Giá đỡ bàn RPLidar A2 cho TurtleBot2

Bộ giá đỡ này giúp gắn RPLidar A2 lên bàn tiêu chuẩn của TurtleBot2 một cách chắc chắn. Thiết kế giải quyết vấn đề về lỗ không khớp và đảm bảo cảm biến được căn chỉnh chính xác. Bao gồm các mẹo in, phần cứng cần thiết và hướng dẫn lắp ráp chi tiết.



Mô tả
Chào bạn!
Tôi hiện đang học Kỹ thuật Phần mềm Robot tại trường Universidad Rey Juan Carlos ở Madrid, Tây Ban Nha. Trong quá trình học, chúng tôi đang sử dụng TurtleBot2 làm nền tảng để học ROS 2.
Ban đầu, TurtleBot2 được trang bị RPLidar A2, nhưng trong giai đoạn đầu phát triển của nền tảng, cảm biến được gắn bằng dây velcro. Tuy nhiên, giờ thì không còn như vậy nữa!
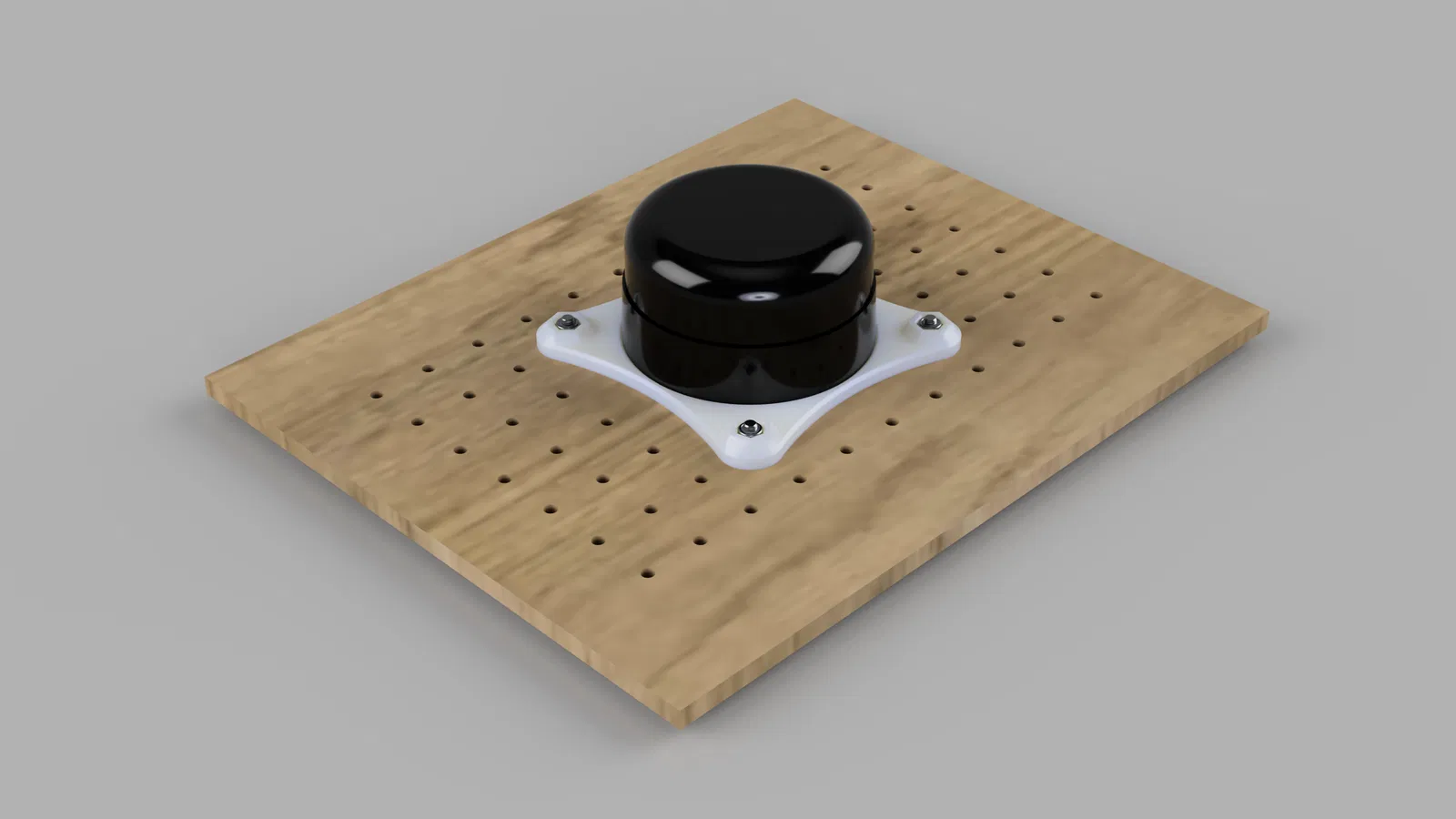
Tôi đã chủ động thiết kế một bộ giá đỡ vì các lỗ trên mặt bàn của TurtleBot2 không khớp với các lỗ trên cảm biến. Giờ đây, với bộ giá đỡ mới này, cảm biến được cố định chắc chắn tại chỗ, đảm bảo căn chỉnh chính xác!
Mẹo in:
- Vì tôi không tìm thấy thông tin về nhiệt độ mà cảm biến đạt được trên bề mặt tiếp xúc với giá đỡ, tôi luôn dùng ABS/ASA làm nguyên tắc chung để in các bộ phận sẽ tiếp xúc trực tiếp với linh kiện điện tử. Vật liệu này chịu được nhiệt độ cao dễ dàng, nên thà cẩn thận còn hơn!
