vòng đầy đủ
Và đó là bạn có một đám mây điểm hoàn chỉnh đại diện cho đối tượng của bạn.
Bạn cần gì?
· Một đống M3 (16 và 20 mm)
· Một đống M4 (12 và 20 mm)
· 1x Arduino nano (bản sao Trung Quốc, $4) http://www.befr.ebay.be/itm/NEW-Nano-V3-0-ATmega32...
· 1x Motor bước Trung Quốc (28BYJ-48) và bộ điều khiển (ULN2003) (5$) http://www.befr.ebay.be/itm/Uln2003-Stepper-Motor...
· 1-4x Laser dòng 5v ($2.5$ cái) http://www.befr.ebay.be/itm/251688838898?ssPageNa...
· 1x Hercule HD Twist ($15) http://www.befr.ebay.be/itm/Hercules-HD-Twist-5-0...
· 20x20 profile (có thể in: có nhiều STLs trên mạng)
· tùy chọn 3x con lăn 4mm ($0.3 cái) (624 bearings
Tổng: từ $26.5 (1 laser) đến $35 (4 lasers)
Về chiều dài 2020: điều này không thực sự quan trọng. Rào cản duy nhất là đảm bảo camera nhìn thấy toàn bộ bàn.
Ví dụ, đây là các chiều dài tôi đã sử dụng cho công trình của mình:
· 2 x 140mm
· 1 x 120mm
· 1 x 250mm
Những gì cần in
Tất cả các tệp STL có thể được tìm thấy trên Thingiverse:
http://www.thingiverse.com/thing:702470
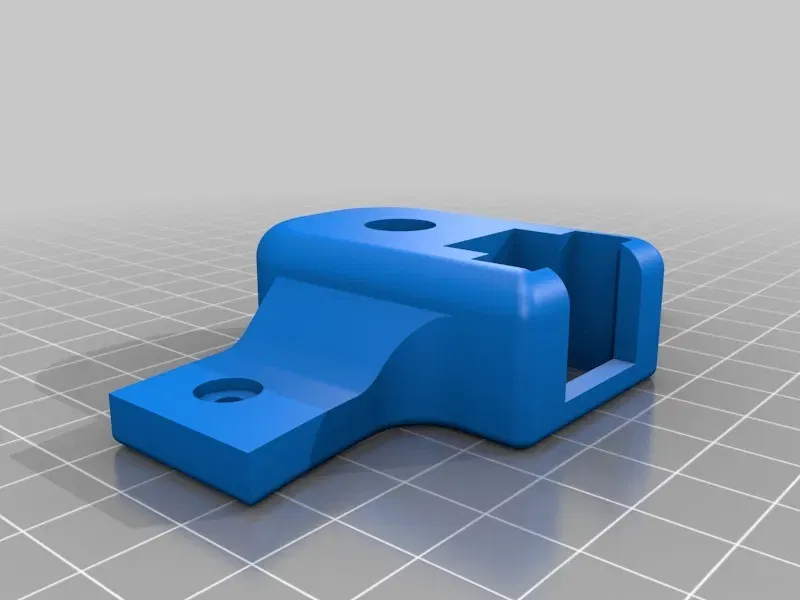
· 1 x arm_left.stl
· 1x box.stl
· 1x box_door.stl
· 1x box_arduino_clamp.stl
· 1x arm_right.stl
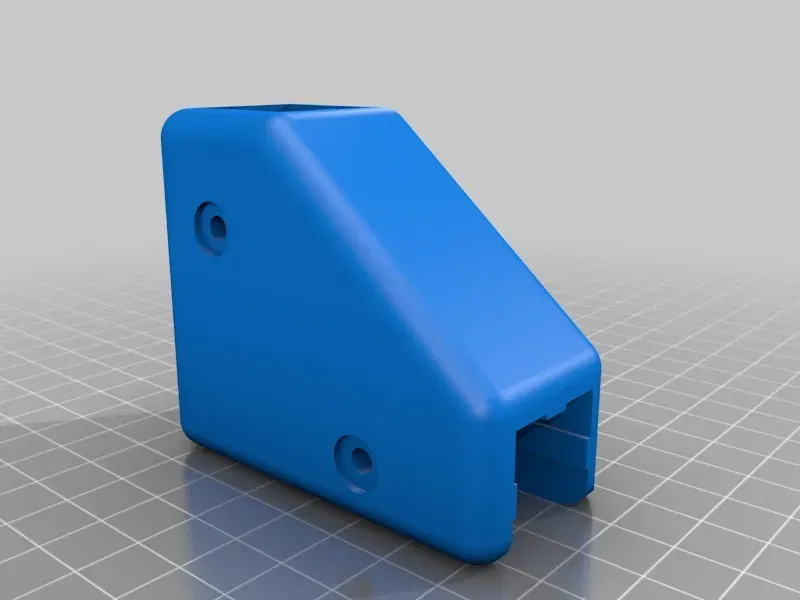
· 1x CORNER.stl
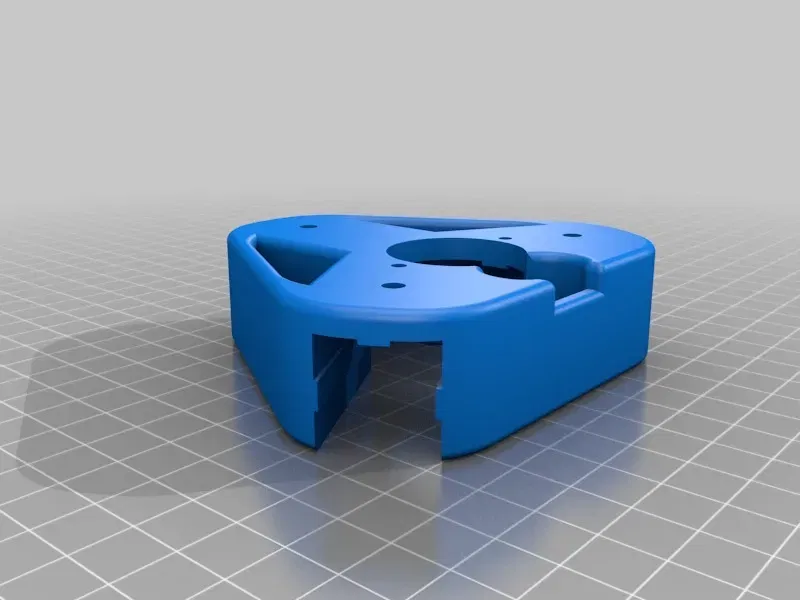
· 1x MOTOR_MOUNT.stl
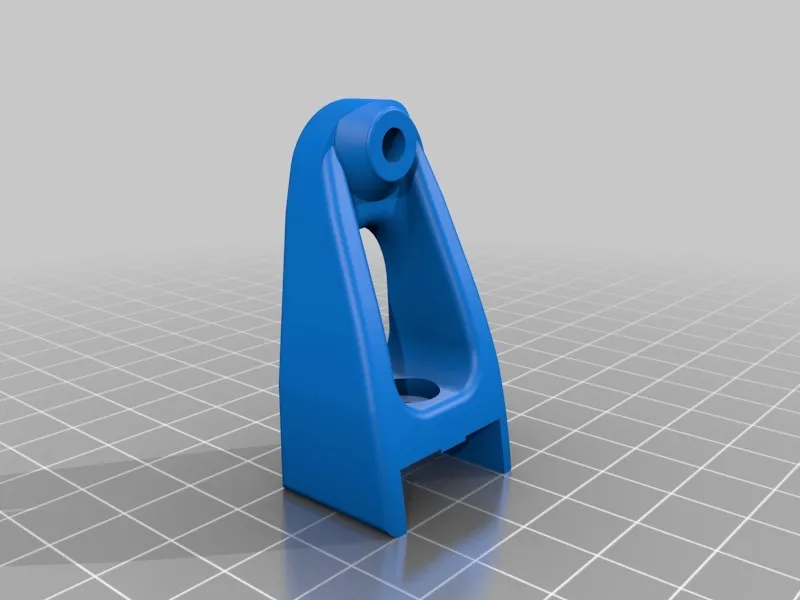
· 1 đến 4 x laser_holder.stl
· 1X Camera_HOLDER_LOWER_PART.stl
· 1x Camera_HOLDER_UPPER_PART.stl
· 1x center_axe_MINIMAL.stl HOẶC 1x table_AXLE.stl (TÙY CHỌN)
· 3x roller_baseV2.stl
