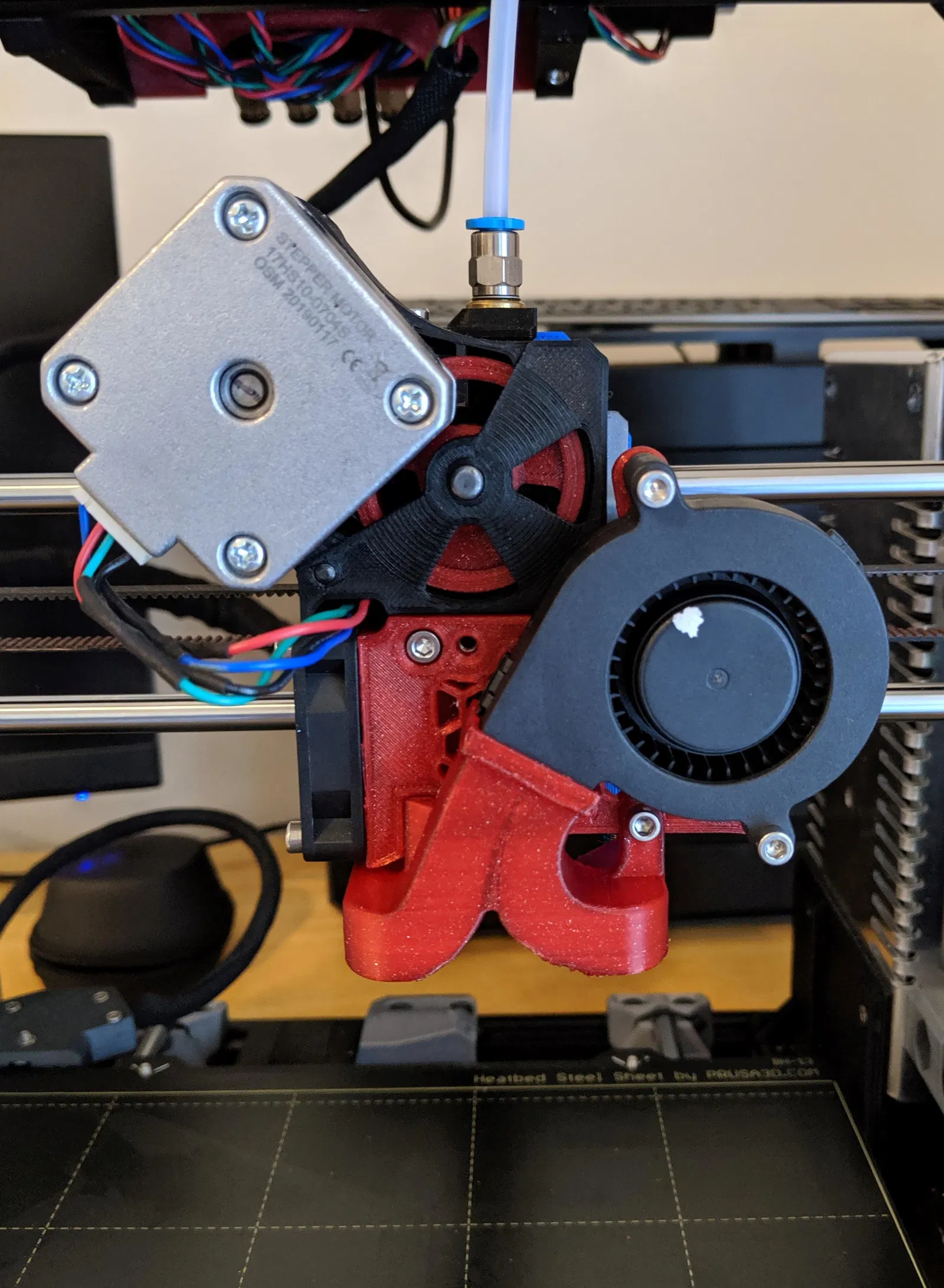
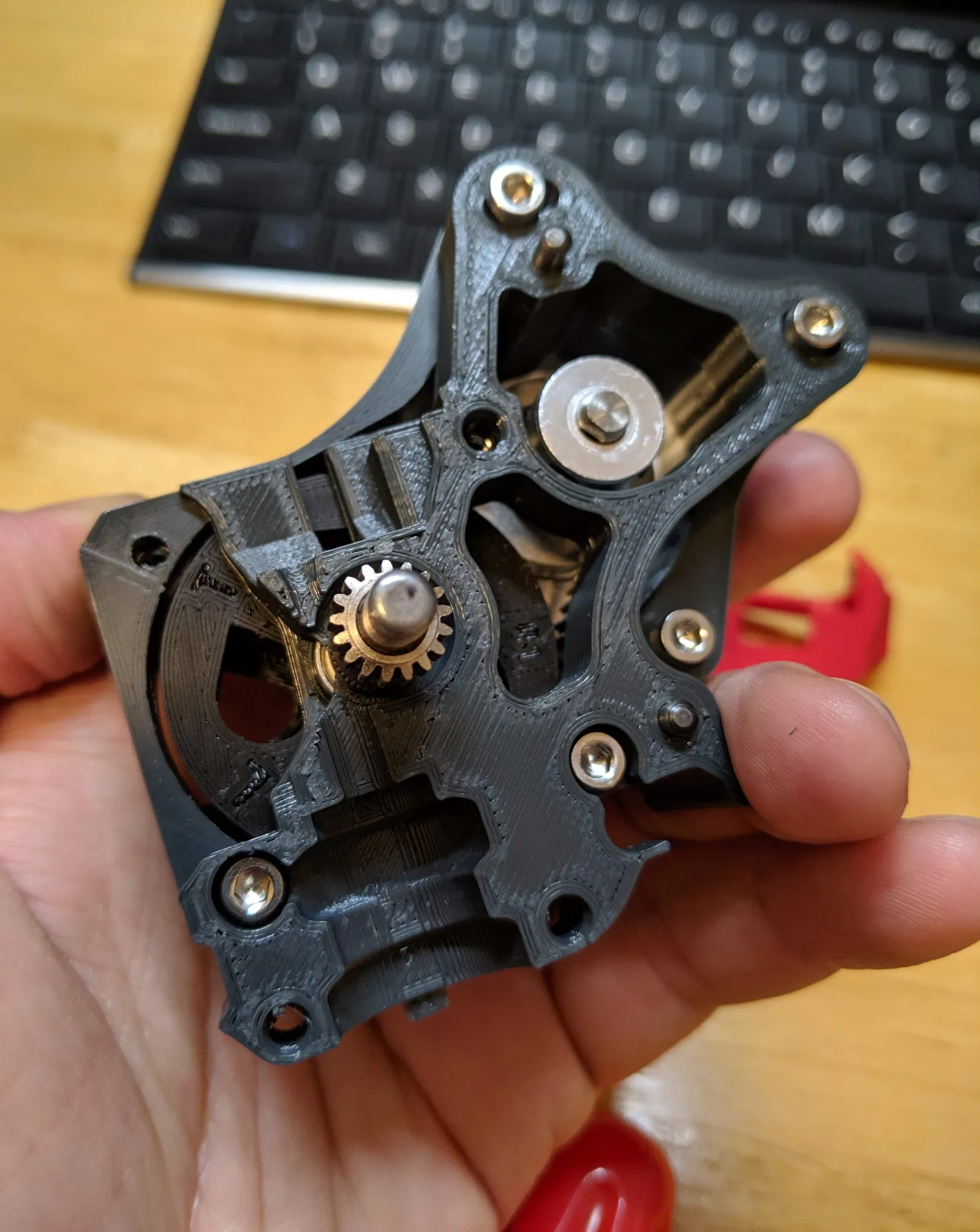
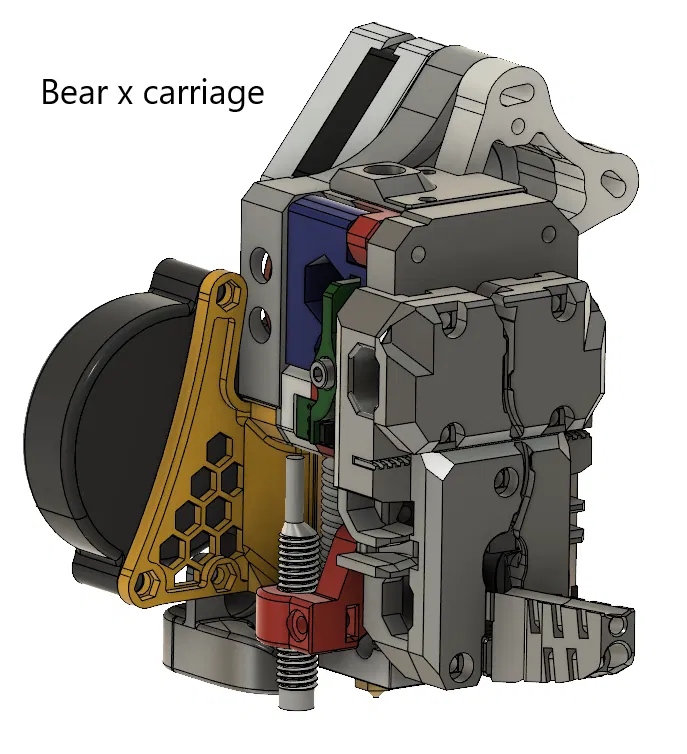
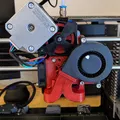
Bộ đùn Delta-P tùy chỉnh cho Prusa MK3S

Khám phá Delta-P, một bộ đùn MK3S tùy chỉnh mang lại nhiều cải tiến như giảm nhiệt độ truyền từ động cơ, độ tuyến tính tốt hơn và tầm nhìn vòi phun rõ ràng hơn. Bao gồm hướng dẫn in chi tiết, tệp STL và STEP, cùng các bản cập nhật quan trọng.