- Giá đỡ có đủ diện tích tiếp xúc với bàn in để tránh dùng brims hoặc rafts, và nên được in ở hướng ban đầu, vì các lỗ chìm sẽ tự hỗ trợ. Chỉ cần sử dụng cài đặt thông thường cho vật liệu in bạn đã chọn.
- Tôi cũng đã thêm ba lớp tường (walls) để cải thiện độ bền của bộ phận tại nơi ốc vít sẽ tạo áp lực.
Phần cứng bổ sung cần thiết
- Ốc M3 x 8mm đầu chìm (DIN7991) (4 cái) LƯU Ý: Theo datasheet RPLidar A2 (Trang 17) thì ốc chỉ nên dài tối đa 4mm để tránh làm hỏng cảm biến. Vì giá đỡ cũng dày 4mm, chiều dài TỐI ĐA 8mm cho các ốc này nên được tuân thủ!
- Ốc M4 x 16mm (DIN912) (4 cái)
- Vòng đệm M4 (DIN125 | DIN9021) (4 cái)
- Đai ốc tự khóa M4 (DIN985) (4 cái)
Hướng dẫn lắp ráp
- Sử dụng ốc M3 đầu chìm để cố định cảm biến vào giá đỡ. Vặn chặt ốc, nhưng tránh dùng lực quá mạnh để ngăn ngừa hư hỏng cho cảm biến. Ốc nên nằm phẳng với bề mặt của bộ phận. Đừng lo nếu nó không hoàn toàn phẳng, vì mặt này của giá đỡ sẽ tiếp xúc với mặt bàn của TurtleBot.
- Mẹo nhỏ: Giá đỡ có một vết lõm nhỏ hình dáng của cảm biến để giúp căn chỉnh tâm giữa giá đỡ và cảm biến.
