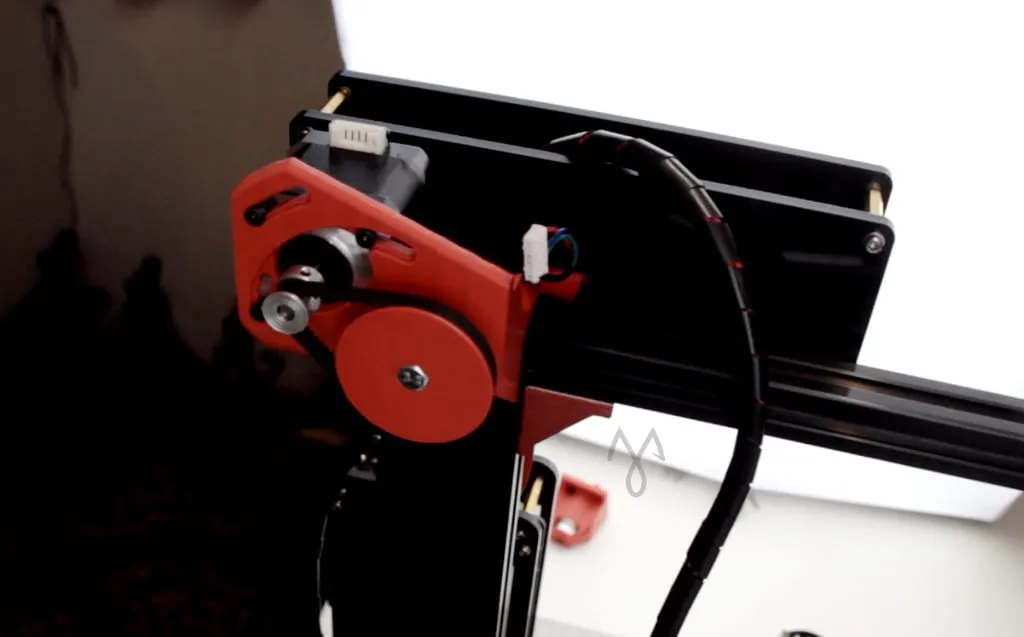
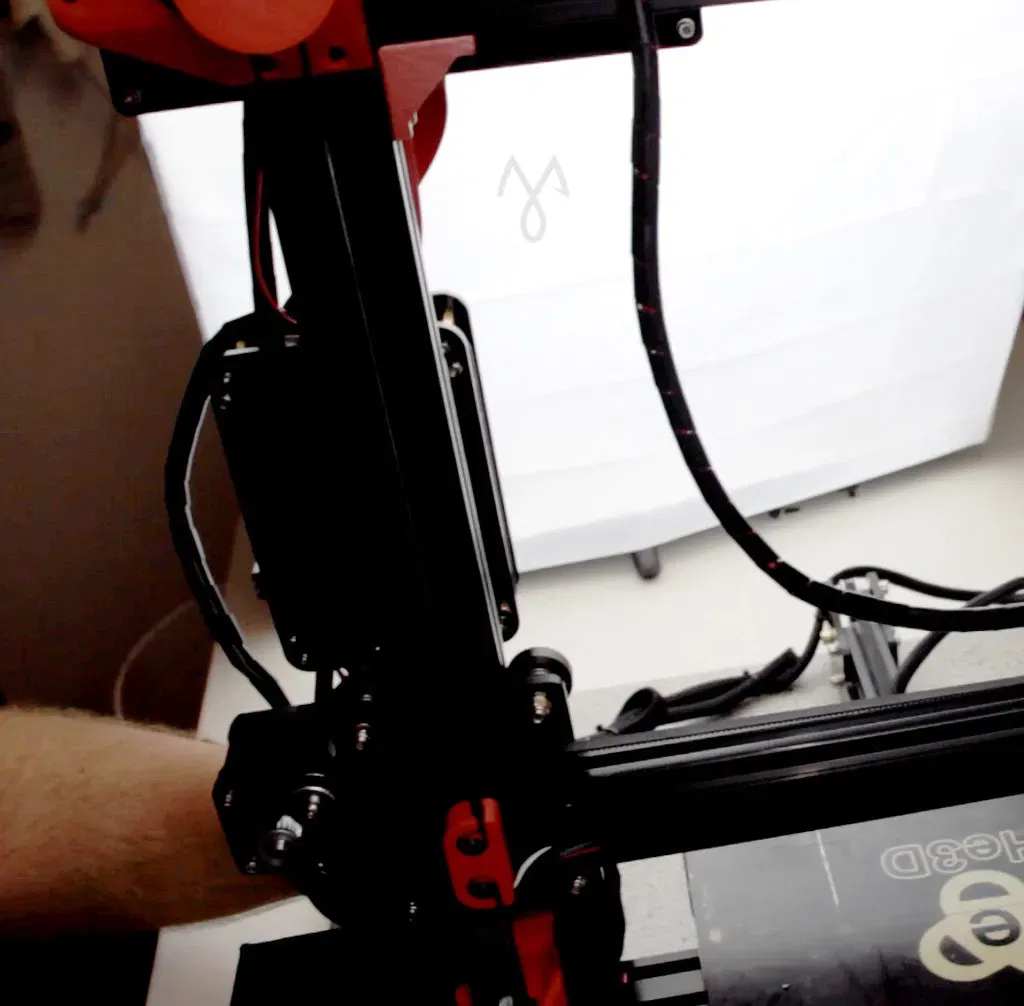
Bộ truyền động dây đai trục Z cho máy in Tarantula

Một cách đơn giản và rẻ tiền để có được các bản in hoàn hảo, lần đầu tiên, bất cứ lúc nào! Quên dấu ngoặc in vô dụng và kép





Mô tả
Một cách đơn giản và tiết kiệm để có được những bản in hoàn hảo, lần đầu tiên, bất cứ lúc nào! Quên đi những giá đỡ in không cần thiết và ốc vít dẫn đôi: một hệ thống truyền động bằng dây đai là lựa chọn tốt nhất, chắc chắn.
BOM:
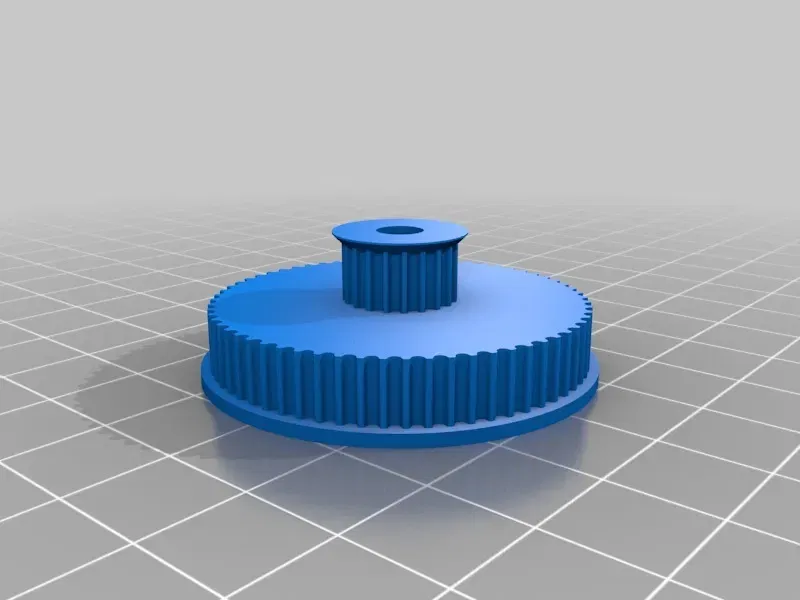
1x pulley GT2 20T
1x pulley idler GT2 20T
1x vòng đai GT2 80T
1m dây đai GT2 6mm
1x ốc vít Hex M5*30mm
3x vòng đệm grover M5
1x đai ốc Nylstop M5
2x vòng bi MF105
1x khoảng cách đồng 6mm (hoặc một chồng vòng đệm)
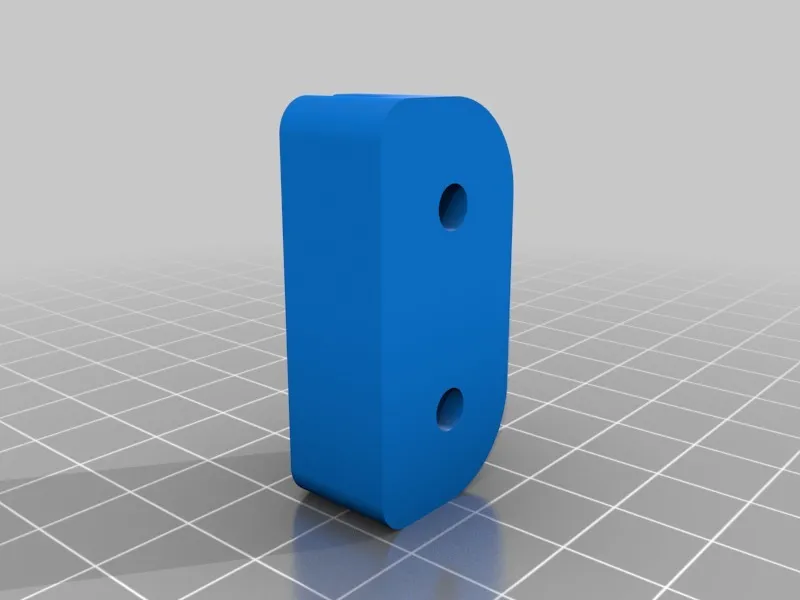
