Chuyển đổi TVBS Nano Drak VTOL
Khám phá bản chuyển đổi TVBS Nano Drak VTOL, một nền tảng bay hiệu quả hơn với 2 động cơ. Bài viết cung cấp thông tin chi tiết về các bản cập nhật, hướng dẫn lắp ráp, các bộ phận cần thiết và mẹo khắc phục sự cố, cùng các liên kết hữu ích đến video và tài liệu Ardupilot. Tham gia cộng đồng Facebook để trao đổi kinh nghiệm.




Mô tả
Giờ có một nhóm Facebook để bàn luận về việc lắp ráp, những thành công và cả những trục trặc nữa. Nhớ tham gia nhóm tại https://www.facebook.com/groups/vtolhangout
Cập nhật ngày 6 tháng 8 năm 2022:
- Đã cập nhật file param với bản tune mới nhất của tôi. Lưu ý bạn cần kiểm tra xem máy bay đã cân bằng ở chế độ quad chưa bằng cách kết nối với mission planner và kiểm tra. Điều chỉnh AHRS_TRIM_Z để máy bay cân bằng hoàn hảo.
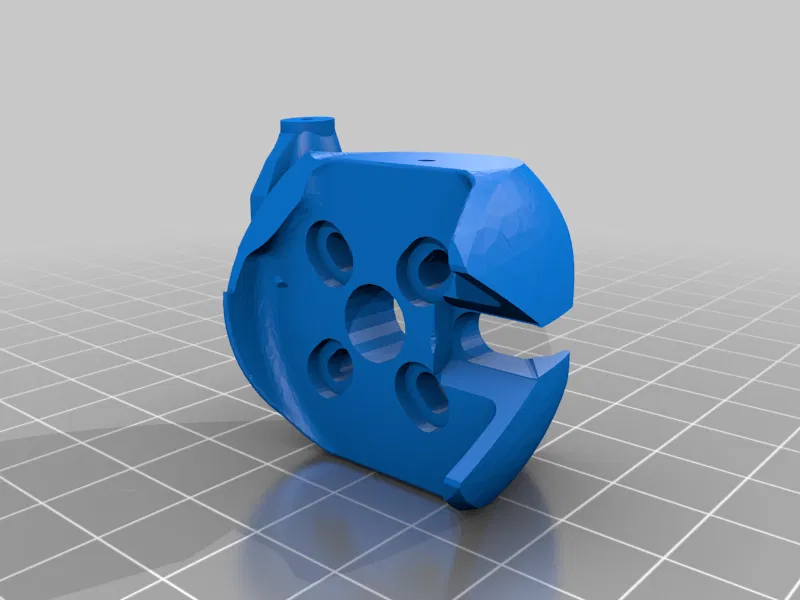
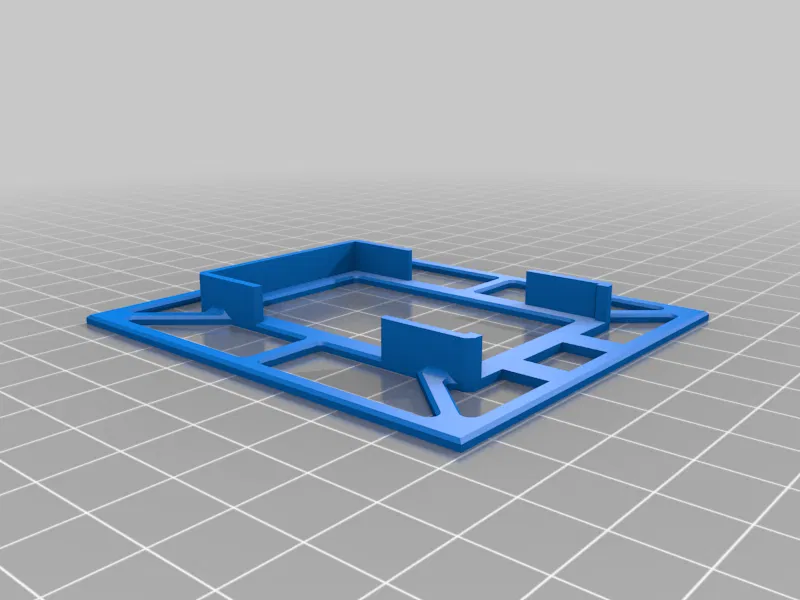
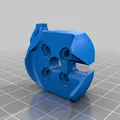
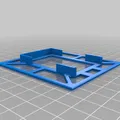
- Đã thêm giá đỡ FC h743 (remix từ đây: https://www.thingiverse.com/thing:5022908) để giữ FC cố định hoàn hảo theo mọi trục.
