Hexapod - Robot 6 chân chi phí dưới 100€

Tự tay làm một chú robot hexapod 6 chân với chi phí dưới 100€! Sử dụng 18 servo MG90S, điều khiển ELRS mượt mà cùng khung in 3D cứng cáp. Bắt đầu dự án ngay thôi!
















Mô tả
Hướng dẫn cách làm -----> youtube.com/watch?v=2WKWtY56g3k <----- Hướng dẫn cách làm
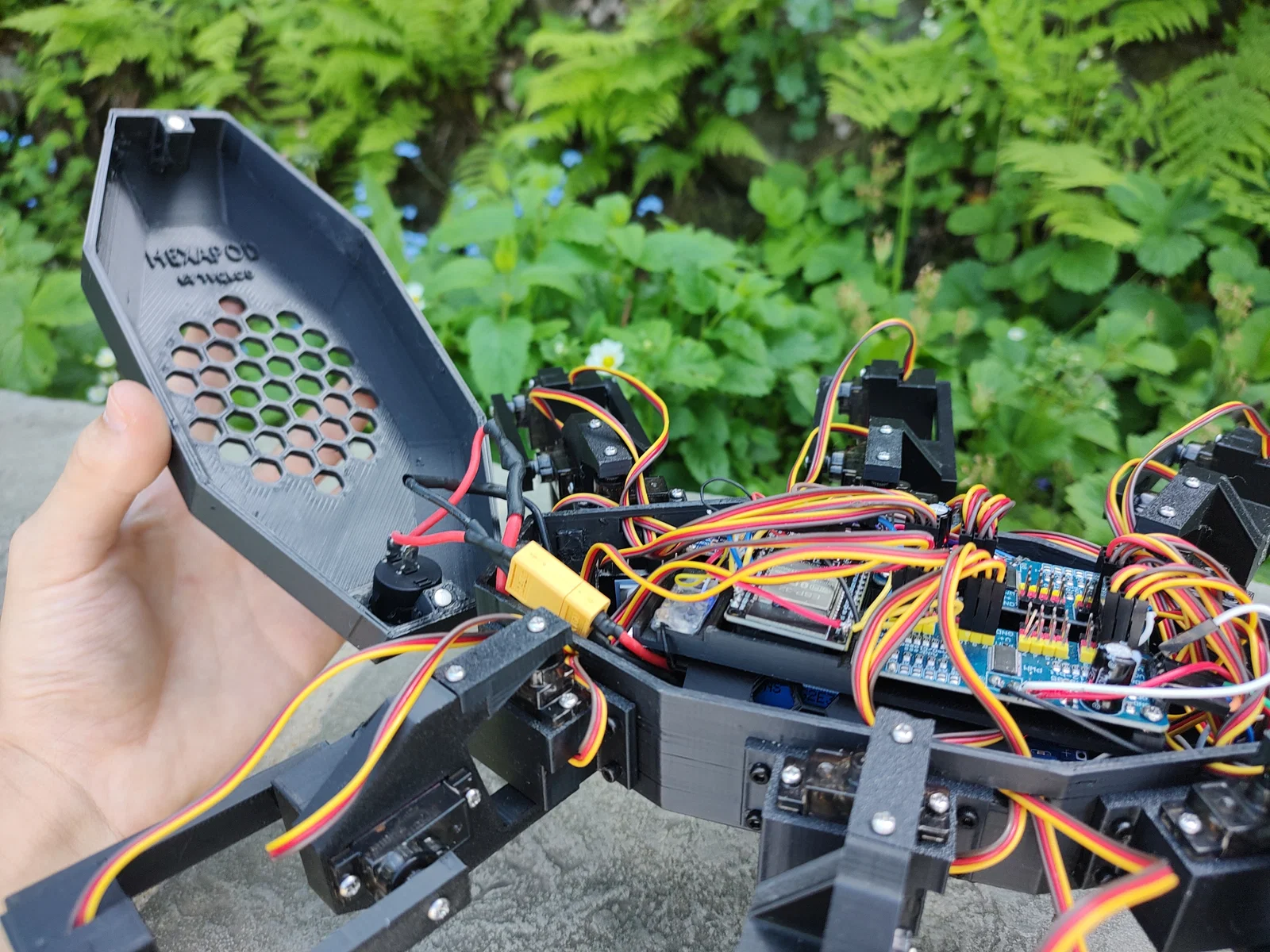
