Mô hình robot Ninja Otto sử dụng Nano V3 và Shield

Cho phép bạn xây dựng Otto Ninja bằng cách sử dụng khiên Nano V3 Plus ban đầu.


















Mô tả
Là một robot đi bộ và có bánh xe, Ninja trông thật thú vị để xây dựng. Tuy nhiên, thật khó để có được mạch Nano PCB nhỏ hơn, bên cạnh đó nó cũng khá đắt so với Nano V3 và Shield. (Tôi vẫn chưa thử nghiệm với các bo mạch ESP) Nhiều người xây dựng có thể có một số hệ thống Nano cũ và vì vậy phiên bản remix này cho phép tạo ra mô hình khởi đầu Ninja bằng cách sử dụng a) bo mạch nguồn 16340 và b) NanoV3 cùng Shield. Tôi đã hoàn thành một số lập trình cơ bản để hiển thị chuyển động của Ninja: https://youtube.com/shorts/zjgVOHkwsz4
Một chút triết lý: Thường thì chúng ta xây dựng những dự án này và chỉ chèn mã mà người khác viết và hy vọng dự án hoạt động. Đây không phải là bản chất của các dự án điều khiển bằng máy tính. Phần mềm quan trọng không kém, nếu không muốn nói là quan trọng hơn phần cứng. Tôi đã bao gồm một tệp zip chứa mã của tôi để làm cho Ninja đi bộ và lăn. Tôi khuyến khích tất cả những người xây dựng thực sự tiêu hóa giải thích hướng dẫn (trong PDF kèm theo tệp zip) để điều chỉnh