EG's Servo Probe - Đầu dò Servo DIY Đơn giản và Chính xác

EG's Servo Probe là một thiết kế đầu dò DIY đơn giản, dễ in, không cần hỗ trợ. Sử dụng công tắc hành trình quang và servo micro, nó cung cấp cơ chế dựa vào trọng lực để tự động cân bàn chính xác. Hướng dẫn bao gồm vật liệu, in ấn, lắp ráp, đấu dây và cấu hình Marlin chi tiết. Đạt độ chính xác cao với các bước khắc phục sự cố cho Z binding.







Mô tả
EG's Servo Probe
Đây là một thiết kế nguyên bản với các mục tiêu sau:
- Các bộ phận đơn giản, dễ in, không cần hỗ trợ hoặc xử lý sau in.
- Các bộ phận không in được dễ dàng mua và giá rẻ.
- Cơ chế dựa vào trọng lực, không có lò xo, nam châm, v.v.
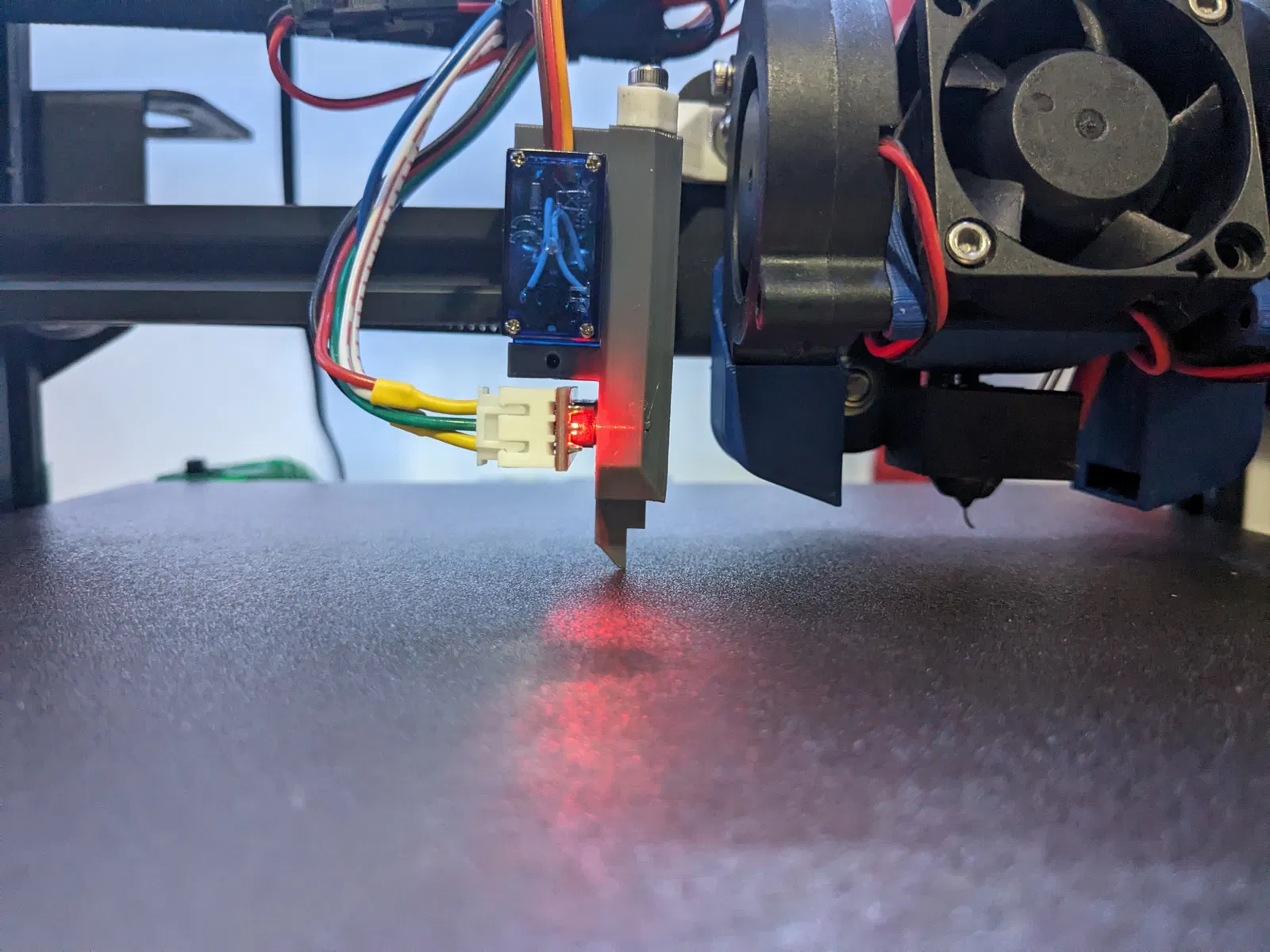
- Đầu dò có thể được gắn sao cho nó cách mặt bàn vài milimét ngay cả khi Z = 0.