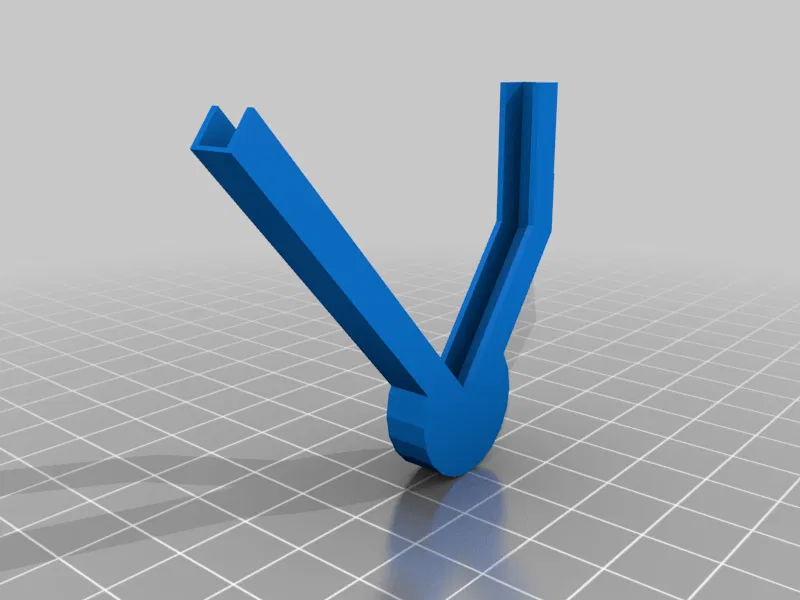
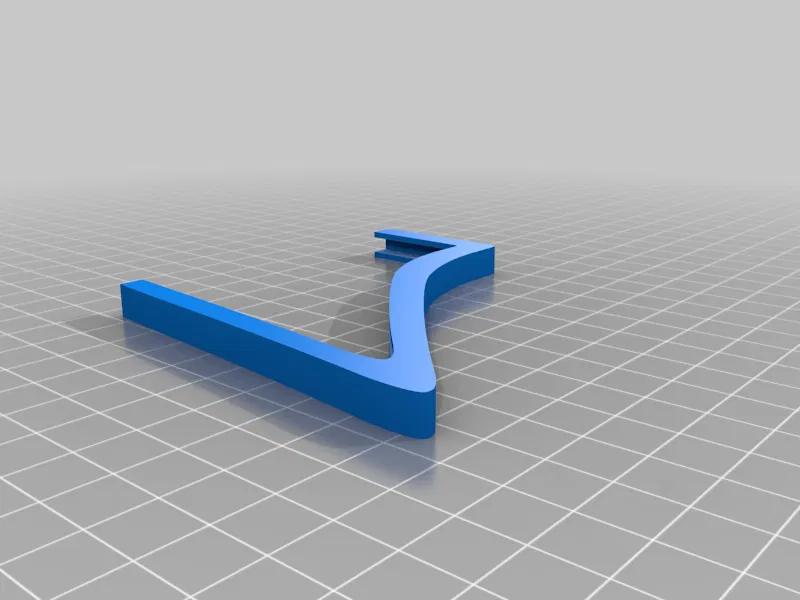
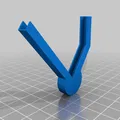
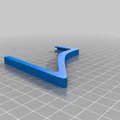
- Đã thêm một bộ phận bảo vệ cánh đuôi để đặt phía sau cánh đuôi tiêu chuẩn (loại không phải boomer) để bảo vệ chúng trong các lần hạ cánh bằng đuôi.