· bạn có thể in 12x M4_tslot_nut.stl nếu bạn sử dụng profile 20x20 và bạn không có bất kỳ cái nào
Ghi chú:
· Các profile 2020 chỉ ở đây để dễ sử dụng. Bạn có thể sử dụng bất cứ thứ gì bạn có: gỗ, kim loại, …
· Nếu bạn muốn sử dụng một camera khác, bạn sẽ cần điều chỉnh “Camera_HOLDER_UPPER_PART” để phù hợp với nó
· Vòng bi là tùy chọn. Chúng chỉ cần thiết nếu bạn muốn quét các vật nặng hoặc không có bàn hoàn toàn phẳng
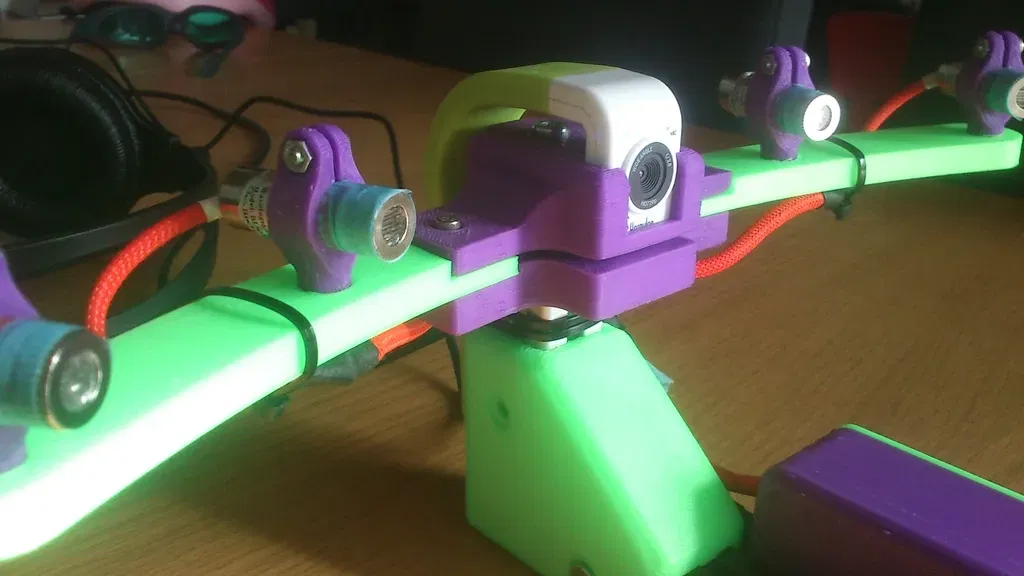
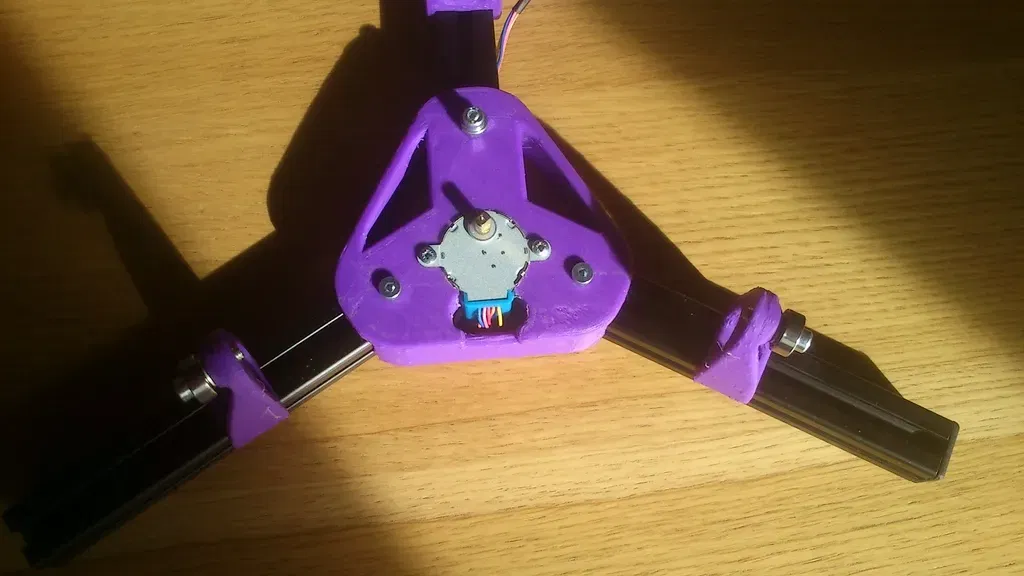
· Việc xây dựng rất đơn giản, chỉ cần nhìn vào hình ảnh. Bạn không thể làm sai
· Đặt động cơ ở giữa, đặt 3 profile xung quanh và vặn chúng lại. Đặt góc, vặn, đặt các cánh tay, vặn, …
· Có một lỗ cho mỗi con ốc, bạn không thể làm sai.