- Ngay cả với điều trên, điểm kích hoạt của đầu dò vẫn cách vòi phun nhiều milimét.
Vật liệu
- 1 công tắc hành trình quang/công tắc. Tôi đã dùng loại này (8,99 đô la cho 6 chiếc).
- 1 servo micro. Tôi đã dùng loại này (9,99 đô la cho 6 chiếc).
- 2 vít m3 dài 8mm (để gắn công tắc hành trình vào thân).
- 2 vít m3 dài 10mm (để gắn thân vào đế đỡ).
In
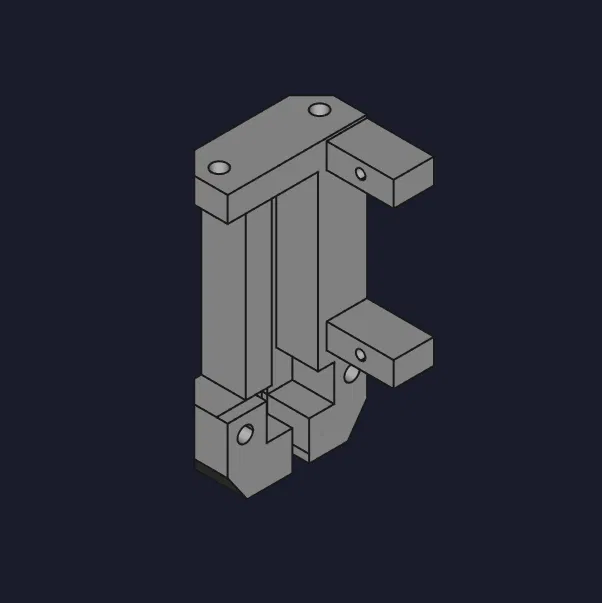