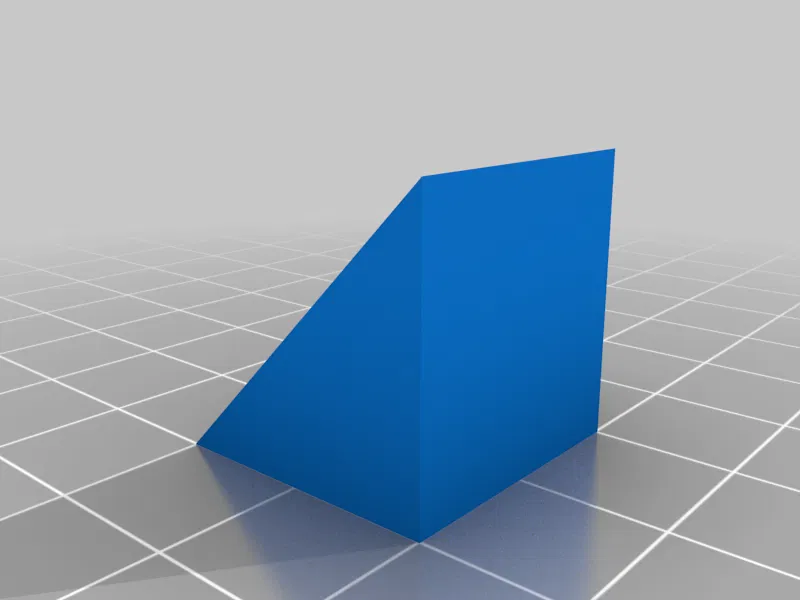
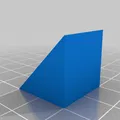
- Đã thêm một miếng đế GPS góc 45 độ để gắn GPS ở góc 45 độ, giúp thu tín hiệu vệ tinh ở cả chế độ ngang và dọc. Hoạt động tốt với các tấm che cửa bên tôi đã sử dụng, tìm thấy ở đây: https://www.thingiverse.com/thing:3929719
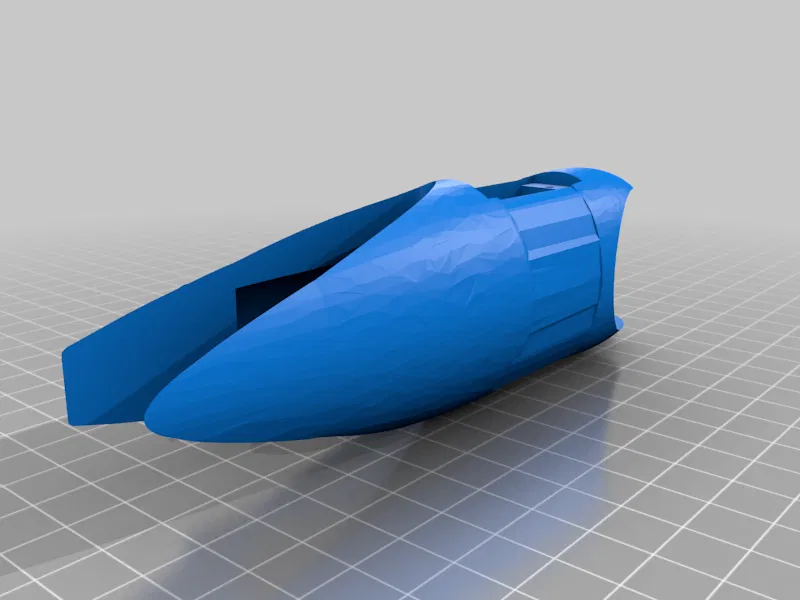
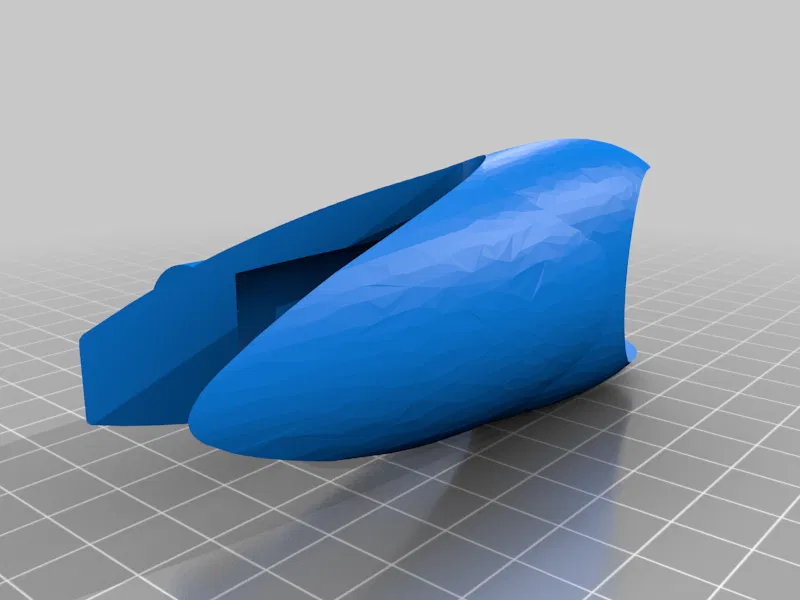
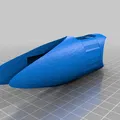
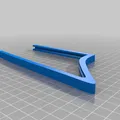
Với tinh thần tiếp tục thử nghiệm những điều mới, tôi đã sửa đổi các bộ phận nâng động cơ (nacelles) của Nano Drak VTOL nguyên bản để hoạt động như một TVBS, Thrust-Vectored Belly Sitter. Thiết kế này đã được chứng minh là hoạt động được và chỉ cần tinh chỉnh thêm để hoàn thiện quá trình chuyển đổi. Đây là một nền tảng VTOL hiệu quả hơn vì nó chỉ sử dụng 2 động cơ. Máy bay nhẹ hơn nhưng trọng tâm (CG) hơi khó điều chỉnh hơn vì không có động cơ ở phía sau để bù trọng lượng của hai động cơ phía trước. Pin có lẽ cần đặt ở phía sau khoang chứa pin.