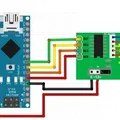
· Đối với việc đi dây, vui lòng tham khảo sơ đồ.
Firmware
Tại thời điểm này, tất cả những gì bạn cần để hoàn thành phần phần cứng là tải firmware lên Arduino. Bạn sẽ cần Arduino IDE hoặc một trình soạn thảo sketch khác.
Firmware (một sketch Arduino thông thường) có sẵn tại: https://github.com/Sardau/Sardauscan
Bạn cũng sẽ cần cài đặt thư viện AccelStepper để biên dịch nó: https://github.com/adafruit/AccelStepper
· Chỉnh sửa configuration.h để phù hợp với việc đi dây của bạn.
· Tải nó lên Arduino của bạn.
Bây giờ phần cứng đã sẵn sàng, hãy thử nghiệm nó!
· Kết nối với Arduino của bạn bằng IDE
· Gõ “Sardauscan” – Arduino sẽ trả lời “yes”
· Thử động cơ bước: gõ “T R 100” – bàn của bạn sẽ quay 100 bước
· Thử laser: gõ “L 0 1” để laser đầu tiên (0) bắn (1) – laser đầu tiên sẽ sáng lên
Nếu có điều gì đó không hoạt động, hãy kiểm tra dây nối và configuration.h – nó phải khớp.
Phần mềm và Hiệu chuẩn
Để cài đặt phần mềm Sardauscan, hãy truy cập github (xem liên kết ở trên) và tải phiên bản nhị phân mới nhất về. Giải nén nó và khởi động tệp thực thi.
Trong giao diện chính, bạn sẽ thấy 3 biểu tượng màu đỏ – một cho bàn, một cho laser và một cho camera. Nhấp vào chúng để kết nối với phần cứng (nhấp chuột phải để ngắt kết nối).
Nếu bạn sử dụng firmware tiêu chuẩn của Sardauscan, bàn và công tắc laser sẽ được liên kết.
Bây giờ phần cứng đã sẵn sàng và phần mềm kết nối với nó, đây là phần khó khăn: hiệu chuẩn.
Việc hiệu chuẩn bao gồm 3 bước:
· Một hiệu chuẩn thủ công
· Kích thước xây dựng
· Sự điều chỉnh "Adjust"
Hãy cẩn thận trong quá trình hiệu chuẩn: chất lượng kết quả phụ thuộc trực tiếp vào nó.