5.6K
Lượt Xem
22
Lượt Thích
297
Lượt Tải
Cập Nhật Dec 18, 2025










Mô tả
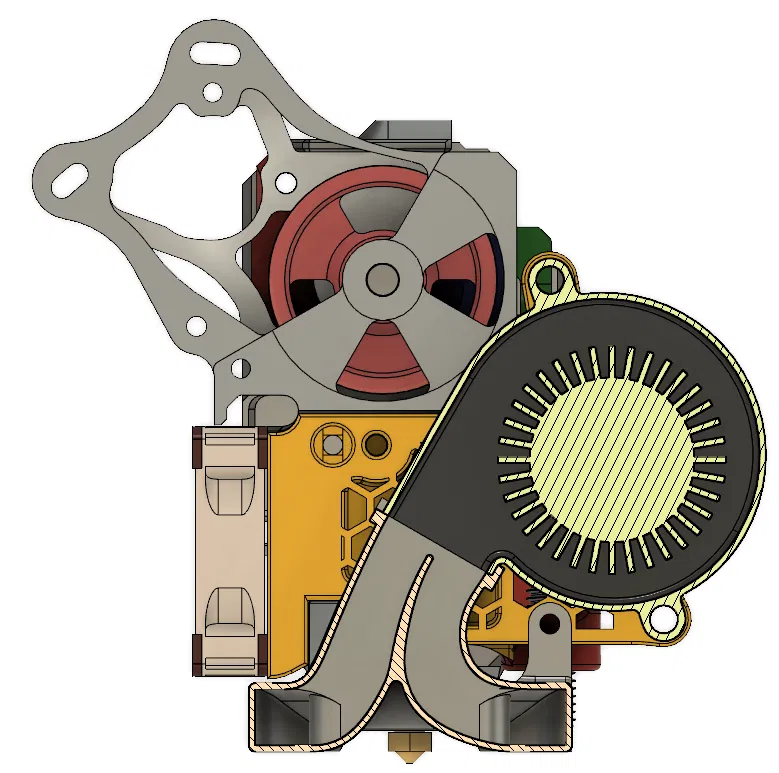
Đây là một bộ đùn MK3S tùy chỉnh có tên là Delta-P. ### Link xem mô hình 3D trực tuyến: https://a360.co/2BwxRKb ### Cập nhật 04/04/2021 Ống dẫn quạt được thiết kế lại hoàn toàn: * Dễ in hơn
- Làm mát tốt hơn
- Luồng khí được tinh chỉnh
- Tối ưu hóa bằng CFD
- Làm mát đều từ trước ra sau và từ trái sang phải
- Tầm nhìn vòi phun được cải thiện Xin cảm ơn rất nhiều máy chủ discord prusa3D vì tất cả phản hồi và đã thực hiện phân tích CFD! Các tệp (stl và stp) cho ống dẫn quạt cập nhật này đã được bao gồm trong thư mục riêng bên dưới. ### Cập nhật 04/12/2020 Cập nhật firmware tùy chỉnh lên phiên bản v3.9.0 ### Cập nhật 2/27/2020 Cập nhật ống dẫn quạt để việc in các cầu nối và phần nhô ra dễ dàng hơn Làm chắc bánh răng 56 răng bằng cách thêm các vòng lặp bên trong ### Cập nhật 12/18/2019 Cập nhật các khe đai trên xe X phiên bản BEAR để dễ dàng lắp đai hơn ### Cập nhật 10/24/2019 Cập nhật hướng dẫn MMU2 Thêm tùy chọn cho bảng mạch cảm biến IR tùy chỉnh để sử dụng trên phiên bản bộ đùn MMU2 ### Cập nhật 10/22/2019 Cải thiện độ khít của bộ phận giữ trục Bontech trong Cửa giữ trục MMU2 để tăng độ tin cậy. ### Cập nhật 15/09/2019: Khắc phục một vài vấn đề trên xe X BEAR ### Cập nhật 09/09/2019: Sắp xếp và hợp nhất tất cả các tệp đi kèm để bớt rối hơn Ống dẫn quạt và giá đỡ quạt mới Tùy chọn mới cho xe X tương thích BEAR