hằng số cho các servo của riêng họ và cuối cùng thêm các chuyển động của riêng mình. Ninja phức tạp hơn nhiều so với Otto cơ bản và nếu bạn thấy điều này quá sức, hãy bắt đầu với mô hình đó.
Tôi đã bao gồm một PDF hiển thị tất cả các bộ phận tôi đã đặt hàng từ AliExpress.
Cập nhật #3: Ngày 16 tháng 8, '23: Đã thêm mã và giải thích chi tiết để hiệu chỉnh và làm cho Ninja thực hiện các chuyển động cơ bản.
Cập nhật #2: Ngày 21 tháng 7, '23: Đã remix đôi chân để thêm một vòng O thứ 2 để giữ khi đi bộ.
Cập nhật #1: Ngày 19 tháng 7, '23: Ninja hoàn chỉnh đã được xây dựng với Nano v3 & shield và bo mạch nguồn 16340.
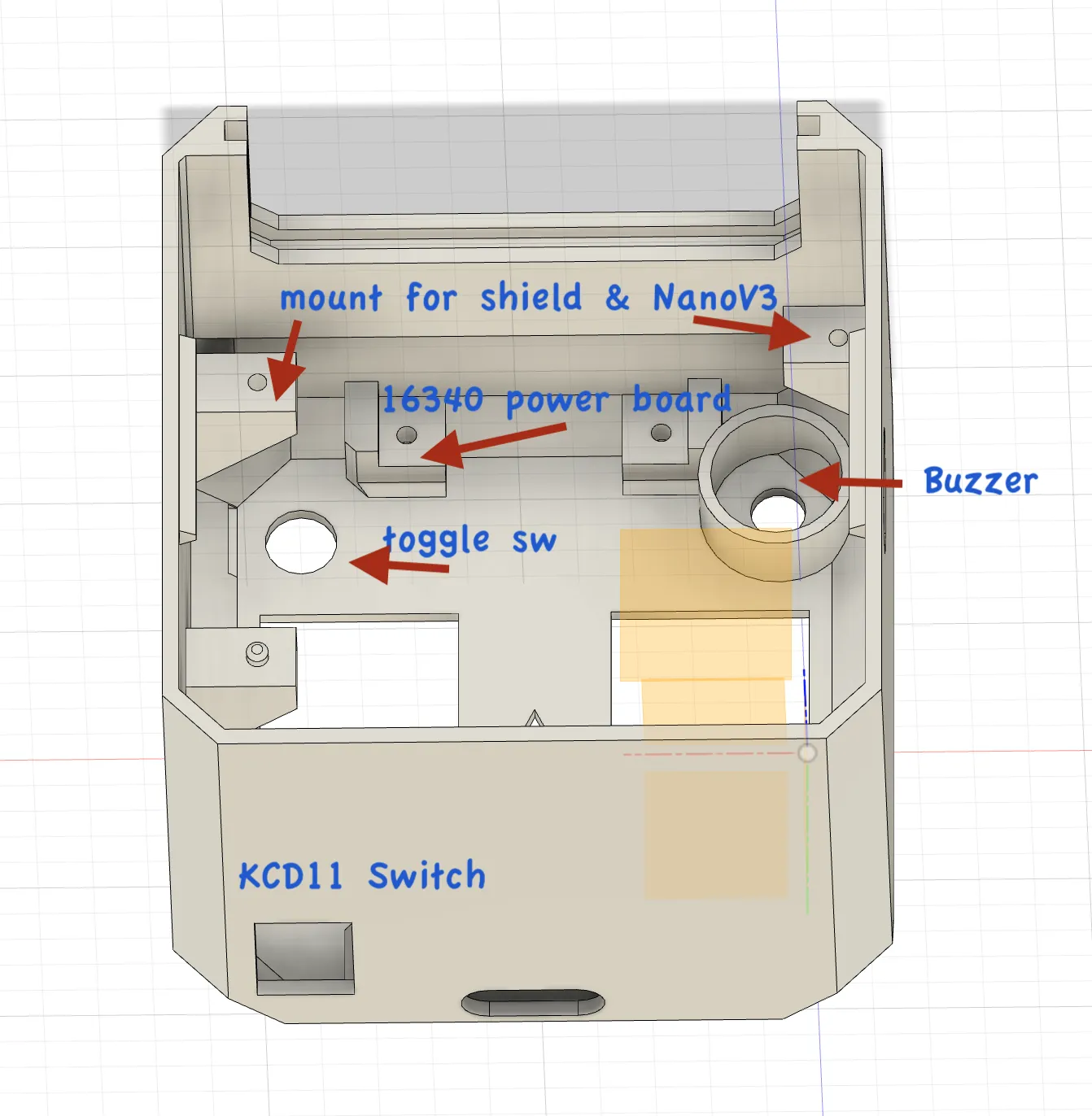
Thân: Thân cao hơn 6mm. Thật không thể để vừa tất cả vào kích thước ban đầu. Tuy nhiên, điều này không nên ảnh hưởng đến việc kết nối với các bộ phận khác hoặc hoạt động. (Cân bằng có thể thay đổi một chút vì tất cả các bộ phận bên trong khác nhau). Bảng nguồn 16340 và tấm chắn trên có thể được vặn chặt bằng vít M2 dài 4-6mm. Tôi chỉ sử dụng một vít để cố định mỗi bảng. Bạn có thể sử dụng công tắc bật KCD11 (10x15mm) cho nguồn hoặc một công tắc chuyển đổi. Thân có một hình trụ để giữ chuông báo.