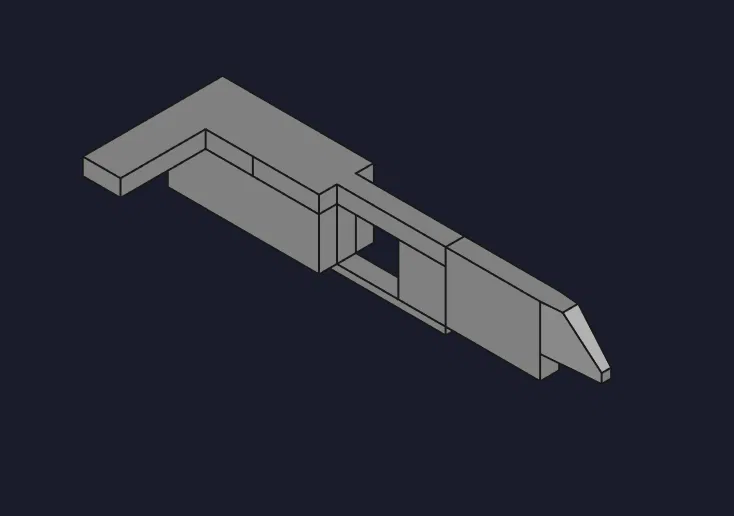
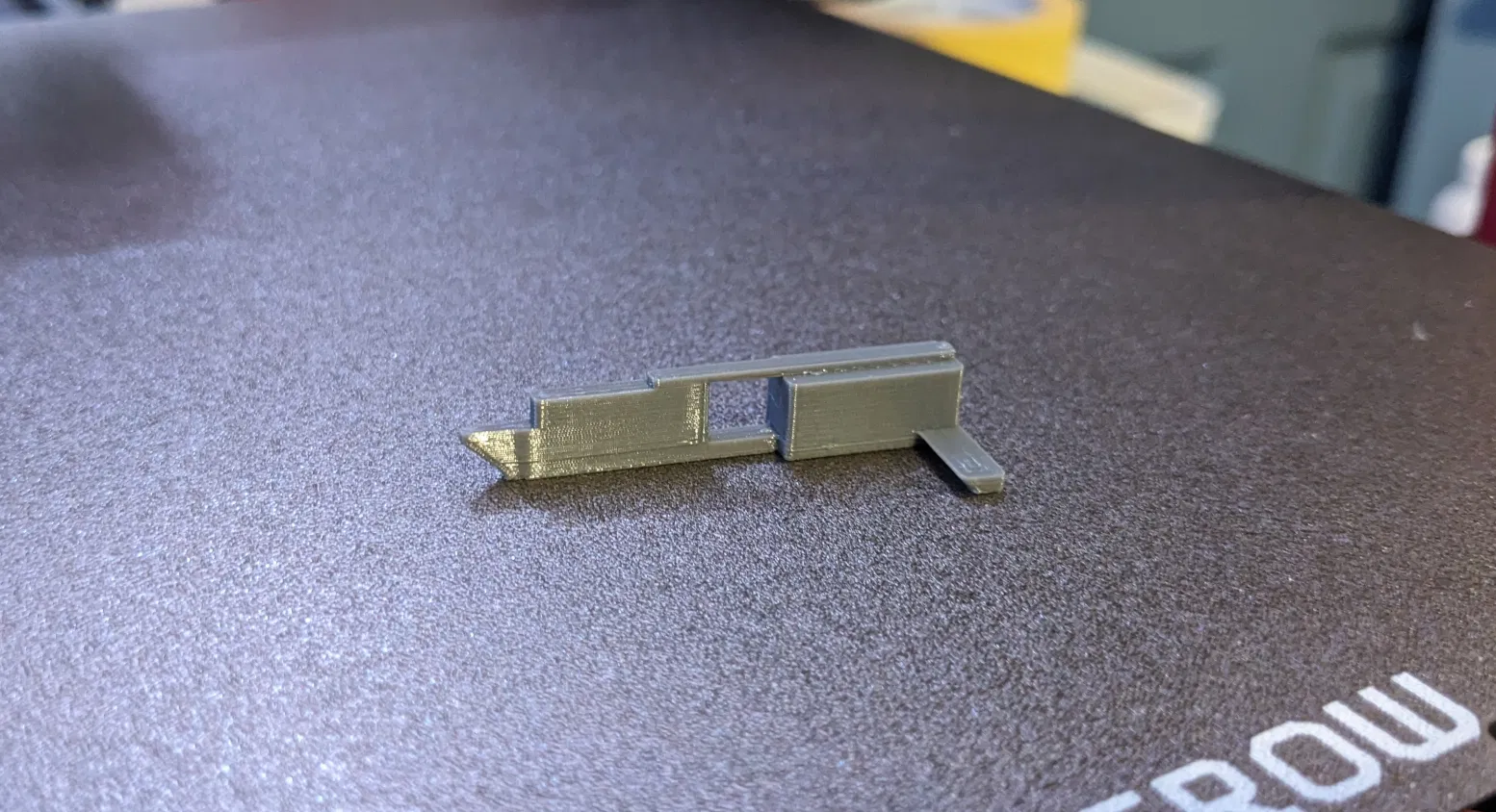
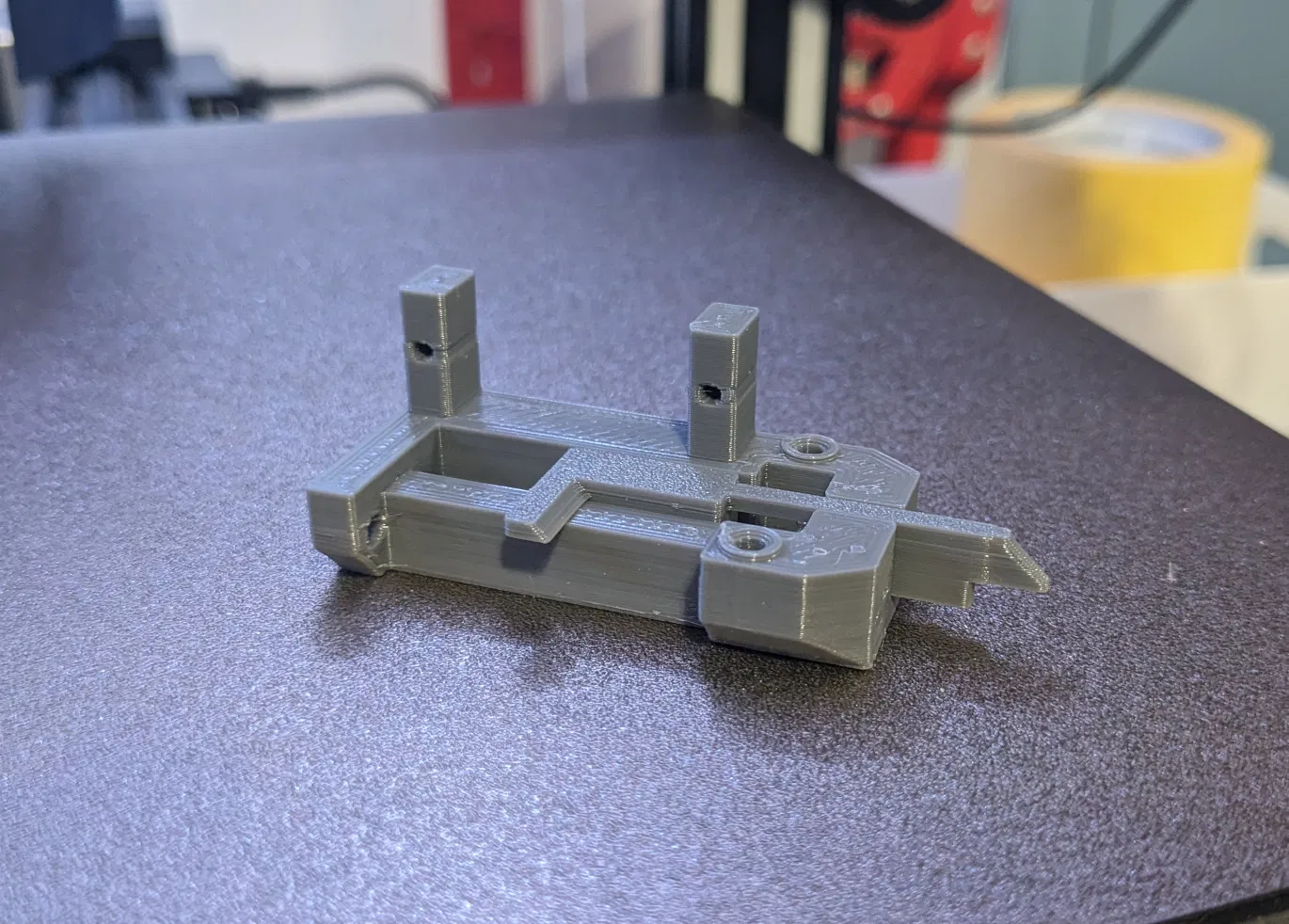
In từng bộ phận ở mặt phẳng như hình. Ở hướng đúng, không cần hỗ trợ.