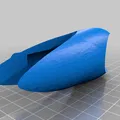
Có 2 phiên bản nacelles. Một phiên bản có khe cắm servo trong nacelle. Điều này giúp việc lắp ráp dễ dàng hơn nhiều vì bạn không cần phải cắt lỗ trên cánh để lắp servo. Nhưng nó cũng làm tăng thêm trọng lượng về phía trước trọng tâm. Tùy thuộc vào trọng lượng ở mũi nano drak của bạn, bạn có thể sử dụng loại nacelles này. Hoặc, bạn có thể sử dụng thiết kế nacelle nhỏ gọn hơn và đặt servo trong cánh. Tôi đã lắp servo của mình trong cánh càng xa về phía sau càng tốt vì tôi có một giá đỡ in 3D nặng với DJI ở mũi nano drak của mình.
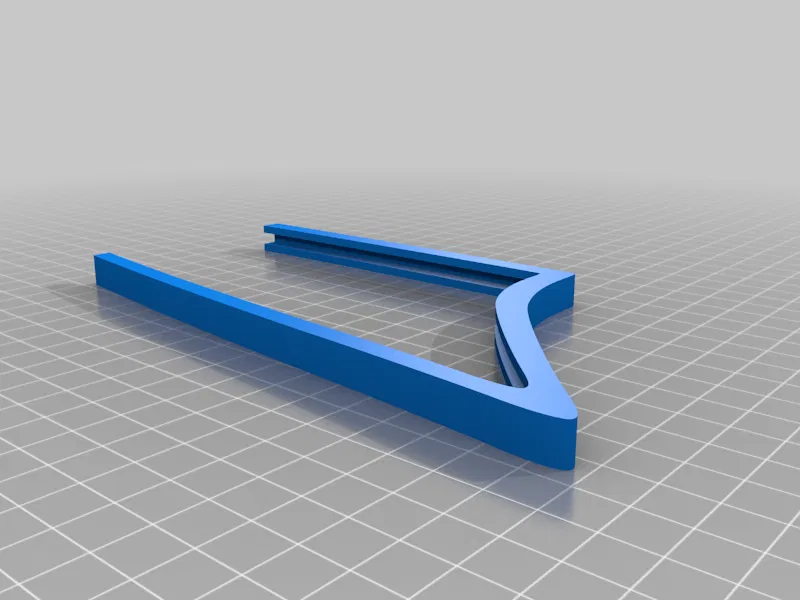
Tôi cũng đã thêm một bộ phận chống va đập cho đuôi dạng thanh (boom tail) nếu bạn chọn sử dụng loại boomer, điều này sẽ giúp ích một chút cho trọng tâm. Việc bảo vệ cánh lái độ cao (elevator) trong cấu hình máy bay đuôi đứng là rất quan trọng. Đây chỉ là một thiết kế nhanh chóng mà tôi đã thực hiện và chưa thực sự thử nghiệm. In theo chiều dọc với bộ phận hỗ trợ có lẽ là tốt nhất (như cách nó được bố trí) để tránh việc phải gỡ bỏ bộ phận hỗ trợ bên trong. Bạn có thể phải cắt tỉa nhẹ cánh lái độ cao ở hai bên để nó không cạ vào bộ phận chống va đập.
