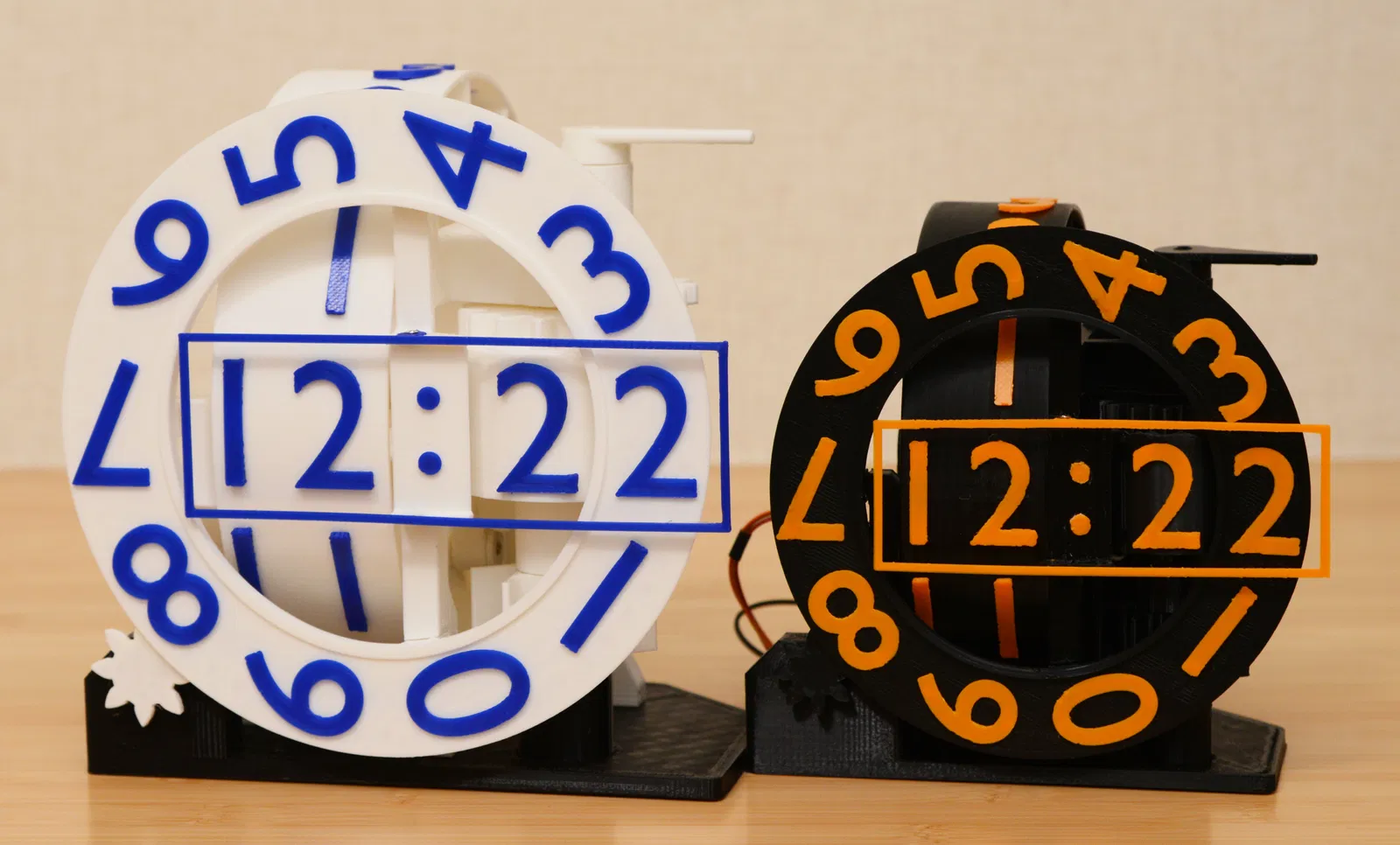
Đồng hồ cơ Numechron trục xoay ba chiều

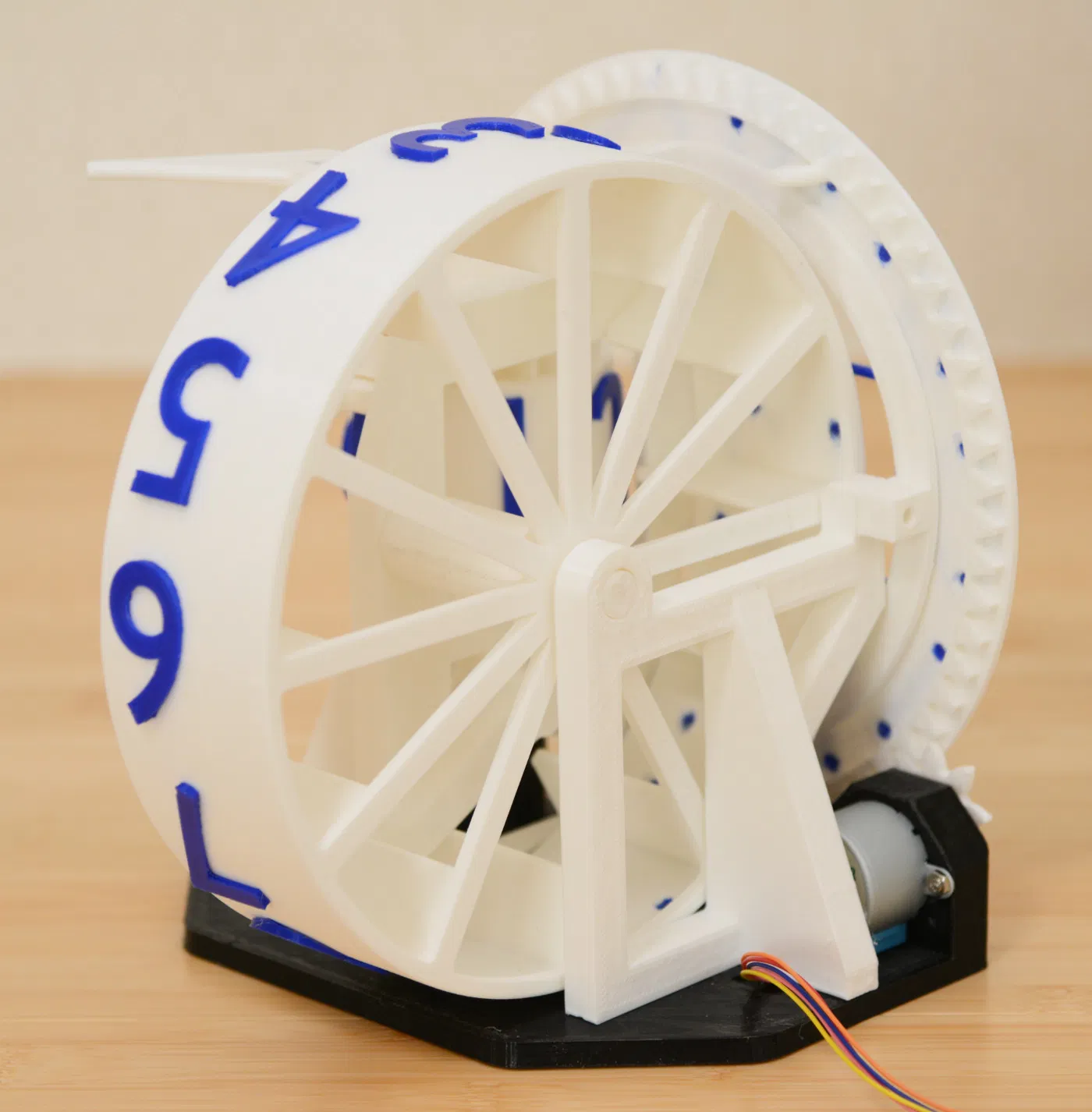
Chiếc đồng hồ kỹ thuật số cơ khí Numechron độc đáo này hiển thị thời gian bằng ba bánh răng số trên các trục X, Y, Z khác nhau. Nó hoạt động bằng một động cơ bước duy nhất, có thể điều chỉnh thời gian thủ công và dễ dàng lắp ráp với các bộ phận in 3D.








Mô tả
Một chiếc đồng hồ kỹ thuật số cơ khí với ba bánh răng số trên ba trục khác nhau (X, Y và Z) so với nhau.
- Nhìn điên rồ nhưng thiết thực
- Được điều khiển bởi một động cơ bước duy nhất
- Tất cả các bộ phận được thiết kế trong phạm vi 180 x 180mm
- Điều chỉnh thời gian dễ dàng bằng thao tác thủ công (vật lý)
- Tầm nhìn rõ nét với các ký tự số lớn
Ngày 6 tháng 11 năm 2023: Tôi nhận thấy mình đã tải lên sai tệp .ino (chương trình) không khớp với ảnh mạch. Tôi đã tải lên phiên bản chính xác.
Video
Cách làm
Các bộ phận cần thiết

- Các loại vít tự ren 2mm
- Động cơ bước có hộp số 28BYJ-48 và bảng điều khiển đi kèm
- Bất kỳ vi điều khiển nào (Arduino, ESP32, Raspberry Pi, v.v.)
In



- In tất cả các bộ phận với tư thế được cung cấp.
- Không cần cấu trúc hỗ trợ ngoại trừ "10min-rotor.stl".

- Loại bỏ các mảnh vụn và vết lồi cẩn thận, đặc biệt là xung quanh trục và các bề mặt trượt.
- Sử dụng vật liệu có màu khác cho các chữ số.