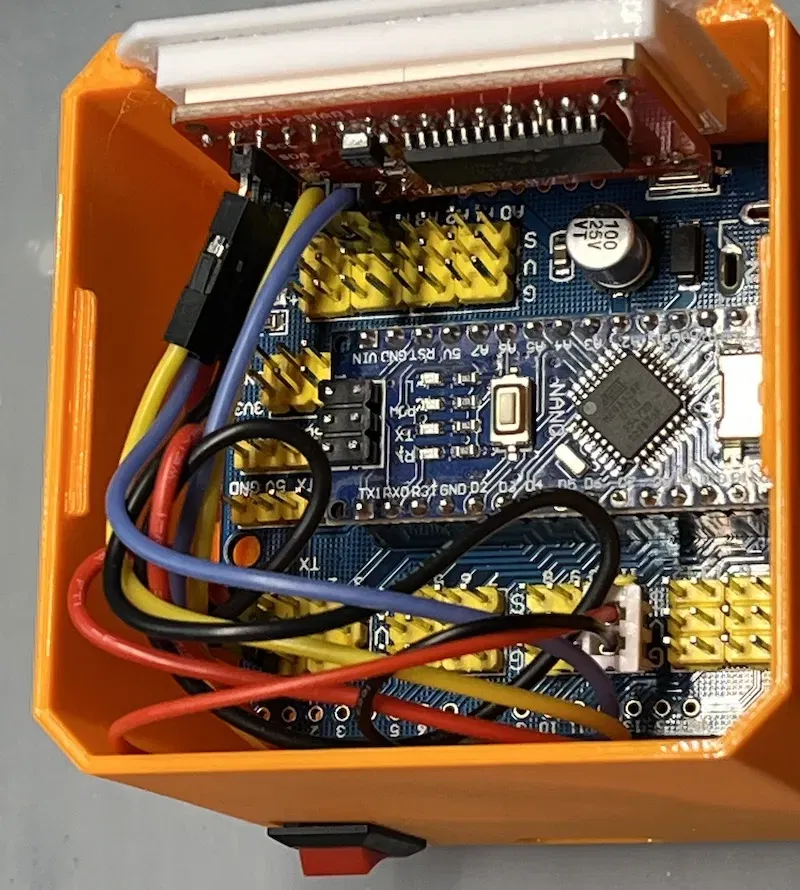
Mô-đun Tấm Chắn: Tôi đã sửa đổi tấm chắn nano của mình và loại bỏ “Japan Jack”. Nó không nên được sử dụng vì bạn có thể làm hỏng bộ điều chỉnh tuyến tính trên Nano V3. Tôi chỉ đơn giản sử dụng kềm cắt bên để phá vỡ vỏ nhựa, sau đó làm nóng mặt dưới của bảng 3 kết nối và kéo từ phía trên để loại bỏ từng chân. Bạn cũng có thể cắt các chân ở phía trên để tách chúng trước khi cố gắng loại bỏ. Điều này giúp việc lắp đặt bảng chắn dễ dàng hơn vì tôi không cần một lỗ lớn cho kết nối đó.
Chân: Tôi đã sử dụng CHÂN ĐƯỢC SỬA ĐỔI OTTO NINJA (Alex Just Alex). Những cái này vừa vặn hơn nhiều với các servo MG90s mà tôi đã mua.
Đế: Tôi đã sửa đổi mỗi đế để thêm một O-Ring ở dưới cùng để cung cấp độ bám khi Ninja quay khi đi bộ. Tất cả 4 O-ring có cùng kích thước và nên là: O-Ring Silicon VMQ với OD 62mm và CS:4mm. Kéo dài một cái để vừa với vòng ngoài. Một khi đã kéo dài, O-Ring không thể được sử dụng ở dưới cùng. Tôi đã mua một gói 10 cái với giá dưới 5 USD. Tôi thấy Silicon mềm hơn so với những cái cao su mà tôi đã tìm thấy. (In phần này với độ cao lớp 0.1mm).
Cảm biến Sonar: Do nhầm lẫn, tôi đã đặt hàng một vài cảm biến sonar SRF05 và vì vậy tôi đã bao gồm một tấm cho điều này. Bạn có thể sử dụng SRF05 giống như 04. Chỉ cần kết nối 4 chân như trên 04 và để chân thứ 5 không kết nối. Lưu ý rằng tấm này được thiết kế để vừa khít nhằm giữ cảm biến cố định. Bạn sẽ cần uốn các chân (nếu cần) sao cho chúng vuông góc với thân. Tôi đã sử dụng nhíp để đặt tất cả các chân vào tay cầm và uốn chúng cùng một lúc như trong bức ảnh kèm theo.