hoặc STOCK Bánh răng 56 răng một mảnh mới ### Cập nhật 07/09/2019: Cập nhật hướng dẫn cho firmware 3.8.0 ### Cập nhật 04/08/2019: Thêm phiên bản MMU2 Cập nhật khuyến nghị vật liệu cho thân/vỏ bộ đùn và xe X thành ABS ### Cập nhật 24/06/2019: Làm chắc giá đỡ PINDA để bớt bị võng hơn ### Lợi ích: Ít bị truyền nhiệt từ động cơ sang sợi nhựa hơn nhiều Độ tuyến tính của bộ đùn được cải thiện Khối lượng bộ đùn nhẹ hơn (do sử dụng động cơ nhỏ hơn) Giá đỡ PINDA chắc chắn hơn, ít bị võng hơn Tầm nhìn vòi phun được cải thiện Trông ngầu ### Ghi nhận: Ý tưởng cho loại mod bộ đùn này đến từ người dùng guy-k2, còn được biết đến với tên BunnyScience trên thingiverse: https://forum.prusaprinters.org/forum/profile/94779/ https://www.thingiverse.com/BunnyScience/about Nhiều mô hình này đã được điều chỉnh/remix từ các tệp .step của bộ đùn MK3 N4A-XT được tối ưu hóa do người dùng butterworthdesign tạo ra: https://forum.prusaprinters.org/forum/profile/70771/ https://www.myminifactory.com/object/3d-print-butterworth-design-prusa-mk3-mk3s-r4-extruder-mod-filament-path-alignment-and-indirect-mk3-filament-sensor-86329 ### Hướng dẫn in ### Cài đặt in được khuyến nghị: Khuyến nghị PETG cho tất cả các bộ phận ABS hoặc các vật liệu chịu nhiệt cao khác cũng hoạt động tốt 4 lớp vỏ Đầu phun 0.40 Lớp 0.20 Lớp 0.10 cho cửa giữ trục MMU2 20% hoặc nhiều hơn mật độ ruột Các bộ phận này yêu cầu vật liệu hỗ trợ (không sử dụng hỗ trợ tự động, đặt vật liệu hỗ trợ thủ công):
