Khớp Nối Cánh Tay Omnibot 5402

Khớp nối thay thế cho mẫu robot Omnibot 5402 của Tomy đời những năm 1980. Dùng để sửa chữa cánh tay trên bị gãy. Hướng dẫn lắp đặt chi tiết, có gợi ý cài đặt in 3D.














Mô tả
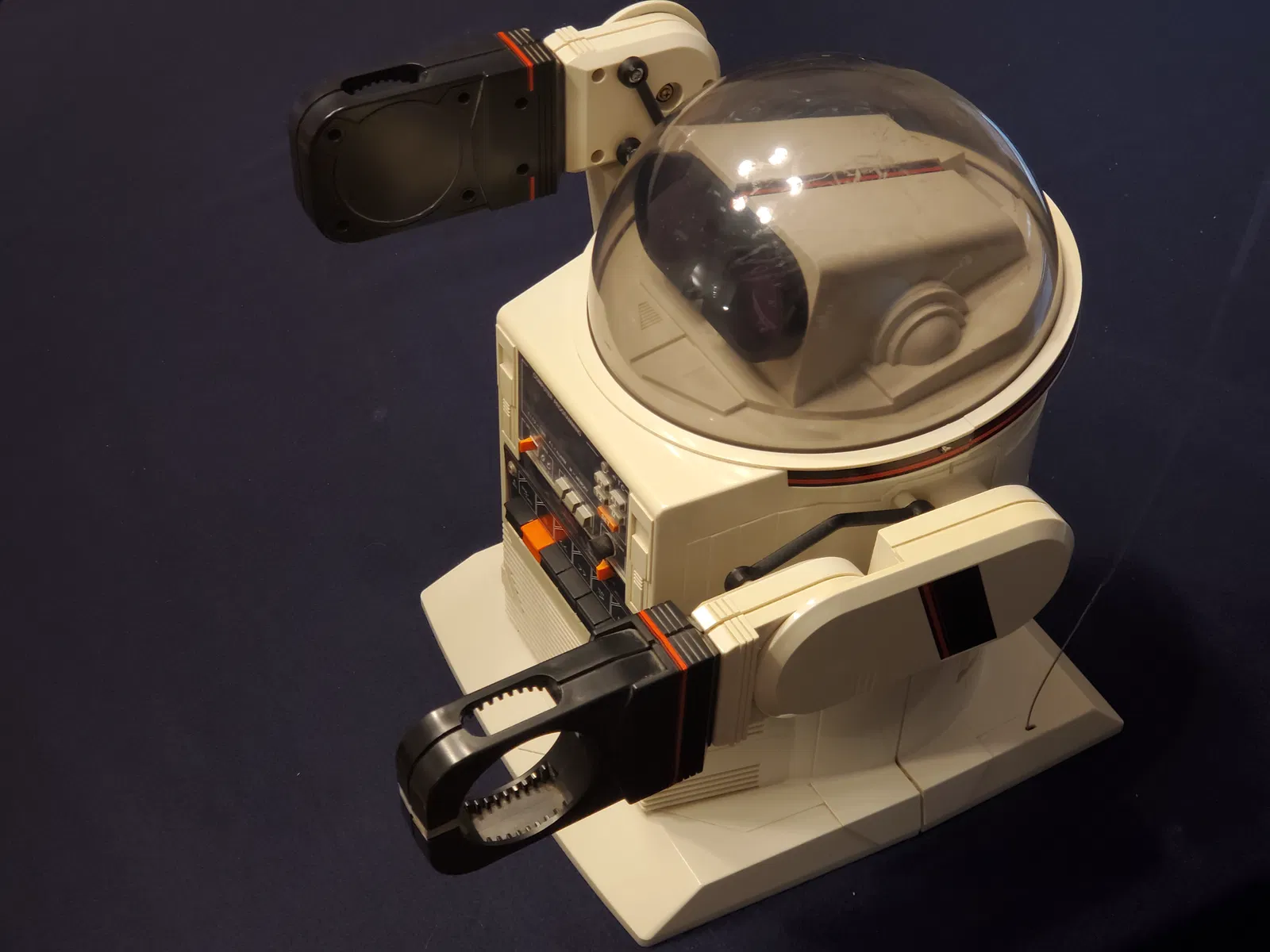
Con trai tui với tui đang sửa lại con Omnibot hồi xưa tui được tặng Noel hồi đầu những năm 1980 nè. Gãy hết hai cái khớp nối ở cánh tay trên rồi, mà năm nay mới sắm được cái máy in 3D, nên tụi tui làm cái này trước nè.
