Janky Fish Feeder Mk1 - Máy cho cá ăn "cây nhà lá vườn" phiên bản 1

Tự làm máy cho cá ăn "janky" phiên bản 1 bằng Arduino và servo SG90 để cho chú cá Rainbow Rainbow ăn khi bạn đi vắng. Dự án in 3D đơn giản với PLA, dễ lắp ráp và lập trình.









Mô tả
Mình bắt đầu dự án này như một hoạt động vui vẻ với mấy đứa nhỏ để dạy chúng về thiết kế và in 3D các thứ. Vì chúng mới 5 và 3 tuổi nên cũng không kéo dài được lâu!
Đến một lúc nào đó, chúng mình sẽ đi nghỉ mát và chúng mình có một chú cá beta nhỏ tên là Rainbow Rainbow. Chúng mình cần một cách để cho nó ăn khi vắng nhà, vì vậy chúng mình đã chế tạo cái máy cho cá ăn "janky" này. Nó khá chính xác về số lượng viên thức ăn có thể nạp.
Đây là dự án nhỏ đầu tiên của mình và nó rất, rất sơ sài. Mình không chắc Rainbow Rainbow có sống sót không...
Chúc các bạn may mắn :D
DANH SÁCH MUA HÀNG
Đối với dự án này, bạn sẽ cần một vài linh kiện bổ sung để nó hoạt động.
- Arduino Uno R3
- Servo SG90
- Một vài dây Jumper đực-đực (x3)
- Dây nguồn cho Uno
PHẦN MỀM
Đối với việc lập trình dự án, mình chỉ sử dụng Arduino IDE, đủ cho dự án của chúng mình. Bản thân mã rất đơn giản và mình sẽ thêm nó bên dưới. Ý tưởng chung là thiết lập servo ở 0 độ để bắt đầu, sau đó chờ 1 phút để bạn nạp thức ăn vào. Sau đó, nó sẽ quay một lần để cho ăn rồi chờ 12 giờ cho lần tiếp theo.
#include <Servo.h>
Servo servo;
int angle = 0;
int a;
int feeding;
int min2ms = 60000;
int sec2ms = 1000;
int angleDelta = 32; // Thêm một chút cho độ lệch
void setup() {
servo.attach(8);
// Thiết lập ở góc zero, sau đó chờ 3 phút để cho thức ăn vào
servo.write(angle);
delay(60000);
}
void loop()
{
int currentAngle = angle;
// Lặp lại 6 lần cho ăn
for(feeding = 0; feeding < 6;feeding++){
// Đầu tiên chúng ta sẽ di chuyển nó 30 độ với tốc độ 3 giây
for(a = currentAngle; a < currentAngle + angleDelta; a++)
{
servo.write(a); // Quay servo
delay(100); // 3 giây mỗi vòng
}
currentAngle = currentAngle + angleDelta;
// delay(1000);
delay(43200000); // 12 giờ
}
}CÁCH LẮP RÁP VÀ SỬ DỤNG
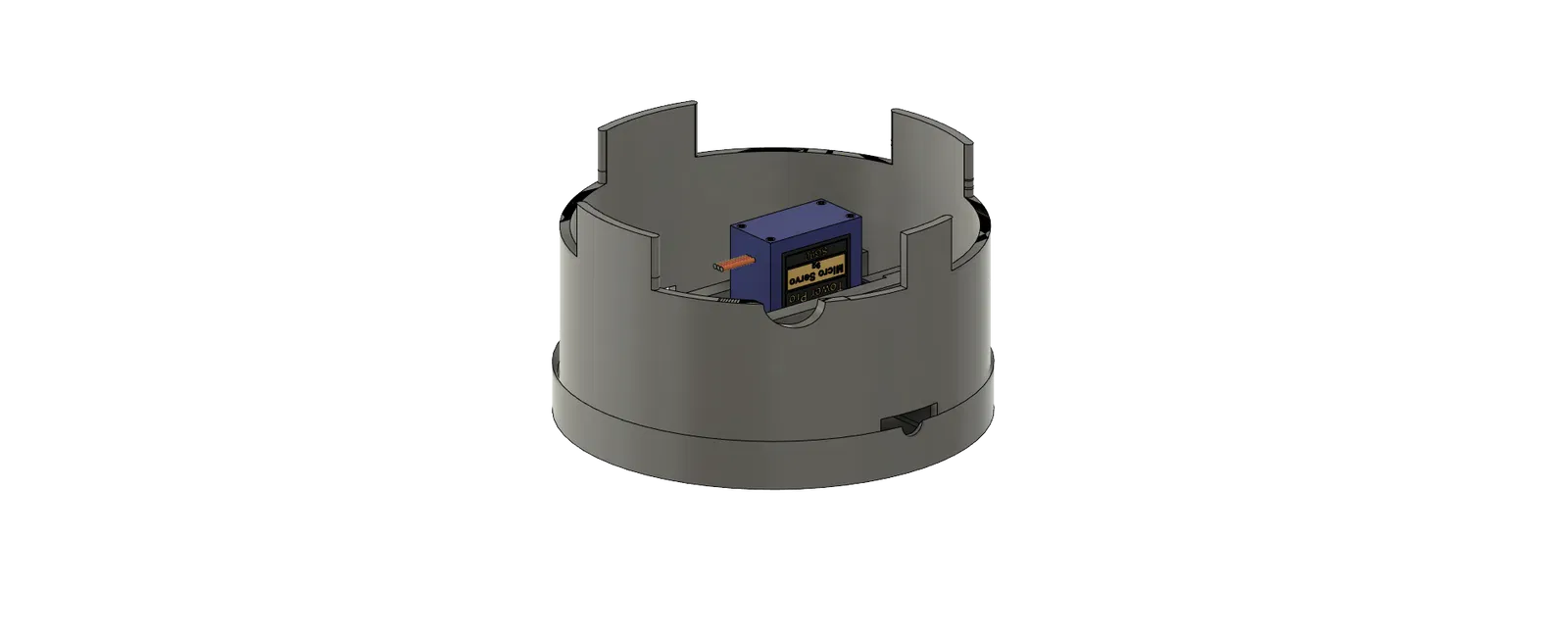
Việc lắp ráp chỉ đơn giản là đặt phần quay đáy (nhiều lỗ) vào tấm đáy. Sau đó trượt nó vào phần thân chính. Video bên dưới sẽ hướng dẫn cách nạp thiết lập!
LƯU Ý KHI IN
Mình đã sử dụng PLA màu đen cho cái này. Dung sai tổng thể thì ổn, nhưng bạn có thể tăng tỷ lệ Tấm đáy lên 102% nếu thấy nó quá chật. Chỉ cần dùng giá đỡ cho phần thân chính.
Mình đã sử dụng một vỏ Arduino có sẵn trong thiết kế này:
https://www.thingiverse.com/thing:628929
Cài đặt in
Rafts
Không
Supports
Có
Độ phân giải
0.2 mm
Infill
20-25 %
Filament
PLA
Ghi chú
Vật liệu không an toàn với máy rửa bát.
Giấy phép

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!