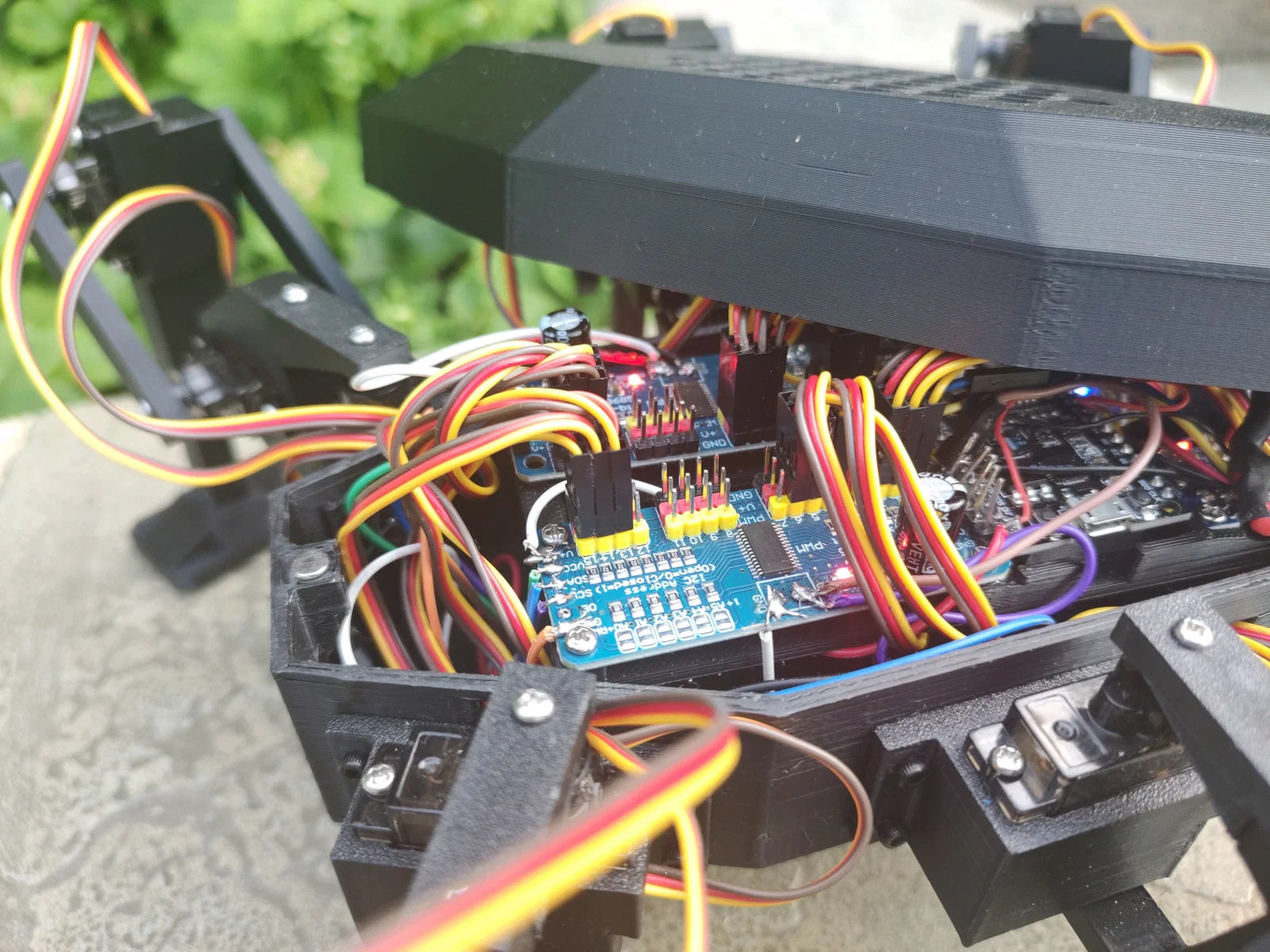
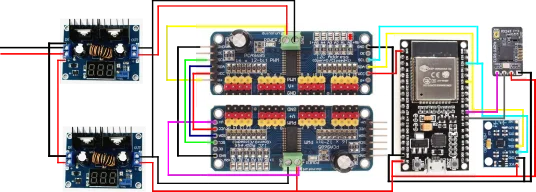
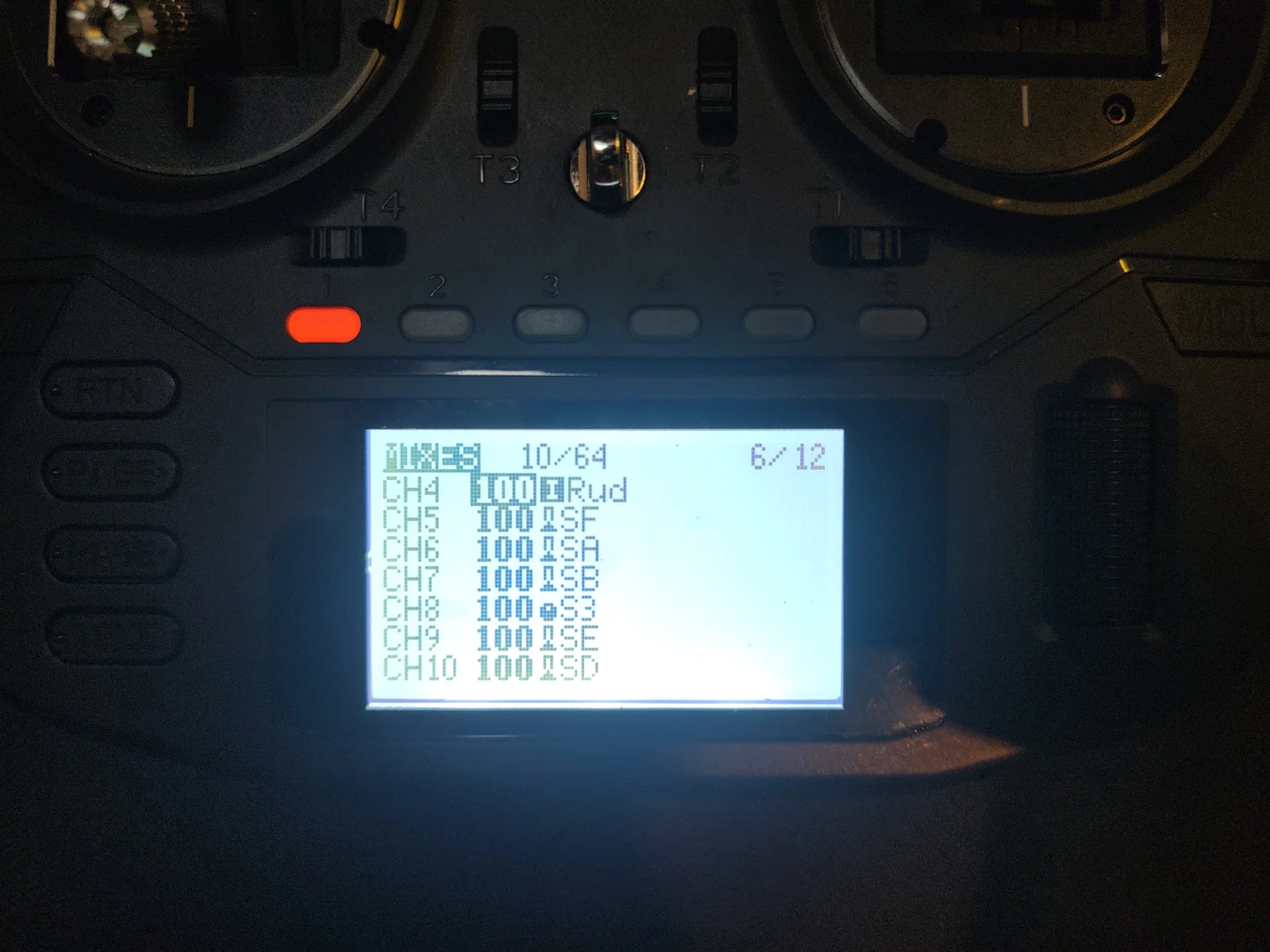
Dự án này giới thiệu một chú robot 6 chân (hexapod) vô cùng mạnh mẽ, được vận hành bởi vi điều khiển ESP32 và hai bộ điều khiển servo PCA9685 giao tiếp qua bus I2C ổn định. Khả năng di chuyển thời gian thực được điều khiển thông qua giao thức RC CRSF (ExpressLRS) với độ trễ cực thấp. Bố cục điều khiển được tối ưu hóa để bạn lái một cách mượt mà nhất: cần phải điều khiển di chuyển tiến/lùi và xoay thân (Roll), trong khi cần trái điều khiển đi ngang (Yaw) và chỉnh độ cao cơ thể.
Mình đã dùng tay điều khiển RadioMaster Boxer, nhưng bạn có thể dùng bất kỳ loại tay phát 2.4GHz nào khác đều được.