- Giá đỡ động cơ
- Thân bộ đùn
- Giá đỡ bánh răng
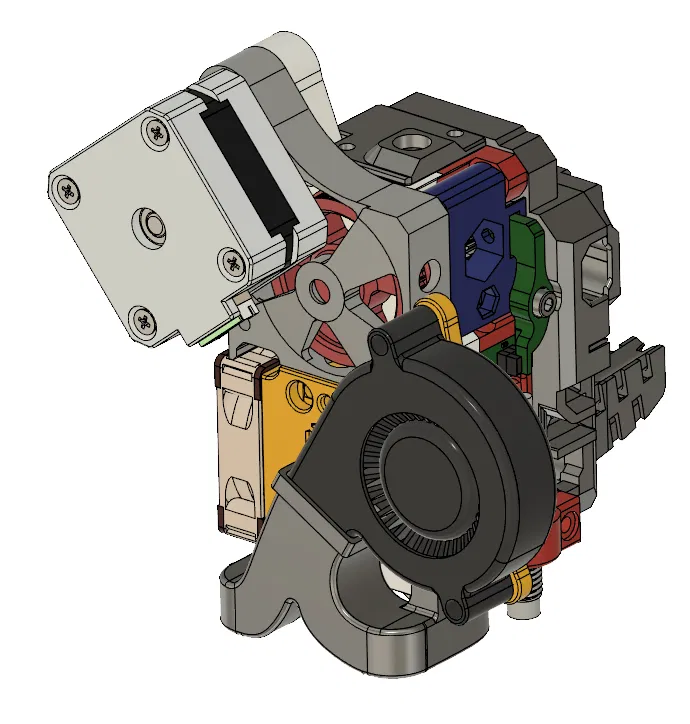
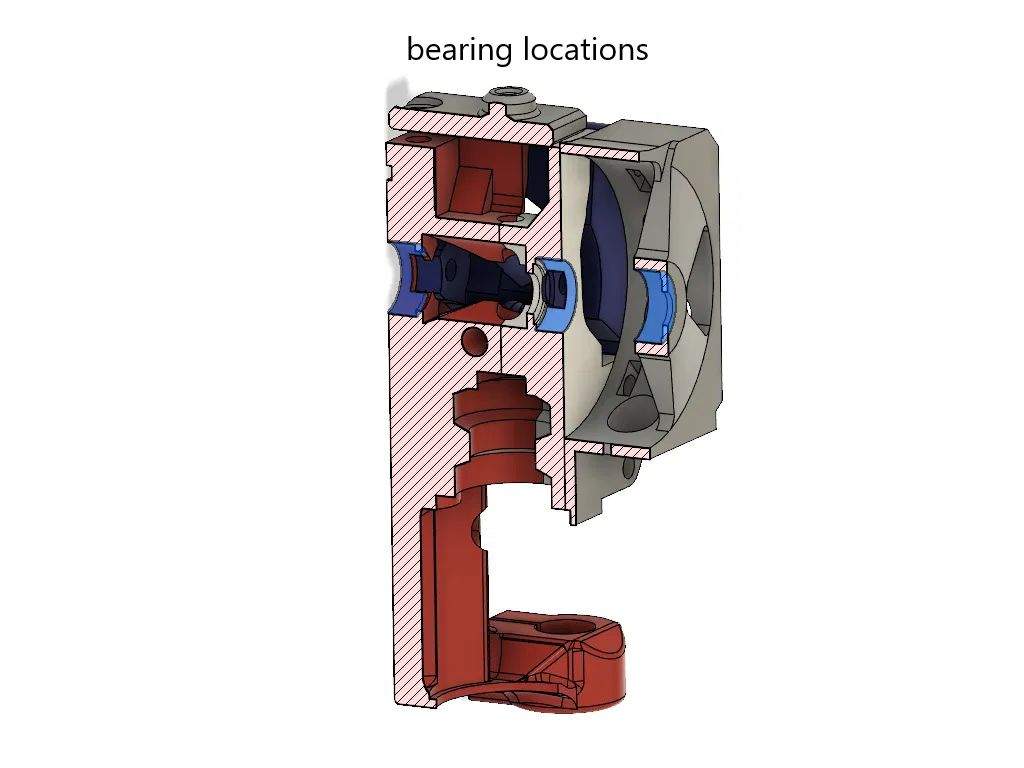
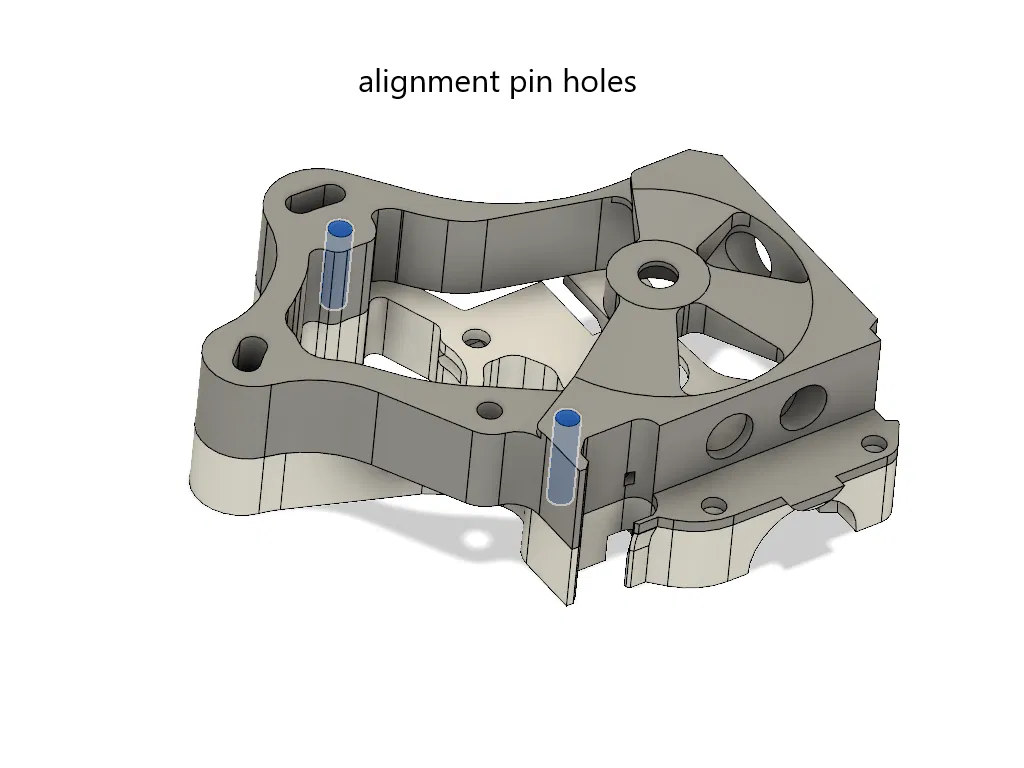
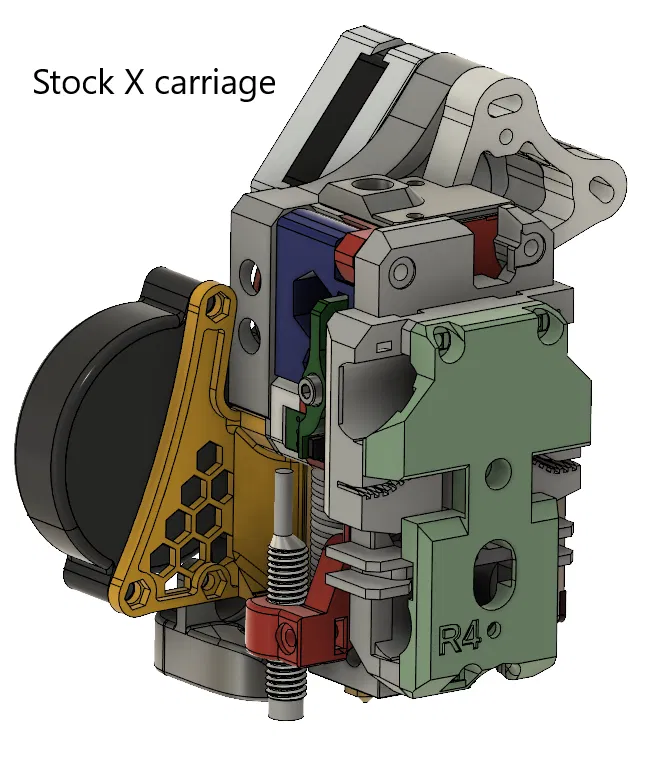
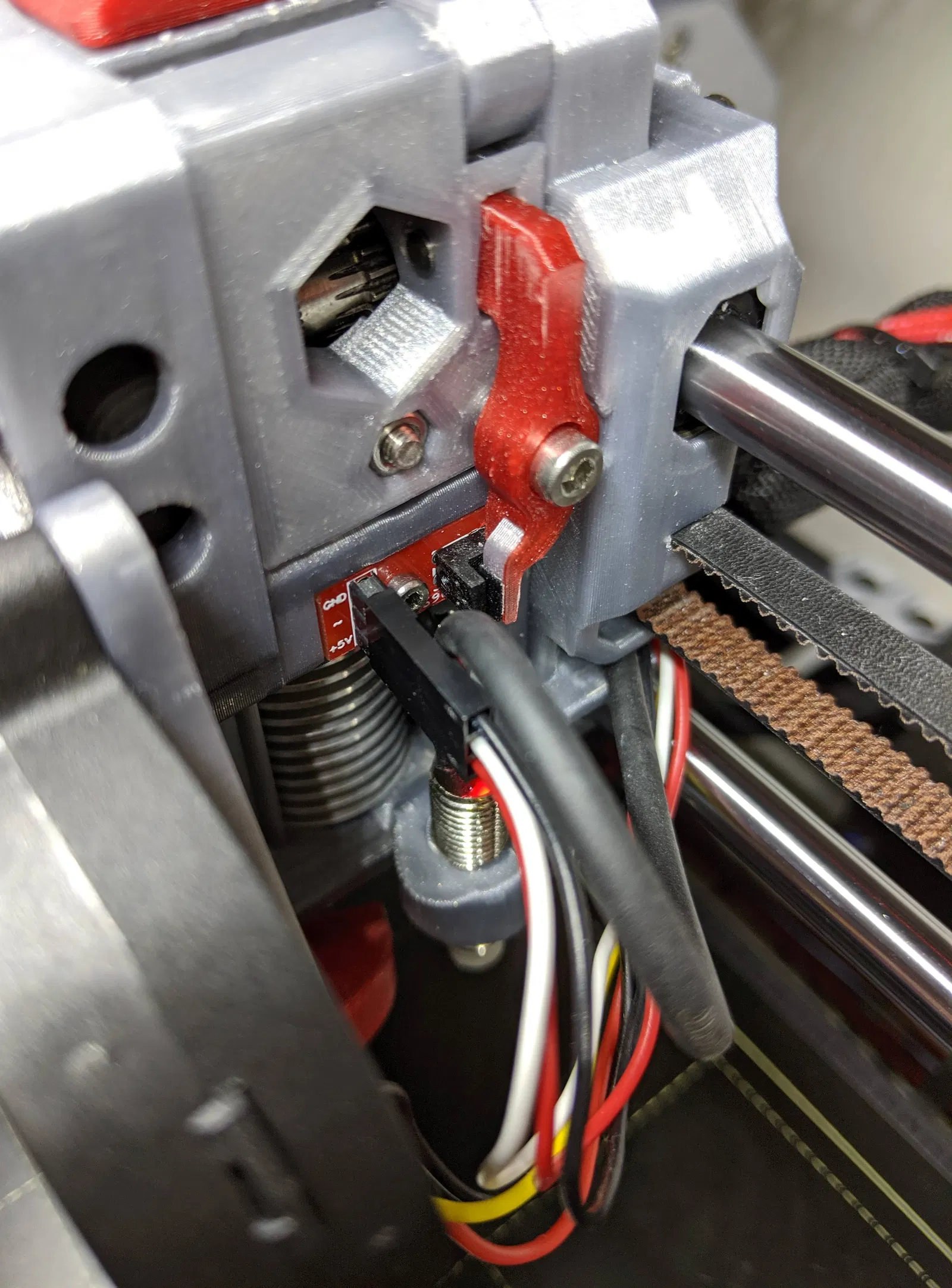
- Ống dẫn quạt ### Tệp đính kèm: Có 3 cấu hình cơ bản của bộ đùn Delta-P, mỗi cấu hình có tùy chọn xe X STOCK hoặc BEAR: MK3-STOCK-complete.3mf MK3S-STOCK-complete.3mf MMU2-STOCK-complete.3mf MK3-BEAR-complete.3mf MK3S-BEAR-complete.3mf MMU2-BEAR-complete.3mf ### Các tệp STEP cũng được bao gồm để dễ dàng remix: MK3-STOCK-complete.step MK3S-STOCK-complete.step MMU2-STOCK-complete.step MK3-BEAR-complete.step MK3S-BEAR-complete.step MMU2-BEAR-complete.step ### Phần cứng yêu cầu: Nhiều loại vít 3mm Đai ốc vuông 3mm Đai ốc lục giác 3mm 1x vít định vị 3mm 2x trục thép 3mm x 25mm 1x trục thép 5mm x 45mm 1x bánh răng thời gian 16 răng x 8mm, lỗ 5mm 1x đai thời gian 140 răng x 6mm loại kín 2GT 3 x vòng bi 1050ZZ Động cơ bước, mã: 17HS10-0704S 1x vòng bi bạc đạn có bích MF63zz (chỉ MK3) 1x vít định vị M3x6 (chỉ MK3) 1x lò xo từ bút bi (đường kính ngoài khoảng 4.18, đường kính trong 3.4, dài 16.25) (chỉ MMU2) 1x trục thép 3mm x 8mm (chỉ MMU2) 1x đai ốc khóa 3mm (chỉ MMU2) 1x vít 2mm (chỉ MMU2) 1x ống PTFE đường kính ngoài 4mm, đường kính trong 2mm, dài 13mm (chỉ MMU2) ### Cảm biến sợi nhựa: Cảm biến IR được lắp tương tự như trên MK3S gốc. Hướng dẫn cho cảm biến laser có tại đây: https://www.myminifactory.com/object/3d-print-butterworth-design-prusa-mk3-mk3s-r4-extruder-mod-filament-path-alignment-and-indirect-mk3-filament-sensor-86329 Hướng dẫn cho cảm biến IR MMU2 ở bên dưới. ### Trục bánh răng: Bạn sẽ cần mài các mặt phẳng trên trục để gắn vít định vị trên bánh răng và bánh răng Bontech. Nếu trục không vừa với vòng bi, bạn có thể kẹp nó vào máy khoan và chà nhám bằng giấy nhám 400 cho đến khi vừa. ### Vòng đệm bánh răng: Định hướng bánh răng sao cho lỗ cho đai ốc vuông hướng ra phía sau bộ đùn. Vòng đệm đặt ở mặt sau của bánh răng với đường kính lớn hơn áp vào bánh răng. Xem các tệp .step. ### Chốt định vị: Có hai bộ lỗ cho chốt định vị 3mm x 25mm giữa giá đỡ động cơ và giá đỡ bánh răng. Các chốt này ép các bộ phận vào đúng vị trí và đảm bảo vòng bi bánh răng của bạn thẳng hàng. Chúng có độ khít cao và bạn sẽ cần dùng lực để lắp chúng. Sử dụng một chốt dẫn hướng nếu bạn cần tháo chúng ra. Đừng cố gắng cạy các bộ phận ra khi chốt vẫn còn vị trí, bạn sẽ làm hỏng chúng đấy (hỏi tôi xem tôi biết thế nào). ### Xe X: Cẩn thận đừng để trục bánh răng chìa ra quá xa về phía sau và cản trở xe X. ### E-Steps: Rất quan trọng! Cập nhật EEPROM của máy in để tính đến tỷ lệ truyền động bị giảm bằng cách thực hiện các lệnh sau trong terminal: Đối với Firmware 3.7.2 trở lên: M350 E16 M92 E490 M500 Đối với Firmware cũ hơn: M92 E980 M500 Giải thích Gcode: M350 Exx đặt microstep cho bộ đùn M92 Exxx đặt eSteps cho bộ đùn M500 lưu