Ngàm DVL A50 cho BlueROV2

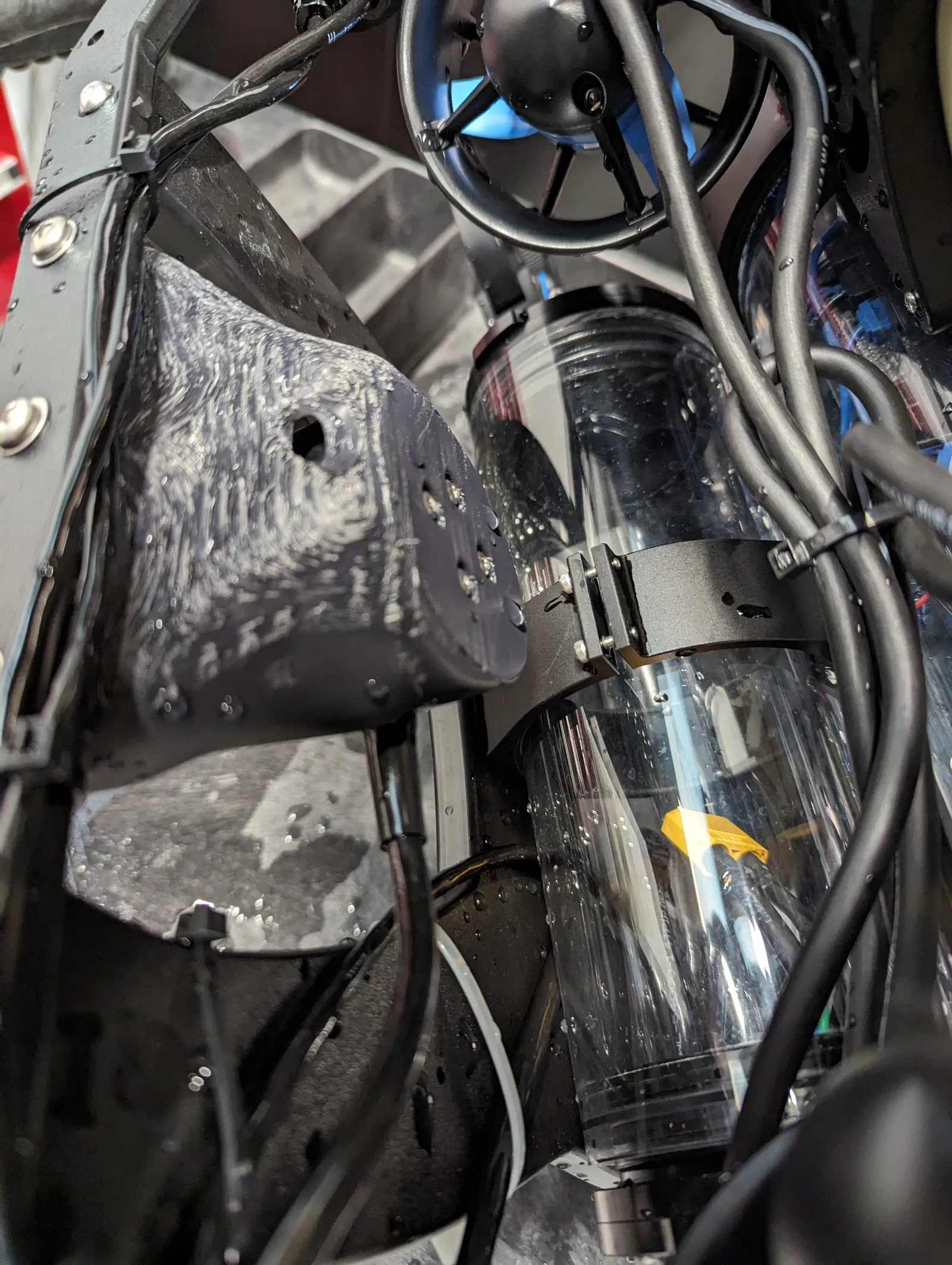
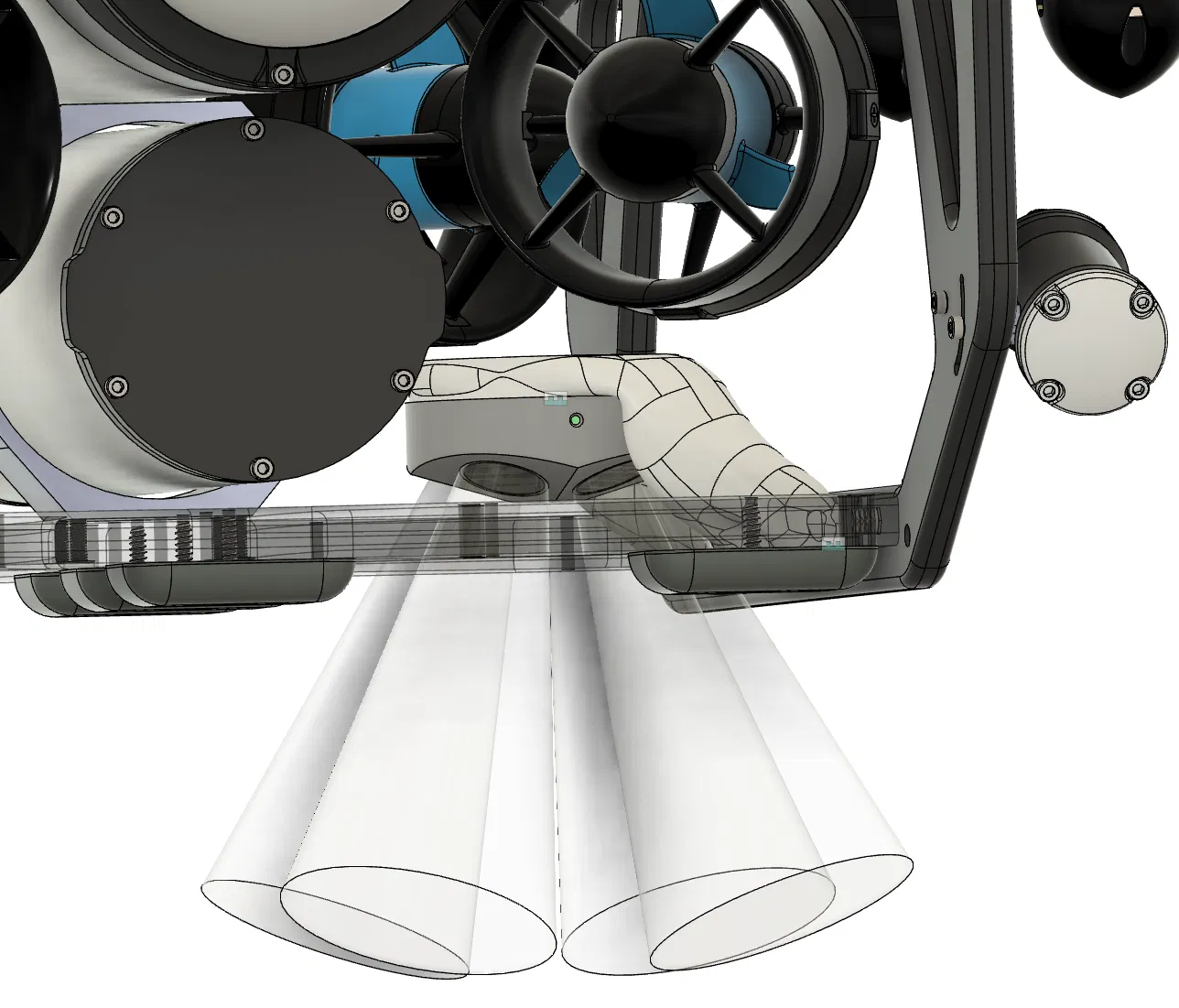
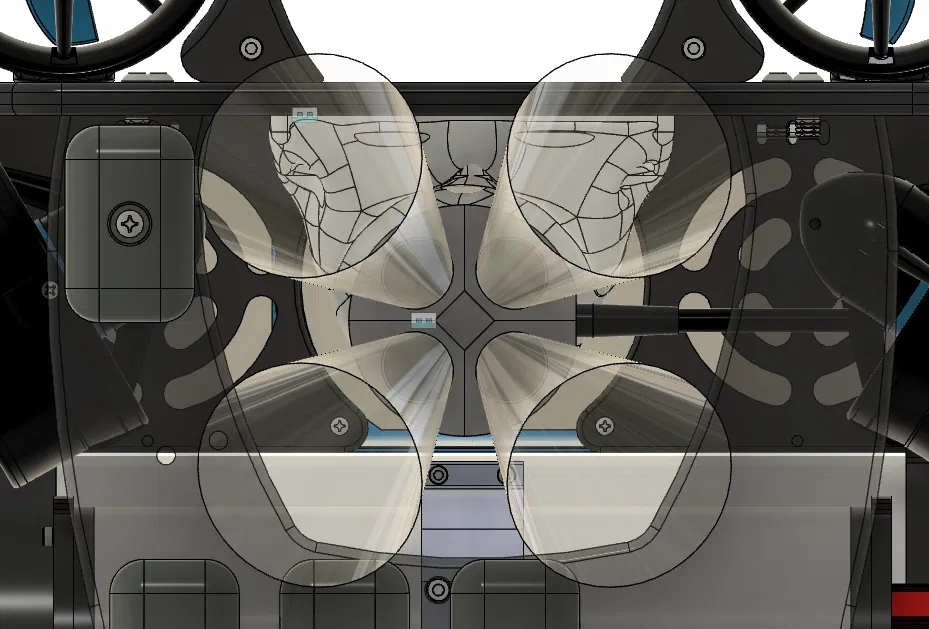
Ngàm DVL A50 được thiết kế bằng thuật toán cho tàu lặn BlueROV2. Ngàm này sử dụng các lỗ bắt ốc có sẵn trên khung, không cần khoét thêm lỗ. In ở góc 45 độ, 4 lớp tường và 50% lớp độn trong để đảm bảo độ bền.
213
Lượt Xem
1
Lượt Thích
17
Lượt Tải
Cập Nhật Dec 14, 2025




Mô tả
Tụi mình rất thích xài DVL A50 trên cái @BlueRobotics BlueROV2 Heavy của tụi mình, mà có điều là không thích cái vụ phải khoét lỗ trên khung để gắn cái cảm biến này. Vì vậy, mình đã thiết kế một cái ngàm sử dụng các lỗ bắt ốc có sẵn trên khung để gắn nó vô.
Tui in nó ở góc 45 độ để mấy cái đường lớp in không bị yếu ở bất kỳ hướng nào. Tui cũng in với 4 lớp tường (walls) và 50% lớp độn trong (infill).
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Đang tải files, vui lòng chờ...

Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!