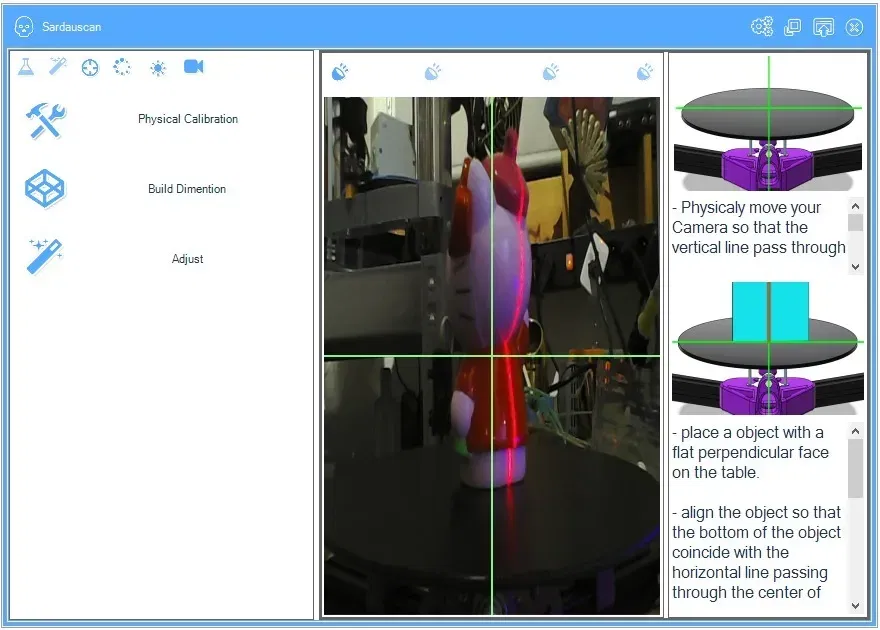
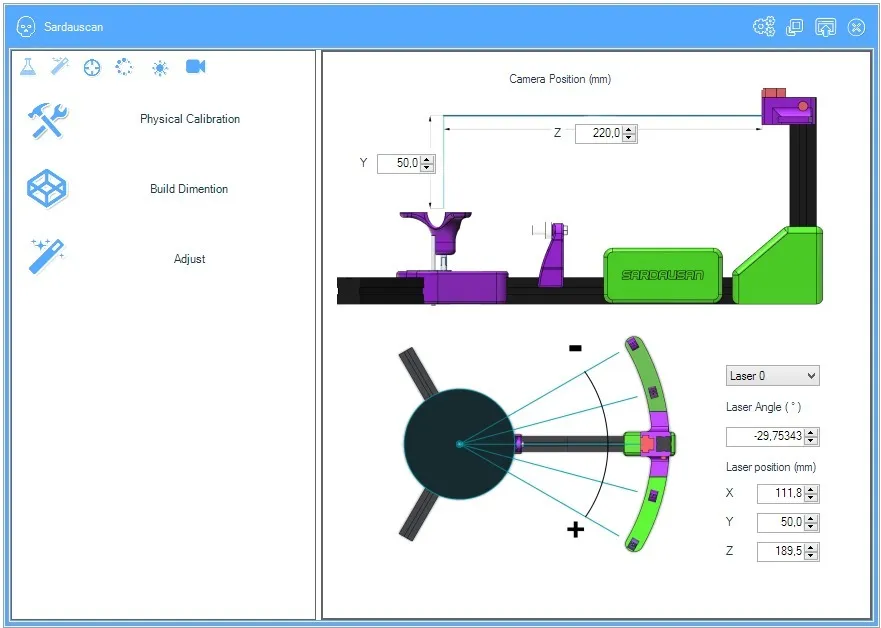
Để hiệu chuẩn:
· Nhấp vào biểu tượng mục tiêu và nút ‘Physical’.
· Di chuyển camera của bạn sao cho đường thẳng đứng trong cửa sổ xem trước cắt ngang chính giữa bàn.
· Nhấp vào giữa bàn trong cửa sổ xem trước. Các đường sẽ giúp bạn căn chỉnh đối tượng hiệu chuẩn.
· Đặt đối tượng hiệu chuẩn (xem STL trên Thingiverse) lên bàn, mặt phẳng hướng về camera – sử dụng đường ngang để hỗ trợ.
· Nhấp vào biểu tượng laser đầu tiên ở trên cùng để bật laser đầu tiên. Căn chỉnh đường laser với đường thẳng đứng trong cửa sổ xem trước.
· Lặp lại cho tất cả các laser của bạn.
Kích thước xây dựng:
· Nhấp vào nút “build dimension” và nhập kích thước xây dựng của bạn.