cài đặt vĩnh viễn vào EEPROM. Bạn có thể kiểm tra lại cài đặt đã lưu bằng cách gửi lệnh M503 ### Cấu hình cảm biến IR MMU2: ĐỌC KỸ NHÉ Tín hiệu cảm biến bị đảo, do đó cần firmware tùy chỉnh HOẶC cảm biến IR tùy chỉnh. Nhấp vào đây để xem firmware tùy chỉnh: https://github.com/teookie/Prusa-Firmware/releases/tag/3.9.0 HOẶC Nhấp vào đây để xem cảm biến IR tùy chỉnh: https://easyeda.com/teookie/inverted-ir-sensor Một trong hai (firmware tùy chỉnh hoặc cảm biến tùy chỉnh) là bắt buộc, KHÔNG PHẢI CẢ HAI. Chọn phương pháp mà bạn thấy dễ nhất. Hiện tại tôi đang chạy cảm biến IR tùy chỉnh, nhưng trước đó tôi đã chạy firmware tùy chỉnh trong vài tháng. Nếu bạn chọn sử dụng firmware tùy chỉnh, bạn sẽ cần tháo đầu cắm 90 độ ra khỏi cảm biến IR gốc và thay thế nó bằng đầu cắm thẳng, hoặc hàn dây trực tiếp vào bảng mạch. Quy trình hiệu chuẩn cảm biến IR MMU2:
- Đảm bảo bánh răng bontech không dính sợi nhựa
- Vặn ốc cần gạt ra cho đến khi lá cờ hoàn toàn nằm ngoài cổng cảm biến IR
- Sử dụng menu trạng thái cảm biến trên LCD để xác minh cảm biến IR đang đọc "1"
- Vặn từ từ ốc cần gạt vào cho đến khi trạng thái cảm biến thay đổi thành "0"
- Làm nóng vòi phun lên 215° C
- Sử dụng octoprint hoặc terminal để xoay động cơ bộ đùn
- Xác minh rằng trạng thái cảm biến vẫn là "0" trong một vòng quay hoàn chỉnh của bánh răng bontech; nếu trạng thái dao động giữa 0 và 1, hãy vặn ốc vào một chút cho đến khi nó ổn định ở "0" trong một vòng quay hoàn chỉnh.
