Khung Quad 10 inch Gọn nhẹ và Dạng Module

Đây là mẫu khung quad 10 inch hoàn hảo để thử nghiệm ý tưởng. Thiết kế cực kỳ nhỏ gọn, có thể tháo rời tay đòn để dễ dàng bỏ vào túi đựng LiPo mà không cần dụng cụ, rất thuận tiện cho việc di chuyển và thay thế linh kiện.













Mô tả
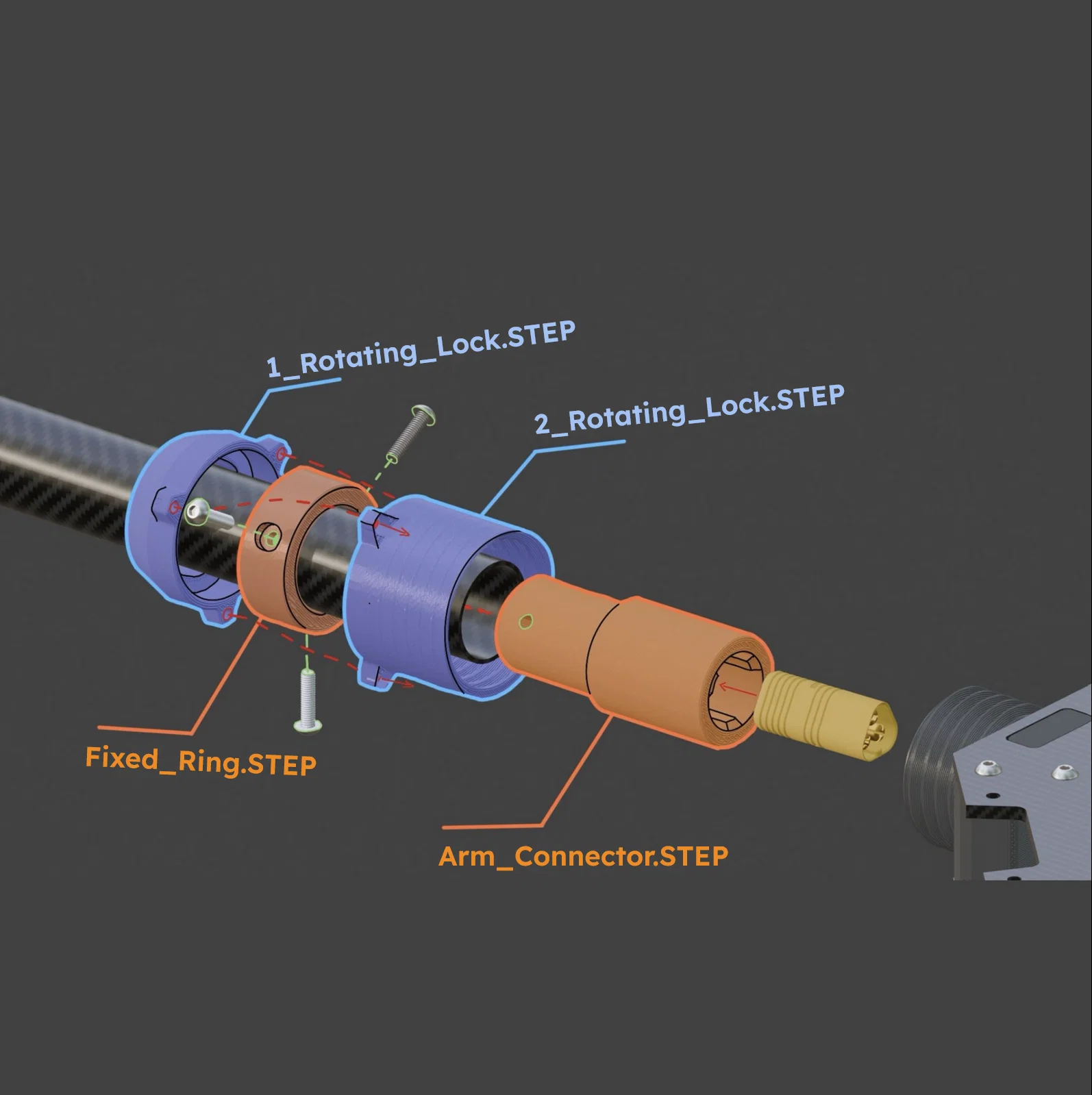
Khung quad này được thiết kế với tay đòn có thể tháo rời, giúp việc vận chuyển cực kỳ dễ dàng và chỉ mất chưa đầy 60 giây để lắp ráp mà không cần bất kỳ công cụ nào!