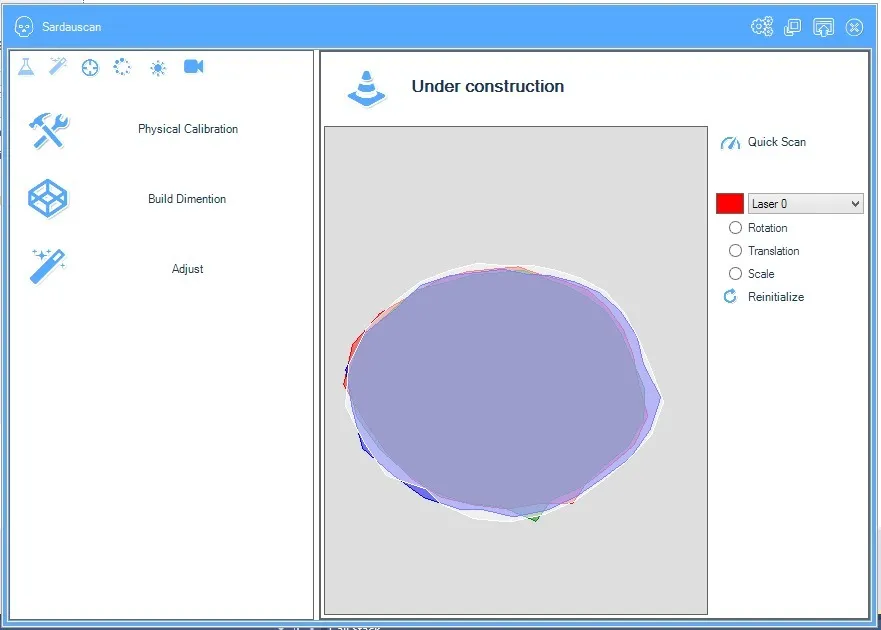
Điều chỉnh:
· Vì việc hiệu chỉnh hoàn hảo rất khó đạt được, đặc biệt là với số lượng laser lớn hơn, bước hiệu chỉnh sẽ giúp bạn sửa chữa các lỗi trước đó.
· Đặt đối tượng hiệu chỉnh của bạn ở giữa bàn và nhấn "quét nhanh".
· Khi quá trình quét hoàn tất, bạn sẽ thấy một cái nhìn từ trên xuống. Mỗi màu sắc tương ứng với một laser khác nhau.
· Mục tiêu là chồng chéo các quét laser khác nhau một cách tốt nhất có thể: chọn một laser trong hộp kết hợp và xoay (chuột trái), thay đổi kích thước (chuột giữa) và di chuyển (chuột phải) quét.
Chúc mừng, việc hiệu chỉnh của bạn đã hoàn tất!
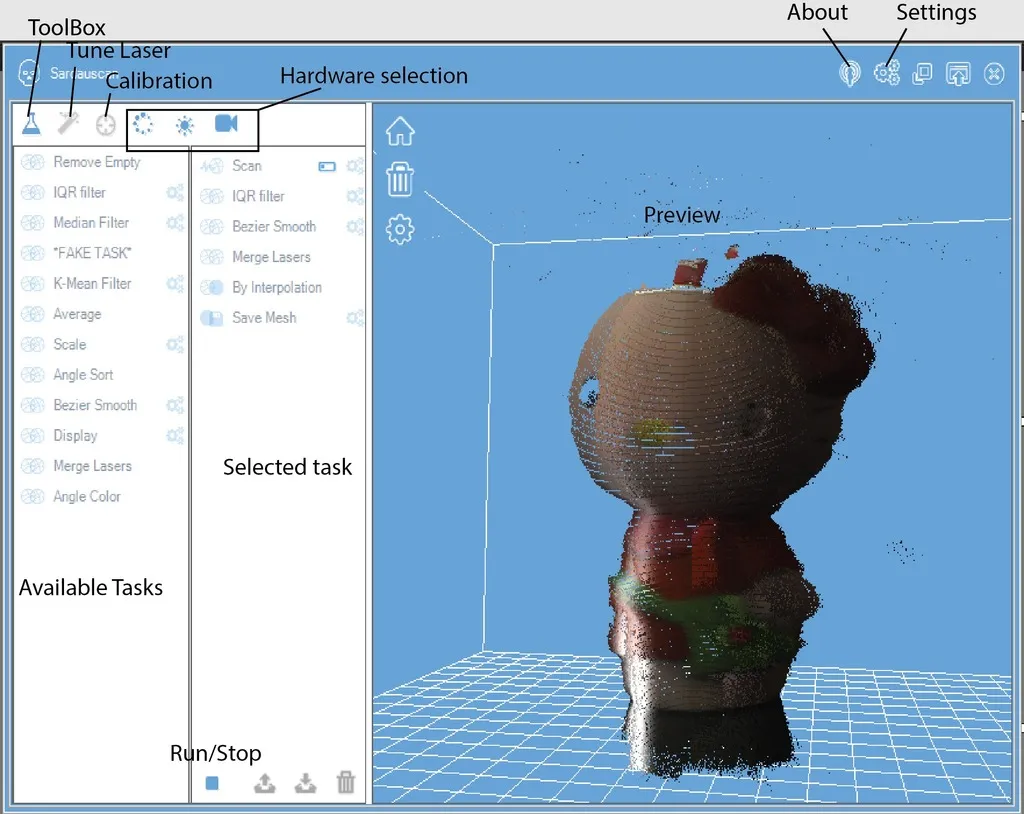
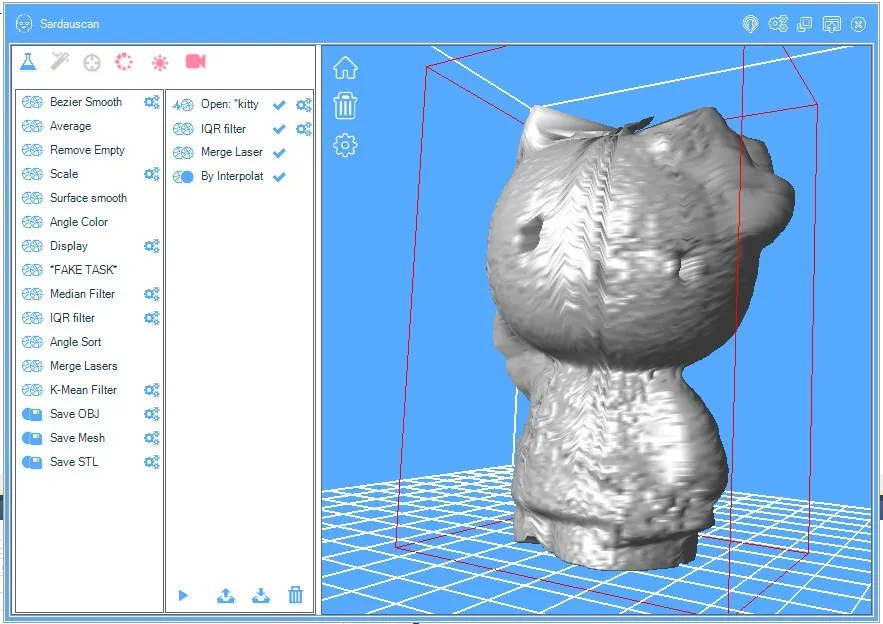
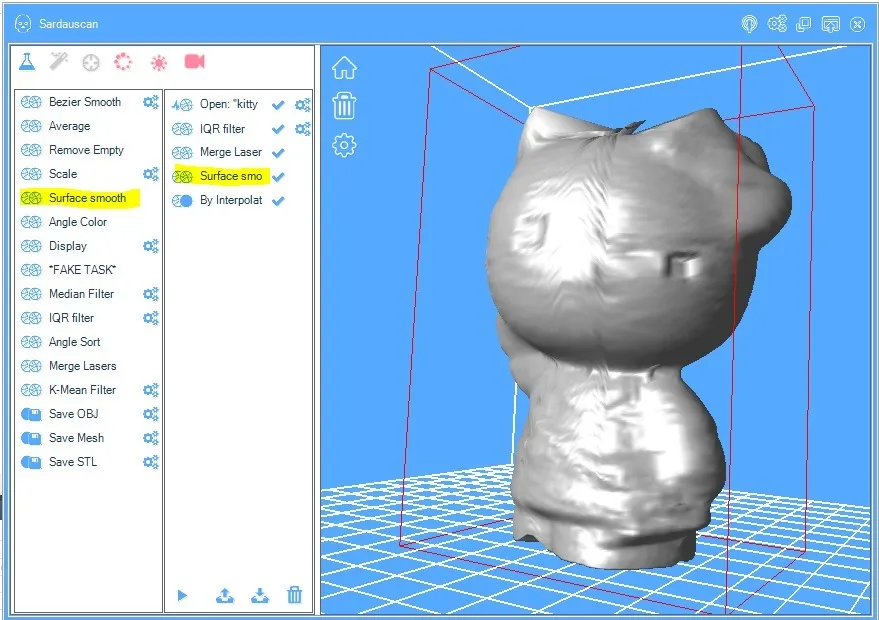
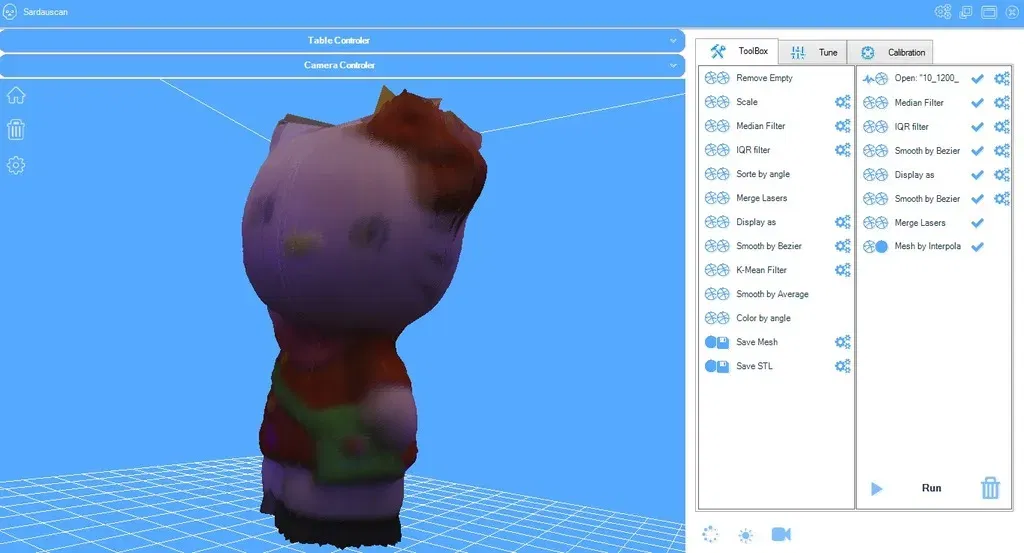