- Vặn thêm ốc cần gạt thêm 1/16 vòng
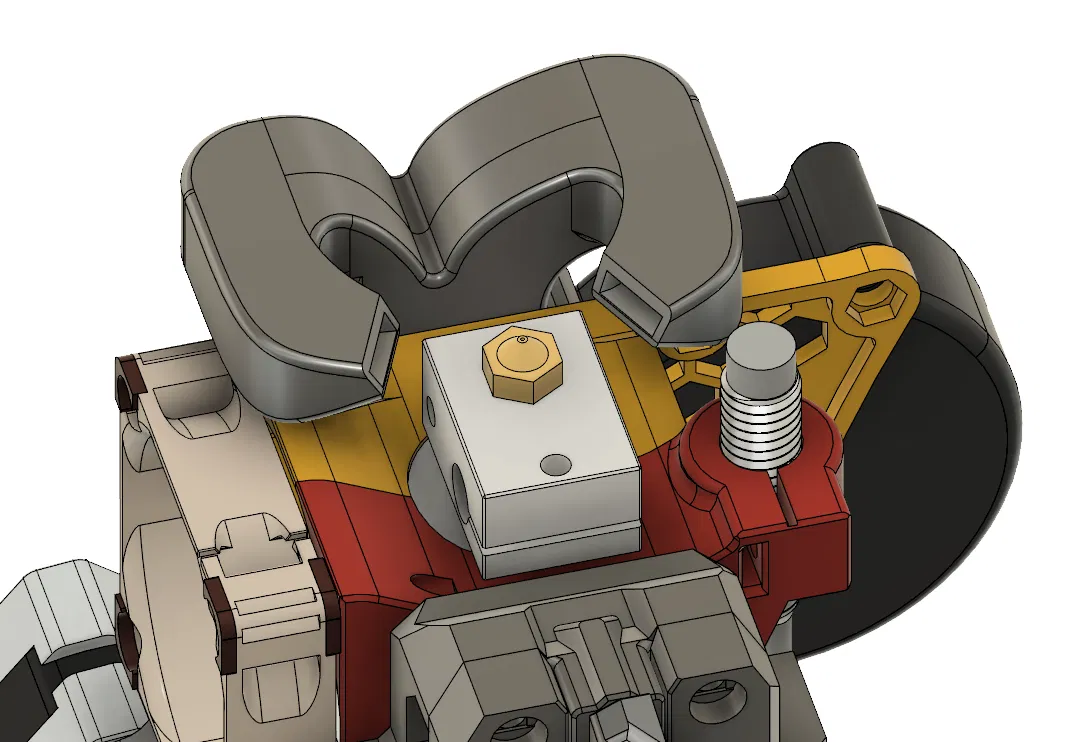
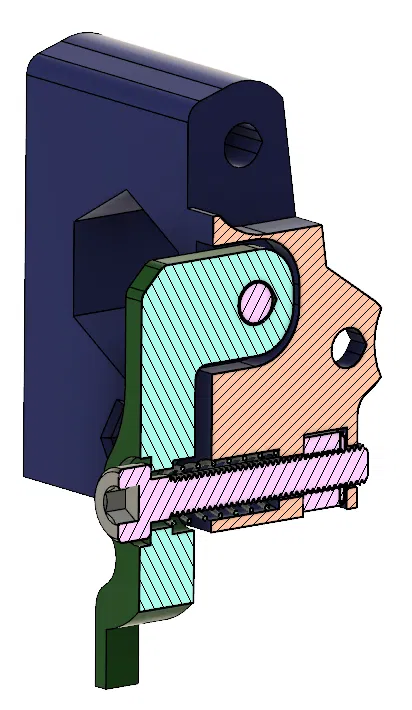
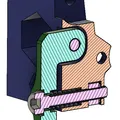
- Hiệu chuẩn hoàn tất ### Thông tin bổ sung MMU2 Xem ảnh để biết mặt cắt cho thấy cần gạt, lò xo và cửa giữ trục ghép lại với nhau như thế nào. Đừng quên đặt ống PTFE vào phía trên bộ đùn dưới lớp vỏ. ### Thêm: Thanh đèn: Nếu bạn muốn có thanh đèn mà không bị cản trở bởi bộ đùn này ở độ cao z tối đa, hãy xem bên dưới:
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...







Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!