- Mô hình được thiết kế cho độ cao lớp 0.2mm. Bạn có thể in với độ cao lớp nhỏ hơn nếu muốn, nhưng độ cao lớp lớn hơn có thể sẽ không in đúng.
- Chu vi và độ đặc ruột không quá quan trọng vì đây là các mô hình nhỏ và hầu hết các chỗ sẽ có độ đặc ruột 100%. Tuy nhiên, hãy xem kết quả lát cắt của bạn và xác minh.
- Bạn nên in các bộ phận này bằng sợi nhựa chịu nhiệt cao nhất mà bạn thường xuyên sử dụng. Mặc dù đầu dò vẫn cách mặt bàn vài milimét, nhưng nó vẫn ở gần đó trong quá trình in lớp đầu tiên dài. PLA sẽ ổn nếu bạn chỉ in PLA, nhưng nếu bạn cũng in PETG, thì bạn nên sử dụng PETG cho ít nhất thân đầu dò.
- Cờ phải có màu tối và đặc. Nếu bạn không có sợi nhựa màu tối và đặc, bạn có thể dùng bút dạ vĩnh cửu để ‘vẽ’ cờ nếu cần.
Lắp ráp
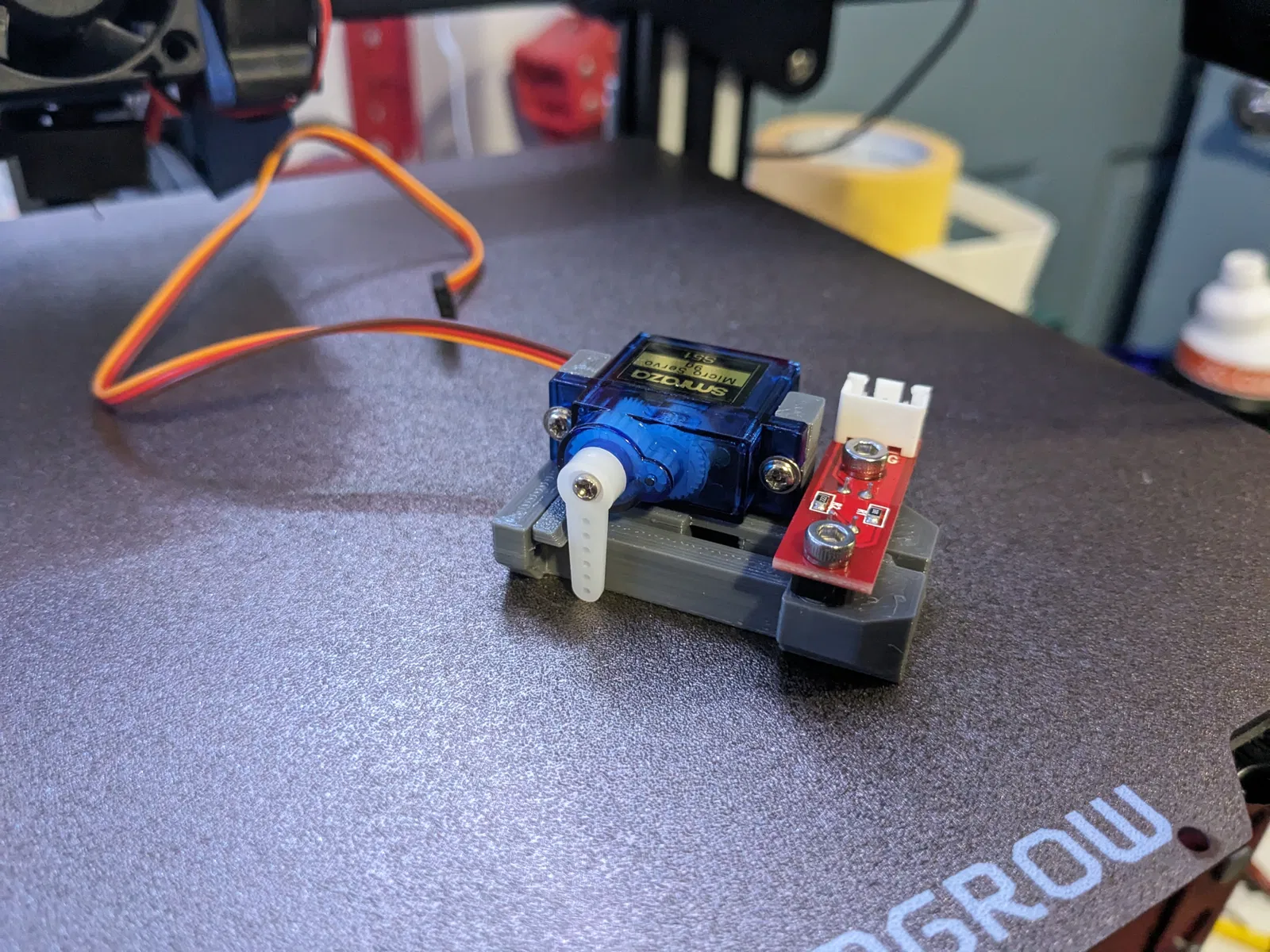
Cờ khớp với thân như hình. Nó nên di chuyển tự do.

Gắn công tắc hành trình bằng 2 vít m3. Vít nên được siết chặt cho đến khi công tắc hành trình không di chuyển nữa. Xác minh rằng cờ vẫn di chuyển tự do.

Gắn servo bằng vít m2 đi kèm. Tại thời điểm này, bạn có thể chưa biết hướng đúng của tay đòn, vì vậy hãy cứ để nó ra ngoài. Sau khi bạn thiết lập firmware, bạn có thể di chuyển servo đến vị trí thu hoặc triển khai thích hợp và gắn tay đòn vào lúc đó.