Đây là giao diện gì vậy?
Để có thể phát triển, phần mềm được thiết kế xung quanh các nhiệm vụ và quy trình.
Khi bạn mở chương trình, bạn sẽ thấy bên trái là danh sách các nhiệm vụ có sẵn – bạn có thể kéo chúng vào danh sách quy trình bên phải rồi nhấn biểu tượng 'Chạy' ở dưới cùng.
Dưới đây là danh sách không đầy đủ các nhiệm vụ có sẵn:
· Quét: quét một đối tượng
· Chụp hình: chụp hình đối tượng để sử dụng trong chương trình photogrammetry
· Lọc IQR: loại bỏ tiếng ồn từ dữ liệu bằng bộ lọc khoảng tứ phân
· Lọc trung vị: loại bỏ tiếng ồn từ dữ liệu bằng bộ lọc trung vị
· Góc: hợp nhất quét laser theo góc – làm mượt quét và lọc tiếng ồn
· Bezier: làm mượt dữ liệu bằng cách phù hợp với một đường cong Bezier
· Bề mặt: làm mượt dữ liệu với bề mặt Laplace
· Lưu ply: lưu tệp PLY để sử dụng với MeshLab hoặc bất kỳ phần mềm đám mây điểm nào khác
· Lưu stl: lưu tệp STL
Góc phát triển: Tiến hóa? Phần cứng riêng? Plugins?
Như đã đề cập, phần mềm không liên kết với bản dựng Sardauscan – nó được thiết kế để phát triển.
Bạn có thể làm gần như bất cứ điều gì bạn muốn với các plugin.
Bạn có một thuật toán kỳ diệu?
Hãy tạo một plugin cho nó!
Bạn có phần cứng thu thập hình ảnh tùy chỉnh?
Hãy tạo một plugin!
Bạn muốn sử dụng firmware phần cứng của riêng bạn cho bàn hoặc laser?
Hãy tạo một plugin!
Bạn có thể xem kho lưu trữ github, có một số mẫu plugin. Thật sự rất đơn giản để lập trình.
Để sử dụng plugin, chỉ cần sao chép nó vào thư mục con "plugin".
Chúc bạn quét vui vẻ!
Danh mục: In 3D
Giấy phép

File mô hình
















Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!