Adapter Truyền Động Trực Tiếp HeroMe v5 cho Ender 3

Chuyển đổi động cơ nema và bộ đùn zin của bạn sang direct drive cho đầu in heroMe v5 trên Ender 3. Giúp giảm trọng tâm động cơ, hạn chế rung lắc. Sử dụng phần cứng zin, in cứng cáp với độ dày ruột 40%+, 4+ lớp vỏ. Cần ống Bowden nối bộ đùn và đầu in.



Mô tả
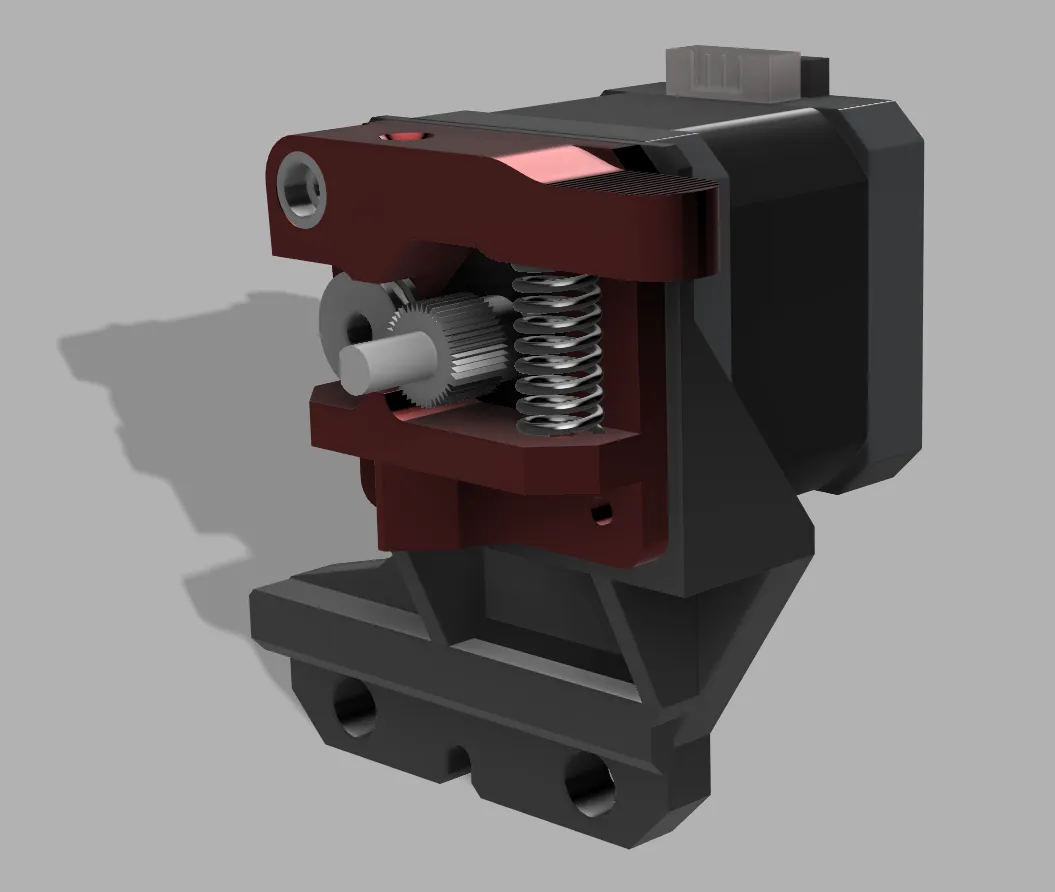
Đây là một bộ adapter để chuyển đổi động cơ nema và bộ đùn nhựa zin của bạn sang dạng direct drive cho đầu in heroMe của bạn.
Vì heroMe, đặc biệt là gen5, đẩy đầu in ra xa khỏi trục Y hơn, nên động cơ đùn nhựa sẽ không bị cạ vào khung sườn, cho phép lắp theo cách này. Tất cả những điều này được thực hiện để đưa trọng tâm của động cơ nằm trên các trục ray và giảm thiểu mô-men xoắn được tạo ra do trọng lượng của động cơ.
Sử dụng phần cứng, ốc vít... nguyên bản. Bản in phải cứng cáp nên tôi khuyên bạn nên dùng độ dày ruột 40% trở lên với 4+ lớp vỏ. LƯU Ý bạn vẫn sẽ cần một đoạn ống Bowden để nối bộ đùn nhựa với đầu in. Các khớp nối ở cả hai bộ phận phải khớp với nhau.
Cái này có thể dùng cho các bản chuyển đổi heroMe khác cho Ender 3 V1 và V2.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!