Voron V2.4 và Trident: Bản sửa đổi di dời điểm dừng cuối Y
Tìm hiểu cách di dời điểm dừng cuối Y trên máy in Voron V2.4 và Trident bằng bản sửa đổi đơn giản này. Giải pháp thay thế cho các dây cáp cũ, yêu cầu ít bộ phận và không sửa đổi các bộ phận hiện có. Bao gồm hướng dẫn in và lắp ráp chi tiết.

Mô tả
Tôi đã nâng cấp Voron V2.4 của mình với CAN-toolboard. Để thay thế hoàn toàn các dây cáp x và y, cần phải di chuyển các điểm dừng cuối X và Y. Đối với X, có một giá đỡ ở phía sau của xe đầu nối. Đối với Y, thông thường sẽ di chuyển điểm dừng cuối đến giá đỡ động cơ B (vị trí phía sau bên phải).
Có một số bản sửa lỗi di dời. Chúng yêu cầu phải xây dựng lại hoàn toàn giá đỡ động cơ B, hoặc chúng tốn không gian xây dựng ở Y.
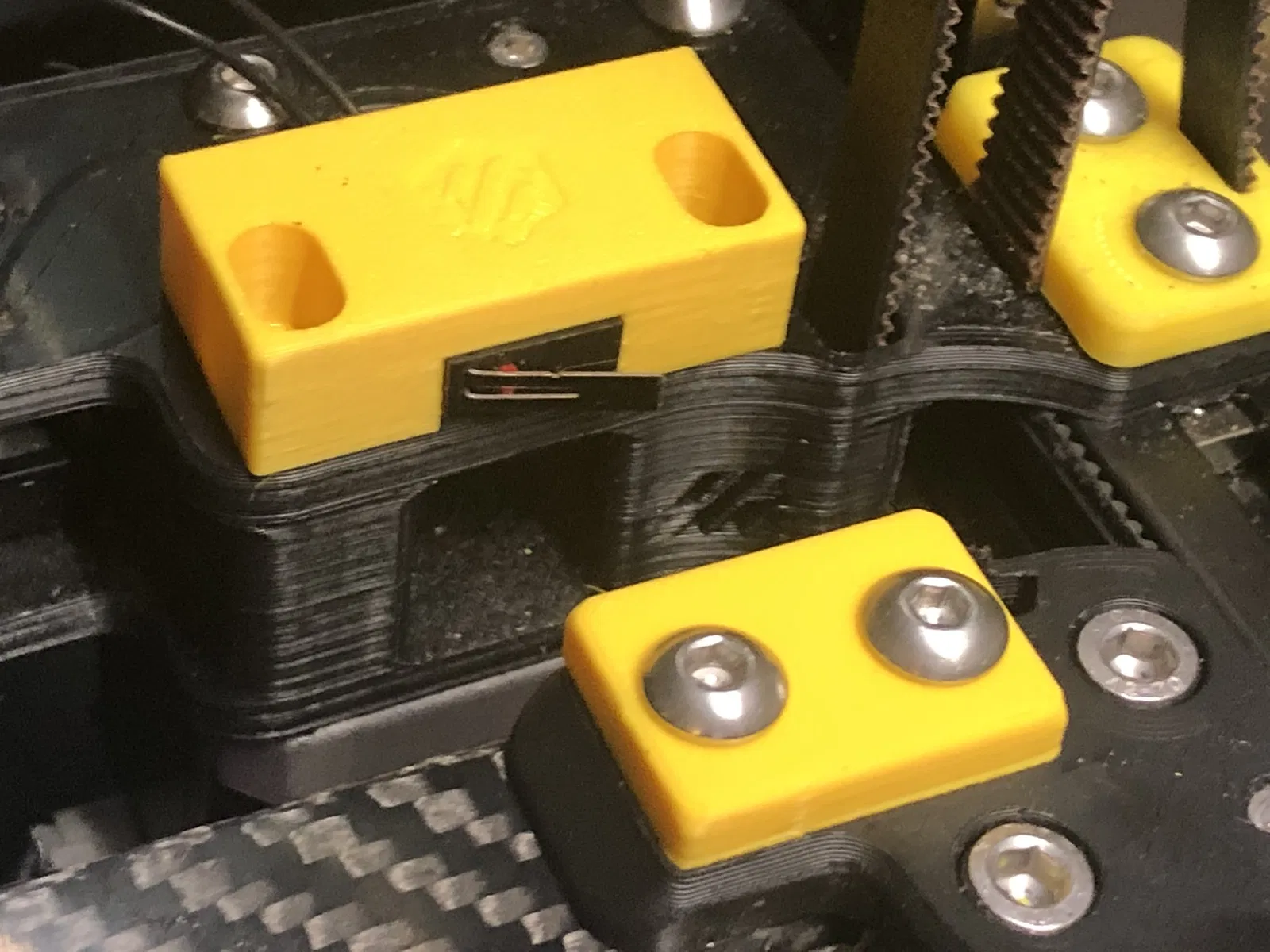
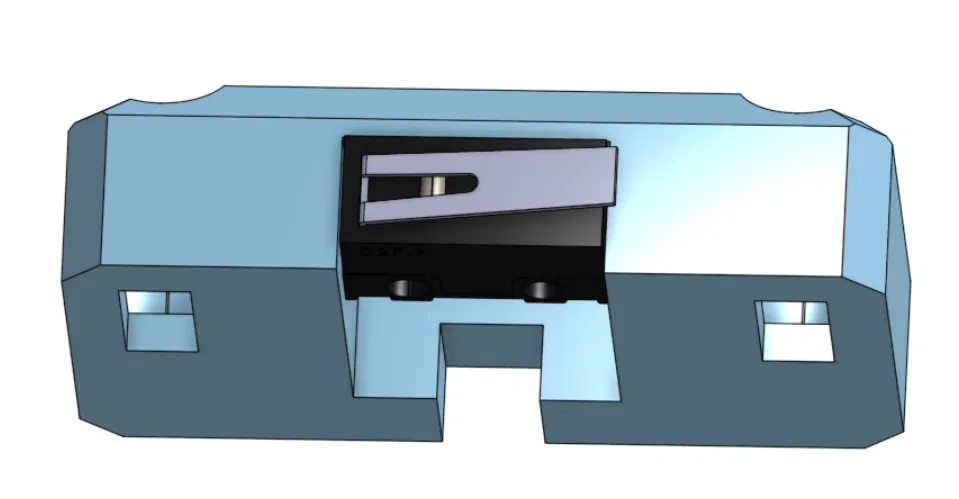
Bản sửa lỗi này được bắt vít vào bộ phận chứa động cơ thông thường. Bạn cần hai vít dài hơn M3x35 cho động cơ và 2 vít tự khai thác M2x10. Không có sửa đổi nào đối với các bộ phận hiện có.
Cập nhật ngày 25.12.23: Một số vít M2x10 có đầu dày hơn, vì vậy tôi đã thêm một phiên bản có thêm 1mm không gian.
BOM:
Công tắc vi mô, ví dụ: Omron D2F-5L ("L" là quan trọng, đó là kiểu chốt lò xo)
2x vít tự khai thác M2x10 để cố định công tắc vi mô
2x vít M3x35 để cố định giá đỡ điểm dừng cuối trên cổng kết nối
Hướng dẫn in:
Cài đặt Voron tiêu chuẩn, 3-4 lớp bao quanh, khoảng 25% vật liệu độn
Các bộ phận được định hướng ở vị trí in tốt nhất
Sử dụng ABS hoặc tốt hơn, đây là một chiếc Voron, chúng nóng lên :)
Lắp ráp:
- Hàn dây vào điểm dừng cuối. Sử dụng hai chân ngoài cùng, không kết nối bất cứ điều gì với chân giữa. Nếu bạn không chắc chắn về điều này, hãy kiểm tra hướng dẫn V2.4/Trident, có hướng dẫn về cách đấu dây cho các công tắc điểm dừng cuối x và y. Không thay đổi thủ tục đó.
- Sử dụng 2 vít tự khai thác M2x10 để cố định công tắc vi mô vào giá đỡ.
- Vặn hai vít phía trước cho động cơ bước, sử dụng M3x35 để gắn giá đỡ. Các lỗ thực sự là các khe để điều chỉnh điểm dừng cuối. Tôi có kết quả tốt khi giá đỡ bằng phẳng với bộ phận chứa động cơ.
- Kết nối dây với MCU của bạn.
- Cố định bộ giảm chấn vào cổng kết nối, sử dụng các lỗ và vít mà bạn đã sử dụng cho cầu nối cáp của mình. Giá đỡ được thiết kế cho các vít tiêu chuẩn.
Giấy phép

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!