Buzzer: Tôi đã sử dụng một Buzzer chủ động. Các đầu nối Dupont dài một cách khủng khiếp và sẽ không vừa vào không gian nhỏ được phân bổ cho buzzer ở dưới đáy thân. Tôi đã cắt bỏ đầu của 2 dây Dupont và hàn các đầu dây trần vào các chân của Buzzer rồi uốn chúng một chút để cho phép chèn vào giá đỡ hình trụ của thân. Tôi đã sử dụng ống co nhiệt trên các mối hàn, nhưng điều này không cần thiết. Bạn có thể thấy buzzer và đầu nối của tôi trong các bức ảnh ở trên.
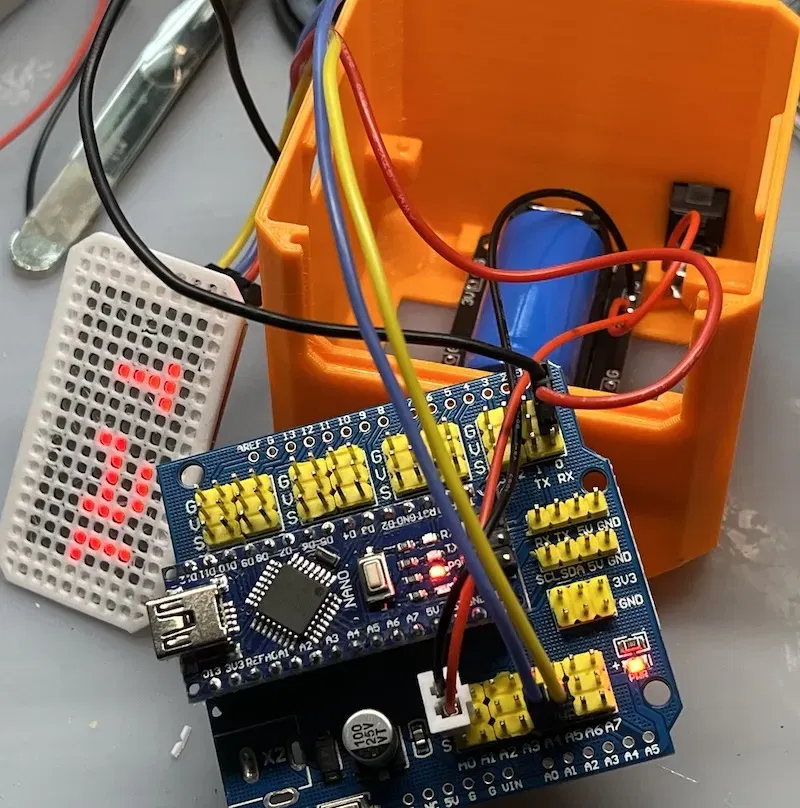
Ma trận LED: Tôi đã sử dụng ma trận LED I2C 16x8 Open-Smart (AliExpress). Tôi đã điều chỉnh một chút giá đỡ gốc để nó giữ chặt module này. Khi sử dụng module I2C này, hãy kết nối SDA với A4 và SCL với A5. Sau đó, sử dụng mã blockly cho “Chân mắt I2C” để xác định kết nối phần cứng. Sau đó, chỉ cần sử dụng Blocks để chỉnh sửa hiển thị. (Tôi đã đặt độ sáng hiển thị về 0 để tiết kiệm pin).