Đế đỡ
Đế đỡ đi kèm sẽ hoạt động cho thiết lập chung trên các máy in kiểu Ender 3 cũ. Bạn có thể sẽ muốn tự thiết kế đế đỡ của riêng mình để phù hợp với đế gắn bộ phận làm nóng/quạt của bạn.
Dây nối
Cách đơn giản nhất để nối dây là sử dụng các đầu nối hiện có trên công tắc hành trình và servo. Điều này sẽ khác nhau tùy thuộc vào bo mạch chủ của máy in, nhưng bạn có thể nối công tắc hành trình vào cổng công tắc Z và servo vào cổng servo/đầu dò thích hợp, hoặc bạn có thể nối cả hai vào một cổng đầu dò chuyên dụng, trong trường hợp đó, công tắc hành trình và servo sẽ dùng chung 5V và mass.
Trong mọi trường hợp, hãy xác minh rằng bạn đang cung cấp 5V cho servo và điện áp phù hợp cho công tắc. Nếu bạn cũng cấp 5V cho công tắc, hãy xác minh rằng chân mà nó được kết nối có khả năng chịu được 5V (nhiều cổng công tắc không làm được!).
Cấu hình Marlin
-
Bật
USE_PROBE_FOR_Z_HOMING. -
Nếu công tắc hành trình được nối với cổng công tắc Z, hãy bật
Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN. -
Đặt
Z_PROBE_SERVO_NRthành giá trị thích hợp. Trong hầu hết các trường hợp, giá trị này sẽ là 0. -
Góc triển khai và thu nên được đặt lần lượt là 180 và 90.
-
Khoảng hở Z phải ít nhất là 7mm.