4x ốc vít đầu phẳng hex M310mm DIN9128x M410mm8x đai ốc T cho profile nhôm 2020 6mm*
1x động cơ Nema17 (đề xuất 17hs4401)()Lấy lại từ trục z của Tarantula đã lỗi thời và các bộ phận dự phòng trong bộ kit
Video lắp ráp: https://youtu.be/IgWcZoRDe20
Giá đỡ cho E3D Titan + V6 + quạt 5015 có thể được tìm thấy ở đây: https://www.thingiverse.com/thing:2624164
Ngày 3 tháng 6 năm 2018: Gần đây tôi đã có cuộc trò chuyện với một nhà sản xuất đã trải qua một sự cố nhỏ khi cần cẩu rơi vào cuối chuỗi in. Đây là câu trả lời của tôi:
"Khi dòng giữ của động cơ Z được tắt, trọng lượng tổng thể của cần cẩu vượt quá quán tính của rotor động cơ và có một chút rơi của cần cẩu. Tôi đã trải qua điều tương tự khi tôi nâng cấp máy in của mình lên một bộ cấp liệu trực tiếp nặng hơn. Tôi có thể sống với điều đó, nhưng miễn là tôi có một cái trên kệ, tôi đã nâng cấp động cơ Z của mình lên một động cơ dài hơn (17HS8401) và quán tính rotor đủ để giữ toàn bộ trọng lượng của cần cẩu. Nếu bạn không muốn chi 13€ cho một động cơ mới, một giải pháp khác có thể là ước lượng 'khoảng cách giải phóng' (4 milimét ở đây) và chèn một lệnh nâng Z vào chuỗi kết thúc gcode của bạn trước khi giải phóng dòng giữ (lệnh M18).
Một cách để tránh hoàn toàn vấn đề này là sử dụng tỷ lệ lớn hơn trên việc giảm dây đai. NHƯNG, bạn không thể xác định loại động cơ nào nên được sử dụng trong hệ thống. Cân nhắc rằng các động cơ nhỏ nhất sẽ dẫn đến một số bộ phận in lớn, dây đai vòng khép kín dài hơn và tốc độ trục Z chậm hơn nhiều... Nhân tiện, tôi không biết liệu tôi có thực hiện nâng cấp cho một pulley dây đai 100 hoặc 150mm ở trên máy in của mình hay không."