Để loại bỏ các cú sốc dòng điện và sụt áp khi 18 servo cùng hoạt động, hệ thống điện sử dụng thiết kế nguồn kép. Một bộ hạ áp XL4016 công suất cao (8A) cấp nguồn cho ESP32 và dàn servo bên trái, trong khi bộ hạ áp 5A thứ hai dành riêng cho dàn servo bên phải. Firmware tùy chỉnh đi kèm với 3 kiểu dáng đi tối ưu (Tripod nhanh nhẹn, Wave kiểu côn trùng, và Ripple cực kỳ ổn định với 5 chân luôn chạm đất), cùng với công tắc an toàn ARM/DISARM và chức năng tự cân bằng tức thì.
Linh kiện cần thiết:
- MPU6050
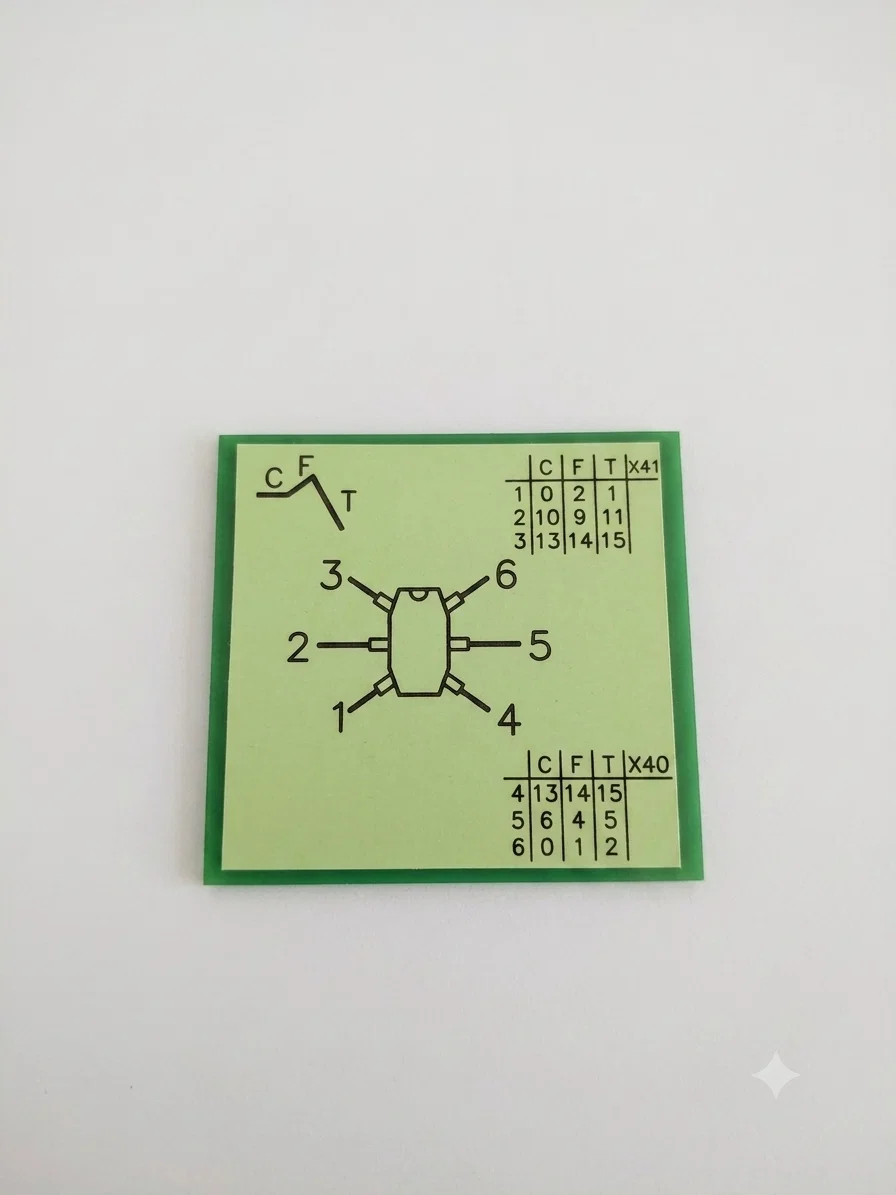
- 2x PCA9685
- ESP32 DevKit
- 18x vòng bi 623zz
- Bộ thu ELRS 2.4GHz (chỉ cần nếu bạn dùng tay phát ELRS)
- 2x bộ hạ áp 5A
- 18x servo mg90s
- https://www.aliexpress.com/item/1005007830491580.html?spm=a2g0o.order_list.order_list_main.50.531a1802FFnylY Bộ ốc và tán nhiệt M2.5 (rất khuyên dùng loại này)
- Công tắc bập bênh 12V
- 2x pin 18650
- Dây DuPont, đầu nối xt60, keo dán....
Giấy phép

File mô hình
















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!