- Các bộ phận chữ số khó phân biệt với nhau. Đặc biệt, "6" và "9" dễ nhầm lẫn (nhưng hình dạng không giống hệt nhau). Độ cong của mặt sau các chữ số khác nhau đối với giờ, hàng đơn vị và hàng chục của phút.
Gắn các chữ số vào rôto

Bạn có thể gắn các chữ số vào rôto bằng keo (ví dụ: keo siêu dính) hoặc hàn nhựa.
- Tôi khuyên dùng phương pháp hàn vì nó dễ dàng, nhanh chóng và đẹp mắt. Sử dụng mỏ hàn kiểm soát nhiệt độ để đặt ở nhiệt độ thấp (250 độ C) để tránh khói vật liệu.
- Các lỗ trên rôto được bố trí cho từng chữ số. Vui lòng xác nhận xem vị trí có đúng hay không trước khi cố định các chữ số.
Lắp ráp bộ khung bên phải

- Gắn "int-gear.stl" và "hour-driver.stl" vào lỗ của "frame-right.stl".
- Gắn hai bộ điều chỉnh vào khung.
- Gắn "1min-rotor.stl" vào khung bằng "1min-holder-1.stl" và "1min-holder-2.stl".
- Vui lòng đảm bảo tất cả các bộ phận quay trơn tru.
Lắp ráp hàng chục của phút

- Lắp ráp "10min-driver.stl" và "10min-rotor.stl". Hướng của các bộ phận được quy định bởi hình dạng hình thang của các khớp nối giữa các bộ phận.
- Căn chỉnh hai điểm đánh dấu trên các bánh răng đối diện nhau.
- Vui lòng đảm bảo rằng bộ điều chỉnh 10 phút được đặt trên bộ điều khiển 10 phút.
Lắp ráp các bộ phận còn lại

- Gắn động cơ bước và "motor-gear.stl".
- Lắp ráp rôto giờ với khung bên trái.
- Gắn các bộ phận còn lại bằng ốc vít.
Mạch điện

- Sử dụng vi điều khiển yêu thích của bạn để điều khiển động cơ bước.
- Chương trình mẫu (numechron.ino) dành cho Arduino. Nếu không, hãy điều khiển động cơ 1536 bước mỗi phút.
- Vỏ cho Arduino nano và bảng điều khiển có thể tìm thấy tại https://www.thingiverse.com/thing:5145523
Nếu động cơ quay theo chiều ngược lại, hãy thay đổi mã nguồn từ
int port[4] = {7, 6, 5, 4};thành
int port[4] = {4, 5, 6, 7};Vận hành (điều chỉnh thời gian)
- Các rôto giờ và 10 phút có thể được xoay bằng tay của bạn. Chỉ xoay theo chiều thuận.
- Chương trình cho Arduino điều khiển động cơ ngay lập tức sau khi reset. Do đó, bạn có thể tiến 1 phút bằng nút reset.
- Căn chỉnh rôto 1 phút cũng có thể thực hiện được bằng nút reset. Nhấn nút reset khi chữ số đến đúng vị trí.
Phiên bản thu nhỏ 80%

- In tất cả các bộ phận ở tỷ lệ 80%.
- Sử dụng các mô hình đã sửa đổi (tải xuống từ Instructables) cho "frame-base.stl" và “motor-gear.stl” vì động cơ bước không bị thu nhỏ. Các mô hình này cũng nên được thu nhỏ tỷ lệ 80% khi in.
- Nếu "1min-holder-1.stl" quá mỏng, hãy sử dụng "1min-holder-1-thicker.stl" thay thế.
Lưu ý: Vì số lượng tệp tùy chọn tăng lên, có thể gây nhầm lẫn khi thêm chúng ở đây. Vì vậy, vui lòng tải xuống các tệp tùy chọn từ bước 8 và 9 tại Instructables.
Tinh chỉnh tốc độ đồng hồ

- Đo sai số của đồng hồ của bạn. Căn chỉnh đồng hồ của bạn đúng cách và đợi 24 giờ, sau đó đo sai số của đồng hồ của bạn theo giây.
- Nhập giá trị sai số (tính bằng giây) cho giá trị có tên COMPENSATION_SECONDS ở dòng số 1 trong mã nguồn. Nếu đồng hồ của bạn chạy nhanh (quá nhanh), hãy nhập giá trị dương và ngược lại.
- Biên dịch và nạp chương trình của bạn vào vi điều khiển của bạn.
Lịch sử cập nhật
- Ngày 4 tháng 11 năm 2023: "motor-gear.stl" được sửa đổi để thêm một vòng đệm 1mm, cho trường hợp lắp lỏng vào trục động cơ
- Ngày 18 tháng 11 năm 2023: Mã được cải thiện để nhập trực tiếp giá trị bù tốc độ đồng hồ theo giây.
- Ngày 18 tháng 11 năm 2023: Các tệp tùy chọn đã bị xóa để tránh nhầm lẫn. Vui lòng tải chúng từ Instructables.
Thể loại: Gadgets
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình



















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!