- Sử dụng ốc M4 cùng với đai ốc M4 và vòng đệm để gắn giá đỡ vào mặt bàn. Bạn có thể sử dụng bất kỳ lỗ nào tùy thích, nhưng để có vị trí tối ưu, hãy làm theo cấu hình hiển thị trong ảnh (1 cột lỗ trống ở mỗi bên và 3 hàng lỗ trống ở các cạnh còn lại). Điều này sẽ đảm bảo cảm biến nằm ngay giữa hệ thống! Đai ốc nên vừa khít vào vị trí chỉ bằng lực ấn tay; tuy nhiên, có hai tình huống có thể xảy ra:
- Đai ốc không vừa: Trong trường hợp này, hãy thử dùng ốc để kéo đai ốc vào lỗ cho đến hết. Sau đó, vặn ốc ra và tiến hành lắp giá đỡ vào mặt bàn. Nếu nó quá chặt, việc dùng nhiệt từ máy sấy tóc cũng có thể hữu ích, hoặc có thể gõ nhẹ bằng búa.
- Đai ốc bị lỏng trong lỗ: Đừng lo, các thành lỗ xung quanh đai ốc sẽ cung cấp đủ lực cản để giữ lực xoay của ốc. Chỉ cần dùng ngón tay giữ đai ốc để cố định nó cho đến khi bạn vặn ốc gần hết. Không cần dùng cờ lê!
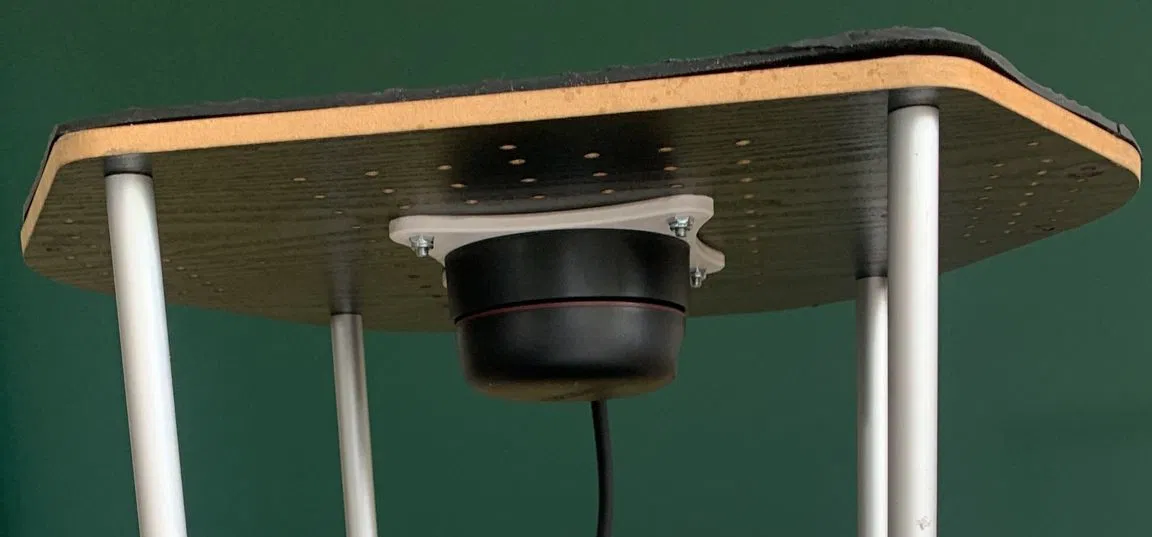
- Tùy chọn: Bạn có thể sử dụng các lỗ trống còn lại trên mặt bàn để luồn cáp một cách an toàn đến bộ điều khiển bằng dây rút (zip ties).
- Tận hưởng cảm biến của bạn được cố định chắc chắn!
Hãy ghé xem GitHub của tôi! Cảm ơn!
Cập nhật mô hình (30/11/2023) (V1.0.1)
Hai tính năng chính đã được sửa đổi cho phiên bản mới:
- Tham chiếu cho các lỗ không được đặt đúng cách, dẫn đến việc ốc đầu phẳng không nằm phẳng với bề mặt của giá đỡ. Bây giờ, các lỗ được định cỡ theo tiêu chuẩn DIN, làm cho phần côn cho ốc lớn hơn.
- Phần lõm cho đai ốc M4 có thể không đủ lớn, làm cho chúng khó thao tác. Bây giờ các thành lỗ sẽ bao phủ toàn bộ chiều cao của đai ốc.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!