Bạn thậm chí có thể tận dụng tính năng này để thay đổi linh kiện nhanh chóng, chẳng hạn như sử dụng nhiều phần thân trung tâm khác nhau cho từng nhu cầu hoặc tải trọng riêng biệt, trong khi vẫn dùng chung một bộ motor. Hoặc bạn có thể giữ nguyên phần thân và thay bộ tay đòn khác để gắn motor/cánh quạt lớn hơn tùy theo nhu cầu nâng tải của mình!
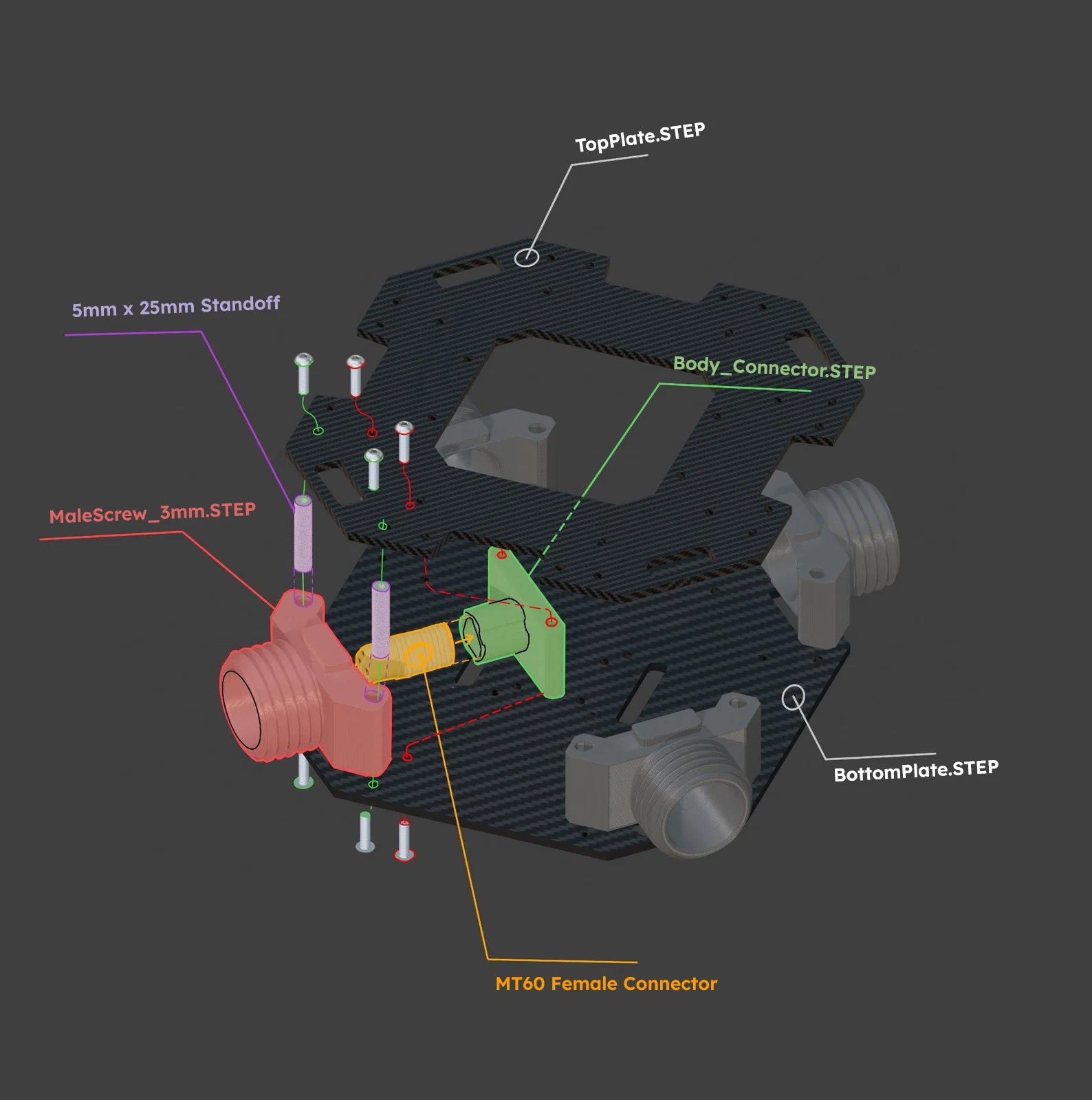
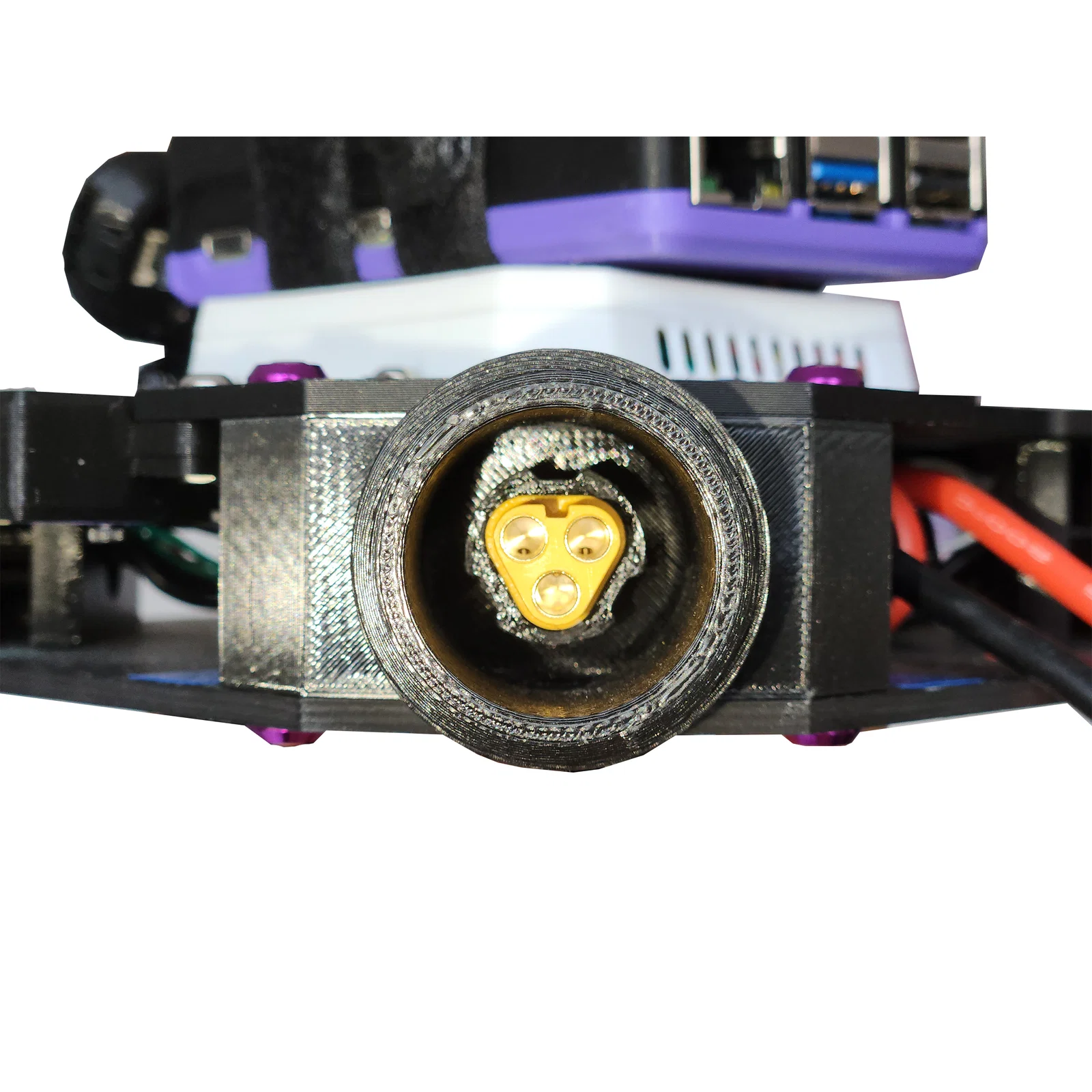
ESC được đặt bên trong phần thân, kết hợp cùng 4 đầu nối MT60 giúp kết nối tay đòn và motor một cách liền mạch.