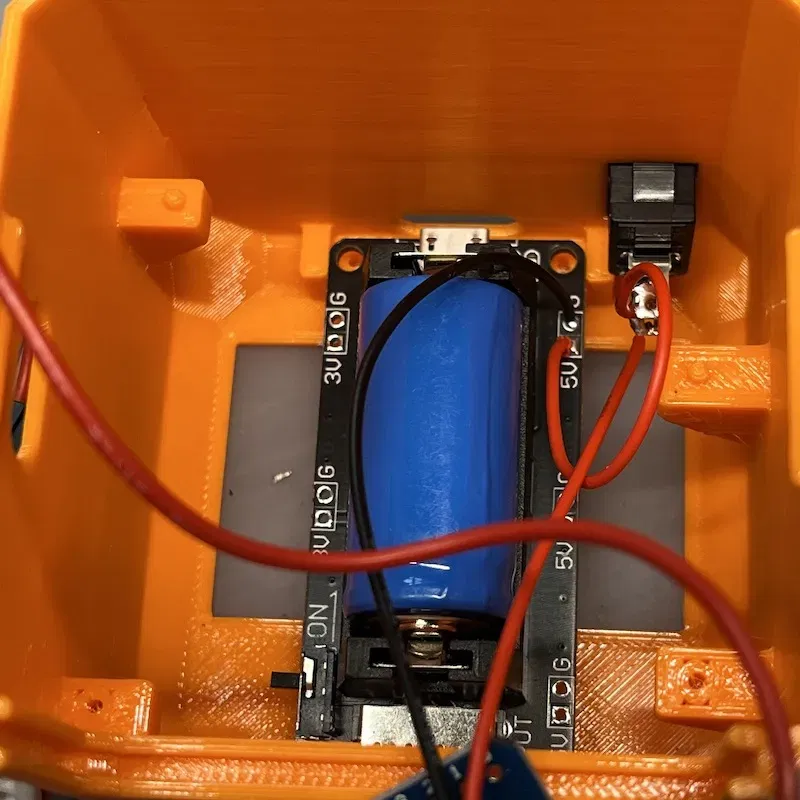
Nguồn điện pin: Ninja gốc sử dụng một pin 9v được cấu thành từ một cell 3.7 (nhỏ) duy nhất được tăng áp lên 9v và sau đó phải được giảm xuống 5v bằng cách sử dụng bộ điều chỉnh trên NanoV3 hoặc một bộ điều chỉnh bên ngoài nhỏ. Nếu bạn cấp 9v cho chân Vin và sử dụng bộ điều chỉnh NanoV3, là một bộ điều chỉnh tuyến tính, có thể, nếu một servo bị kẹt, rút hơn 1A từ bộ điều chỉnh (nếu pin 9v của bạn có thể cung cấp nhiều như vậy), điều này có thể làm hỏng bộ điều chỉnh Nano (bạn đang rút 5W từ một bộ điều chỉnh không có tản nhiệt, được thiết kế cho khoảng 1W). Tôi đã thiết kế đầu này để sử dụng bảng nguồn 16340 mà tăng áp một cell Li 3.7 duy nhất lên 5v và cấp trực tiếp vào +5v và Gnd. (Tôi cảm thấy điều này sẽ có dung lượng lớn hơn pin lithium 9v). Tôi đã sử dụng một đầu nối JST XH 2 chân với 2 dây gắn liền và hàn các dây vào bảng nguồn và sau đó sử dụng đầu nối để gắn vào bất kỳ chân +5v và Gnd nào thuận tiện. Bảng này có sẵn từ một số nguồn trên AliExpress và DIYMORE.CC. (cửa hàng chính thức diymore trên AliEx.). Tìm kiếm "mô-đun pin lithium 16340". Cố gắng tìm một pin 16340 chất lượng tốt (loại nút).
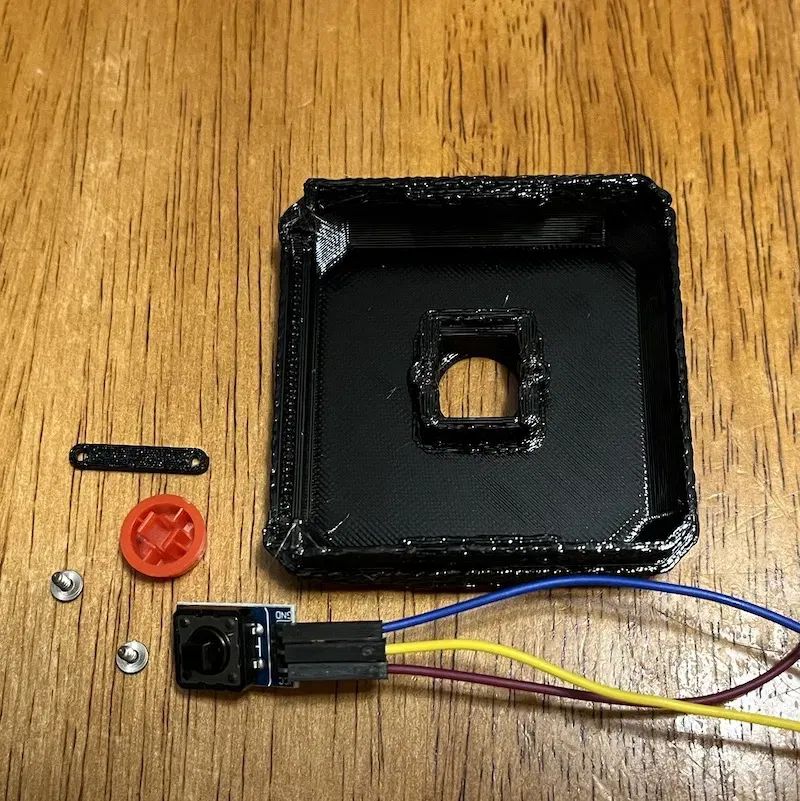