-
Bật
Z_SERVO_DEACTIVATE_AFTER_STOWvàDEACTIVATE_SERVOS_AFTER_MOVE.define USE_PROBE_FOR_Z_HOMING
define Z_PROBE_SERVO_NR 0
ifdef Z_PROBE_SERVO_NR
define Z_SERVO_ANGLES { 180, 90 } // Góc triển khai và thu servo Z
//#define Z_SERVO_MEASURE_ANGLE 45 // Sử dụng nếu servo phải di chuyển đến vị trí "thoải mái" để đo sau khi triển khai //#define Z_SERVO_INTERMEDIATE_STOW // Thu đầu dò giữa các điểm
define Z_SERVO_DEACTIVATE_AFTER_STOW // Tắt servo khi đầu dò được thu
endif
define Z_CLEARANCE_DEPLOY_PROBE 7 // (mm) Khoảng hở Z để triển khai/thu
define Z_CLEARANCE_BETWEEN_PROBES 7 // (mm) Khoảng hở Z giữa các điểm dò
define Z_CLEARANCE_MULTI_PROBE 7 // (mm) Khoảng hở Z giữa nhiều lần dò
define Z_PROBE_ERROR_TOLERANCE 3 // (mm) Dung sai cho kích hoạt sớm (<= -probe.offset.z + ZPET)
define Z_AFTER_PROBING 7 // (mm) Vị trí Z sau khi dò xong
define DEACTIVATE_SERVOS_AFTER_MOVE
Độ lệch đầu dò
Độ lệch đầu dò của bạn sẽ khác nhau tùy thuộc vào vị trí lắp đặt. Các giá trị sau đây nên là điểm khởi đầu tốt cho đế đỡ đi kèm:
#define NOZZLE_TO_PROBE_OFFSET { -56, -18, -6.0 }Độ chính xác
Tôi thường xuyên thấy độ chính xác lớn hơn 0.01mm từ đầu dò này:
Send: M48 V4
Recv: M48 Z-Probe Repeatability Test
Recv: Positioning the probe...
Recv: Bed X: 115.0000 Y: 112.0000 Z: -0.0005
Recv: 1 of 10: z: 0.001 Mean: 0.000998 Sigma: 0.000000 Min: 0.001 Max: 0.001 Range: 0.000
Recv: 2 of 10: z: -0.001 Mean: 0.000248 Sigma: 0.000750 Min: -0.001 Max: 0.001 Range: 0.002
Recv: 3 of 10: z: -0.001 Mean: -0.000002 Sigma: 0.000707 Min: -0.001 Max: 0.001 Range: 0.002
Recv: 4 of 10: z: -0.001 Mean: -0.000127 Sigma: 0.000650 Min: -0.001 Max: 0.001 Range: 0.002
Recv: 5 of 10: z: -0.001 Mean: -0.000202 Sigma: 0.000600 Min: -0.001 Max: 0.001 Range: 0.002
Recv: 6 of 10: z: -0.002 Mean: -0.000419 Sigma: 0.000731 Min: -0.002 Max: 0.001 Range: 0.003
Recv: 7 of 10: z: -0.002 Mean: -0.000574 Sigma: 0.000776 Min: -0.002 Max: 0.001 Range: 0.003
Recv: 8 of 10: z: -0.002 Mean: -0.000690 Sigma: 0.000788 Min: -0.002 Max: 0.001 Range: 0.003
Recv: 9 of 10: z: -0.002 Mean: -0.000780 Sigma: 0.000786 Min: -0.002 Max: 0.001 Range: 0.003
Recv: 10 of 10: z: -0.002 Mean: -0.000852 Sigma: 0.000776 Min: -0.002 Max: 0.001 Range: 0.003
Recv: Finished!
Recv: Mean: -0.000852 Min: -0.002 Max: 0.001 Range: 0.003
Recv: Standard Deviation: 0.000776
Recv:
Recv: ok P63 B1Nếu bạn đang gặp khó khăn trong việc đạt được điều này, hãy đảm bảo rằng công tắc hành trình được siết chặt đúng cách vào thân và đế đỡ không bị cong vênh khi đầu dò đang được sử dụng. Sau đó, xác minh rằng máy in của bạn không bị kẹt trục Z. Ngay cả khi các bản in của bạn trông ổn, bạn có thể bị mất một hoặc hai bước khi thay đổi chuyển động Z đột ngột và điều này có thể ảnh hưởng đến độ chính xác theo thứ tự độ lớn hoặc hơn.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!