— TỔNG QUAN —
Tại sao lại có dự án này? : Tôi tạo ra khung này vì không tìm thấy mẫu nào trên thị trường đáp ứng đúng nhu cầu mà vẫn dễ dàng mang theo khi di chuyển. Thiết kế này tạo ra nhiều không gian để gắn thêm phụ kiện, trong khi lại gọn nhẹ và dễ mang vác hơn cả một chiếc quad 7" long-range (thật đấy).
Ví dụ ứng dụng : Cá nhân tôi đã lắp thêm Raspberry Pi để thử nghiệm kết nối điều khiển 5G, nhưng bạn có thể dùng nó cho bất cứ mục đích nào mình muốn.
Kỳ vọng : Dù tôi rất tự hào về thiết kế này, nhưng nó vẫn đang là bản prototype. Bạn hoàn toàn có thể tối ưu thêm về trọng lượng. Tôi đã dùng tấm sợi carbon 3mm và thấy nó hơi quá mức cần thiết, tôi đề xuất dùng loại 2mm nhưng phần này chưa được kiểm chứng. Tôi cũng chưa có nhiều thời gian để test chuyên sâu, nhưng các kết nối vẫn hoạt động ổn định, tay đòn luôn giữ được độ thẳng và không bị biến dạng khi chịu lực. Với một thiết kế dạng module, nó thực sự rất bền bỉ.
Chi phí : Khung này tốn khoảng ~130$ để chế tạo với CNCDrone91 (tại Pháp).
Thiết lập của tôi : Đây không phải là khuyến nghị, nhưng tôi đã sử dụng:
Motor: Hobbywing 3115 900kv
ESC: 45A ESC
FC: Speedybee F405 wing
GPS: GPS_M10Q-5883
RX: ELRS 2.4Ghz
Pin: 6S ~4500 mAh
Phụ kiện: Raspberry Pi 5 -- 5v BEC -- Runcam Thumb Pro
— Phần cứng khung —
Screws: Qty - Length - M
(56 - 12 - 3) (12 - 8 - 3) (8 - 5 - 3) (16 - 4 - 3) (12 - 8 - 2)
- Danh sách ốc vít này chỉ là tạm thời.
Carbon: Part - Spec Top Plate - 3mm Thick Bottom Plate - 3mm Thick
Ống (Tube) x4: Length: 200mm Out Diameter: 22mm Diameter: 20mm
**
- Độ dày 3mm cho tấm trên/dưới là hơi dư thừa**. Tôi khuyên bạn nên dùng loại mỏng hơn để tiết kiệm chi phí và trọng lượng. Những thay đổi cho các linh kiện in STEP là không đáng kể, bạn có thể nhắn tin cho tôi để điều chỉnh hoặc tự sửa đổi tùy ý.
Nguồn ống carbon của tôi: https://www.easycomposites.eu/22mm-woven-finish-carbon-fibre-tube
-> Đầu nối Bạn sẽ cần 4 bộ đầu nối MT60. Ví dụ trên Amazon: https://a.co/d/0gP13EQi

Những đầu nối này sẽ được dán vào phần nhựa in, bạn có thể sử dụng bất kỳ loại keo CA nào cho việc này.
– Hình ảnh minh họa –


Giấy phép
File mô hình



















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!