EQM35 Pro Belt Mod - Skywatcher

Cải tiến ngàm EQM35 Pro bằng bộ truyền động dây đai để hoạt động đúng cách. Bài viết hướng dẫn chi tiết cách thay đổi tỷ lệ bánh răng cho trục RA và Dec bằng các puly và động cơ khác nhau, kèm theo danh sách bộ phận cần thiết.







Mô tả
Tìm thấy trên một diễn đàn không có phản hồi nào để chia sẻ - muốn chia sẻ với thế giới. EQM35 Belt Mod.
Tôi đang sử dụng bộ điều khiển động cơ EQM35 tiêu chuẩn mà không có thay đổi nào đối với cài đặt EQMOD.
Mục tiêu của bài tập này là đạt được tỷ lệ tương tự như các tỷ lệ được mã hóa cứng vì ngay từ đầu tôi đã nhận ra rằng không có gì tôi có thể làm để thay đổi chúng. Trên trục RA, tôi đã thực hiện với các puly răng 48 & 12 (tỷ lệ 4:1, như trong bộ truyền bánh răng ban đầu). Trên trục Dec, tôi đã sử dụng puly răng 66 & 12, nhưng tỷ lệ đó là 5,5:1 và sẽ chạy ở tốc độ gấp đôi yêu cầu vì tỷ lệ ban đầu là 11:1, vì vậy tôi đã giảm một nửa tốc độ bằng động cơ 0,9 độ thay cho động cơ 1,8 độ. Tôi đã chọn 66 & 12 (tức là 5,5:1) đặc biệt vì tôi có thể giảm một nửa tốc độ động cơ. Tôi cũng có một bộ 55 và 10 đang trên đường về từ Trung Quốc (và một bộ 66, đi cùng với bộ 12, phòng trường hợp...)
Danh sách các bộ phận cho toàn bộ công việc:
Trục RA
Động cơ NEMA 17 1,8 độ. Bạn có thể tái sử dụng động cơ hiện có (tôi đã thay thế động cơ của mình vì nó bị hỏng)
Puly răng GT2 12 răng – trục 5mm (cho dây đai rộng 6mm)
Puly răng GT2 48 răng – trục 6mm (cho dây đai rộng 6mm)
Dây đai răng GT2 dài 158mm (rộng 6mm)
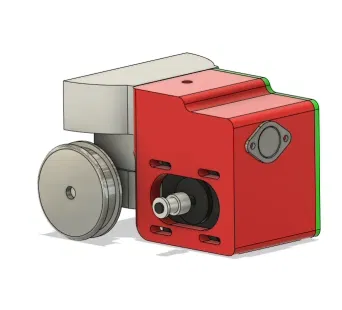
Giá đỡ tùy chỉnh và vỏ ổ cắm
2x vít cánh hoa M5 (5mm x 15mm) (bu lông M5 tiêu chuẩn cũng được nếu bạn không quá cầu kỳ) + 2x đai ốc M5 + các bu lông hiện có để gắn động cơ (thêm một số vòng đệm)
Trục Dec
Động cơ NEMA 17 0,9 độ (có thể dùng NEMA 14 nếu bạn có phiên bản 0,9 độ, nhưng động cơ stock cần được thay thế ở đây. Giữ nó làm phụ tùng phòng trường hợp động cơ RA của bạn bị hỏng)
Puly răng GT2 12 răng có trục 5mm (hoặc 10 răng - nhưng chưa thử)
Puly răng GT2 66 răng có trục 6mm (hoặc 55 răng nếu dùng 10 răng ở trên)
Dây đai GT2 dài 200mm rộng 6mm (hoặc 196mm)
Giá đỡ động cơ và vỏ ổ cắm tùy chỉnh
1x đai ốc M5 + các bu lông hiện có để gắn động cơ (thêm một số vòng đệm).
Bộ truyền động RA như sau:
- 12 răng trên bánh răng dẫn động (gắn vào động cơ) - gọi là bánh răng A
- 48 răng trên bánh răng dẫn động đầu tiên - bánh răng B
- 35 răng trên bánh răng đồng trục gắn chặt với nó - bánh răng C
- 35 răng trên bánh răng dẫn động cuối cùng (gắn vào trục vít) - bánh răng D
Bánh răng A dẫn động bánh răng B. Bánh răng C quay cùng bánh răng B vì chúng được gắn đồng trục với nhau. Bánh răng C dẫn động bánh răng D. Vì vậy:
- 1 vòng quay của bánh răng D yêu cầu 1 vòng quay của bánh răng C (cả hai đều có 35 răng).
- 1 vòng quay của bánh răng C yêu cầu 1 vòng quay của bánh răng B, vì B và C đồng trục
- 1 vòng quay của bánh răng B (48 răng) yêu cầu 4 vòng quay của bánh răng A (12 răng)
Từ tất cả những điều trên, 1 vòng quay của trục vít (bánh răng D) yêu cầu 4 vòng quay của bánh răng A, do đó tỷ lệ là 1:4
Đối với trục Dec, bộ truyền động là:
- 12 răng trên bánh răng A (gắn vào động cơ)
- 66 răng trên bánh răng B
- 35 răng trên bánh răng C (đồng trục và gắn với bánh răng B).
- 70 răng trên bánh răng D (gắn vào trục vít)
Giống như trục RA, Bánh răng A dẫn động bánh răng B. Bánh răng C quay cùng bánh răng B vì chúng được gắn đồng trục với nhau. Bánh răng C dẫn động bánh răng D.
- 1 vòng quay của bánh răng D yêu cầu 2 vòng quay của bánh răng C (70:35)
- 2 vòng quay của bánh răng C yêu cầu 2 vòng quay của bánh răng B (đồng trục)
- 2 vòng quay của bánh răng B yêu cầu 11 vòng quay của bánh răng A (66:12)
Vì vậy, 1 vòng quay của trục vít (bánh răng D) yêu cầu 11 vòng quay của bánh răng A, do đó tỷ lệ là 1:11
Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!