Tóm tắt : thiết kế của hệ thống truyền động bằng dây đai này, mục tiêu chính là cung cấp đủ độ chính xác để có thể in các lớp mỏng hơn mà không làm chậm quá trình hoạt động so với truyền động bằng vít. Mô-men giữ được xem xét để vượt quá trọng lượng của gantry trong quá trình hoạt động với động cơ được cung cấp trong bộ kit của Tevo (Bộ kit của tôi là của HE3D với cùng động cơ và hướng dẫn).
Lưu ý : sự cố chỉ xảy ra trên một số máy in (gantry nâng cấp, bánh xe không quá chặt...) khi động cơ bị tắt ở cuối một bản in, và không ảnh hưởng đến các bản in, ngay cả trong thời gian in lâu hơn. Tôi đã hoàn thành bản in lớn và phức tạp 43h mà không gặp vấn đề gì.
Ngày 24 tháng 6 năm 2018 : Tôi rất vui khi các nhà sản xuất như LULZBOT thực sự triển khai Trục Z truyền động bằng dây đai trên các máy của họ (Xem LULZBOT Mini 2). Theo ý kiến của tôi, bạn có thể thấy ngày càng nhiều máy in thay thế vít T8 bằng hệ thống trục Z bằng dây đai vì nó giải quyết triệt để hiệu ứng rung lắc Z và làm cho quá trình định vị trở nên nhanh hơn nhiều. Có hai câu hỏi thường gặp về hệ thống này : đầu tiên, làm thế nào mà điều này có thể tốt hơn vít ? Chà, trong khoảng giá này, việc sản xuất vít và đai ốc của nó không chính xác như yêu cầu. Khớp nối linh hoạt mang lại một số vấn đề, đặc biệt là vì vít không được hỗ trợ ở cả hai bên. Vít cần được định vị rất chính xác, điều mà bạn không thể đạt được mà không có công cụ đo của thợ cơ khí và một quy trình thiết lập dài. Thực tế là không có nhược điểm nào khi sử dụng Trục Z truyền động bằng dây đai. Thứ hai, tại sao vẫn giữ việc điều khiển gantry ở một bên khi một trong những nâng cấp phổ biến nhất là một vít ở cả hai bên ? Vấn đề định vị gantry đến từ hệ thống hướng dẫn chứ không phải từ hệ thống điều khiển. Khi bạn thêm một vít thứ hai, bạn giới hạn vấn đề nhưng không chữa trị nó. Khi gantry được hướng dẫn đúng cách, nó chỉ được phép di chuyển theo hướng Z theo cùng một cách ở cả hai bên. Chắc chắn rồi. Vậy ai quan tâm đến hệ thống điều khiển đơn ? Hãy nhớ rằng hầu hết các máy tiện kim loại chuyên nghiệp sử dụng hệ thống điều khiển bằng vít đơn và khá chính xác.
Ngày 3 tháng 10 năm 2019: Đã nhận được một bình luận tốt từ một người dùng lâu năm, cảm ơn về phản hồi Klaus: "Muốn nói cảm ơn một lần nữa vì bản mod này - tôi đã sử dụng nó trong nhiều tháng, và đây là bản mod tốt nhất cho Tarantula mà tôi đã thử. Không có hiện tượng Zbanding, chất lượng in hoàn hảo tuyệt đối trên bề mặt, và microstepping hoạt động tốt nữa :) Đã thực hiện một số thay đổi nhỏ để sử dụng phiên bản bánh răng kim loại thay vì bánh răng in, nhưng thiết kế cơ bản là vững chắc và được thực hiện một cách đáng kinh ngạc."
Ngày 19 tháng 11 năm 2019: Một người bạn đã báo cáo về "vấn đề Z rơi". Thông thường với một động cơ Nema 17 cỡ trung bình, vấn đề này không bao giờ xảy ra. Tôi đã yêu cầu anh ấy mang máy in của mình đến nhà tôi để kiểm tra hoàn toàn. Vấn đề khá đơn giản và tôi không mong đợi điều đó: dây đai Z không được căng đủ. Vì vậy, nếu bạn gặp phải vấn đề Z rơi, hãy chắc chắn rằng dây đai Z của bạn được căng đúng cách.