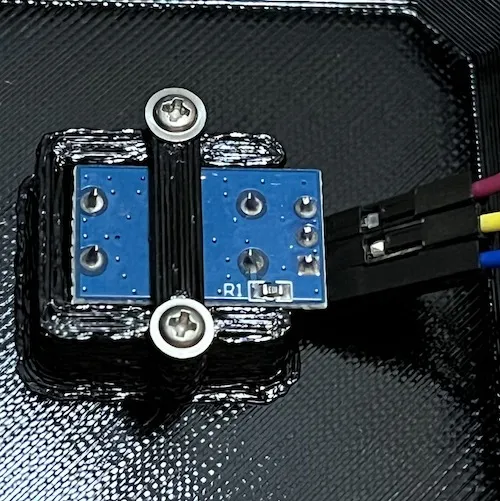
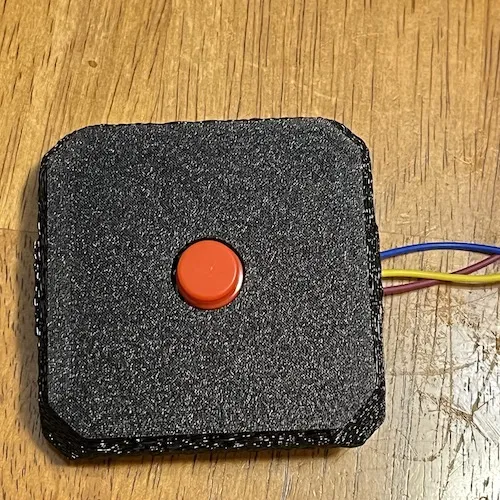
Nắp đầu và nút: Các nút có sẵn từ AliExpress không vừa với nắp đầu hiện có. Tôi đã remix nắp để chấp nhận các nút mà bạn sẽ thấy trong danh sách các bộ phận. Tôi cũng đã cố định PCB nút bằng 2 vít M2. Bạn có thể sử dụng một vít máy M2 hoặc các vít lớn đi kèm với các servo.
Hướng dẫn in: Tôi đã sử dụng chiều cao lớp 0.3 cho hầu hết mọi thứ. Tôi đã sử dụng 0.2 cho giá đỡ chân. Đối với bàn chân, tôi đã sử dụng chiều cao lớp 0.1mm vì chi tiết giữ vòng O ở dưới cùng. Tôi đã sử dụng 3-4 đường viền để các bức tường chắc chắn. Tôi đã sử dụng PETG cho giá đỡ chân & bàn chân. Điều này cho phép chân gắn vào thân một cách đáng tin cậy hơn và bàn chân có thể giữ vòng O ở dưới cùng. (PETG mềm dẻo hơn PLA). Nhưng bạn có thể in mọi thứ bằng PLA. Không cần hỗ trợ cho bất kỳ bộ phận nào ở đây. Thân và nắp được in với tùy chọn "da mờ" trong eSlicer để che giấu các đường lớp, và hiện tượng ma từ các hỗ trợ tường bên trong xảy ra vì các bức tường chỉ dày 1.5mm. Điều này đã thành công rất tốt.
Các tệp bước được bao gồm trong tệp ZIP đính kèm.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!