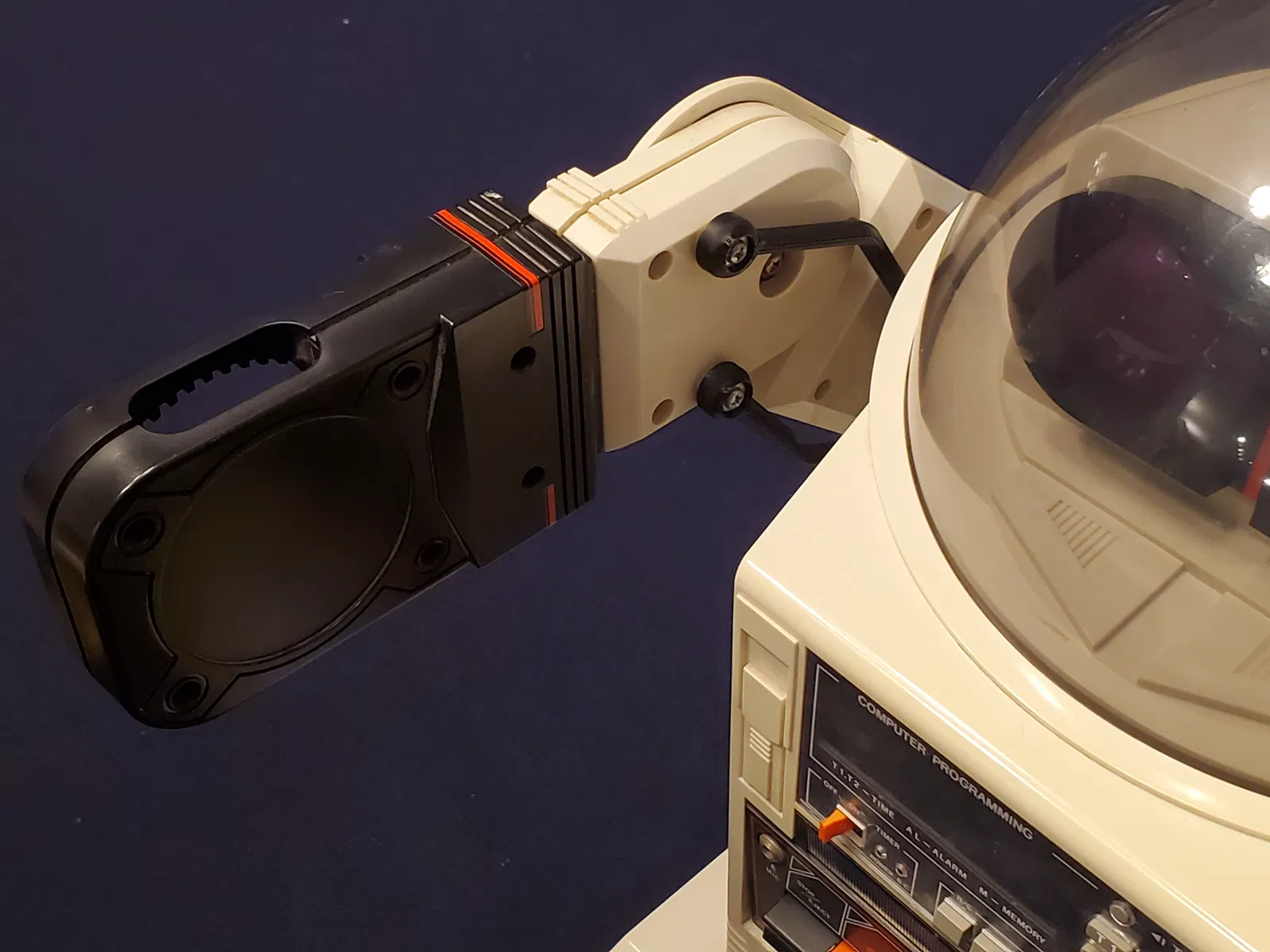
Mỗi cánh tay có hai khớp nối. Khớp nối phía dưới có khoét một cái rãnh để cánh tay co lại hết cỡ mà không bị cạ vô khớp nối phía trên. Nhớ để ý kỹ nha, lắp sai chiều là không được đâu, vì hai bên lỗ gắn nó bự nhỏ khác nhau đó. Bên nào bo tròn hơn thì quay vô trong người, bên nào phẳng hơn thì quay ra ngoài. Nếu có nhiều người thích, tui có thể làm thêm mấy cái chi tiết nhỏ (greebles) giống mẫu zin nữa đó.
Tui in bằng PETG, cái này nó dẻo hơn PLA, bẻ nó cũng khó gãy hơn.
Cài đặt gợi ý:
- Wall Loops: 6
- Supports: Enabled
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!