Cài Đặt In
Máy in:
Prusa I3, Tarantula, CoreXY, FLSun Delta.
Bệ in:
Không
Hỗ trợ:
Không
Độ phân giải:
Vòi phun 0.5mm và nhỏ hơn, lớp 0.2mm
Độ đầy:
Ít nhất 75% (nghĩ về các bộ phận lâu dài)
Ghi chú:
Xin lưu ý rằng puli đôi yêu cầu một máy in được hiệu chỉnh đúng cách để có kết quả tốt nhất.
Sau Khi In
Danh mục: Các bộ phận máy in 3D
Giấy phép

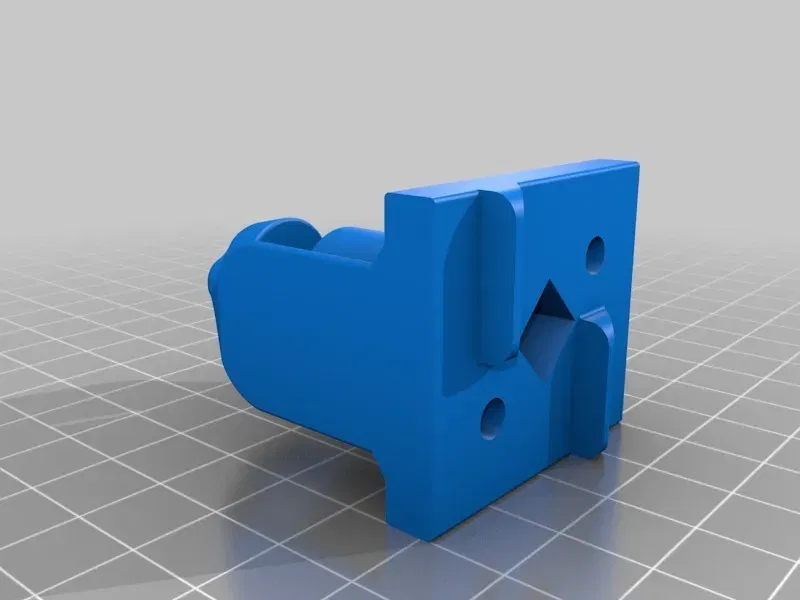
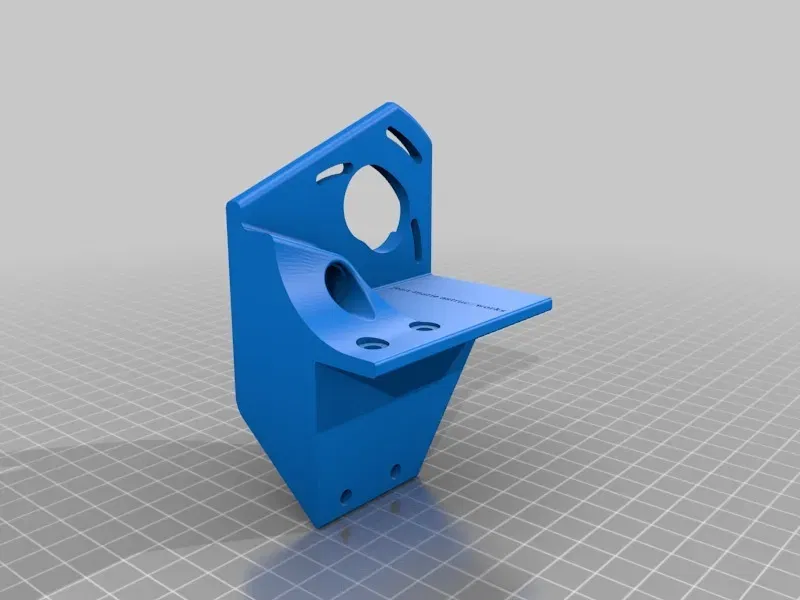
File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!