Bao gồm file Ardupilot param tôi đã sử dụng trong lần bay thử chuyển đổi đầu tiên.
Đây là video bay thử chế độ bay lơ lửng: https://www.youtube.com/watch?v=d1PKQAvDJWE
Đây là bài kiểm tra chuyển đổi đầu tiên: https://www.youtube.com/watch?v=BL99-sontV4
(vẫn còn một số vấn đề với tune.. chuyển đổi từ bay tới sang bay lơ lửng cần thêm công việc). Thực tế đây có lẽ là Vortex Ring State, giảm độ cao quá nhanh khi có lực đẩy. Cánh quạt có bước xoắn thấp hơn có thể giúp ích. Tôi sẽ thử cánh quạt 6x4 hai lá thay vì 5x4x3. Tốt nhất cũng nên giảm độ cao bằng q-hover hoặc q_loiter và đặt tốc độ giảm độ cao thấp hơn bằng Q_VELZ_MAX_DN đến tốc độ không gây ra sự cố trong quá trình giảm độ cao (tôi đang thử 100 cm/s nhưng vẫn đang tìm cài đặt tốt nhất). Quá nhanh và dường như tất cả các máy bay đuôi đứng đều gặp sự cố.
Video hướng dẫn lắp ráp VTOL ban đầu, không bao gồm chuyển đổi sang TVBS: https://youtu.be/8DG942hFIpE
Và video cài đặt Ardupilot cơ bản (không có thông tin TVBS ở đây): https://youtu.be/4e3JP7eEZIU
Vui lòng làm theo tài liệu Ardupilot tại đây để chuyển đổi ban đầu sang TVBS: https://ardupilot.org/plane/docs/guide-tailsitter.html
Ngoài ra còn có hướng dẫn tinh chỉnh cho máy bay đuôi đứng tại đây: https://ardupilot.org/plane/docs/tailsitter-tuning-guide.html?fbclid=IwAR1naw-sI2J3Xbo57-BIJy65Tul89Atc-INZ8SSWEIZe_M5N2aE-9-wmfeI
Công lao cho thiết kế tilt-rotor ban đầu thuộc về Steve Carlson, người đã thiết kế một chiếc máy bay in 3D hoàn chỉnh tuyệt vời. Xem nó tại đây: https://hackaday.io/project/175286-minihawk-vtol
Tôi đã in bằng Pet-G vì độ bền của nó. Độ điền đầy 20% (50% cho phần đuôi). Các nacelles và giá đỡ động cơ nghiêng được đặt nằm nghiêng. Tôi đã in thành công chúng ở hướng đó với bộ phận hỗ trợ đầy đủ. Sau đó cần dọn dẹp một chút bằng kìm mũi kim nhưng bộ phận hỗ trợ ra khá tốt. Lật ngược cho bên còn lại.
Các bộ phận cần thiết:
Nano Drak.. Ban đầu tôi thử không có bộ boom kit và nó hoạt động, nhưng tôi nghĩ nó hoạt động tốt hơn với bộ boom kit để cân chỉnh trọng tâm. Tôi cũng đã sử dụng cánh dài 40 inch cắt xuống còn 32 inch.
2 động cơ. Tôi đang sử dụng động cơ iflight 2208-1800 https://www.amazon.com/gp/product/B07XYYRWGP/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 với cánh quạt 5x4x3 nhưng cánh quạt apc 6x4 có thể giúp ích cho Vortex Ring State nên tôi sẽ thử nó sớm.
và chạy LIPO 6s 2200
ESC 4 trong 1 hoặc ESC riêng lẻ: https://www.amazon.com/gp/product/B0946J3XZ6/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
Dây motor dài hơn: https://www.amazon.com/dp/B01K4QVW1K?ref=ppx_pop_mob_ap_share
Đầu nối Mr30 cho dây motor: https://www.amazon.com/dp/B07VMK96QH?ref=ppx_pop_mob_ap_share
Bộ điều khiển bay tương thích Ardupilot. Tôi đang sử dụng matek h743 wing v2
GPS kèm la bàn.. tôi đang dùng cái này https://www.amazon.com/gp/product/B092RVFSN4/ref=ppx_yo_dt_b_asin_title_o01_s00?ie=UTF8&psc=1.
Thanh tròn trơn 0.047
Giấy phép

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!