Another Tiger Tank (RC rev) – Xe tăng Tiger RC (WiFi) bản cập nhật

Bản cập nhật Another Tiger Tank (RC rev) để điều khiển RC qua WiFi: lái xe, xoay tháp pháo và nâng/hạ nòng. Có thay đổi ngàm motor/servo, hệ treo chắc hơn, xích & sprocket tối ưu khoảng hở. Kèm danh sách part, hướng dẫn in và lắp ráp.














Mô tả
để thêm điều khiển cho tháp pháo, nâng/hạ nòng và di chuyển.
Các thay đổi gồm có các ngàm/giá lắp cho motor, servo và điện tử. Chỉnh lại hệ treo cho đơn giản mà chắc hơn, và tăng nhẹ khoảng cách bánh xe. Gia cố bánh dẫn hướng (idler) và bánh chủ động (sprocket), làm mỏng xích và tăng gờ dẫn hướng để có đủ khoảng hở cần thiết. Thêm vài chỉnh sửa nhỏ về ngoại hình... nhưng tổng thể nhìn vẫn giống. Phần khó nhất là làm sao để xích và sprocket ăn khớp sạch, ổn định và tin cậy.
Nhìn chung, mẫu này cũng “đúng chất” Tiger nguyên bản ở chỗ: motor 12V lực xoắn rất mạnh, nên nếu kéo FULL power làm mấy pha bẻ lái gắt trên bề mặt gồ ghề thì có thể tự phá hủy cụm truyền động. Nó có thể bẻ gãy trục và/hoặc làm bung các ngàm motor dán keo bên trong thân xe. (đừng hỏi sao mình biết)
Chạy trên bề mặt trơn hơn, nơi nó không bị kẹt/hang, thì không sao. Tháp pháo quay không bị giới hạn, tuy nhiên servo nâng/hạ nòng có đi dây, nên tùy kỹ năng đi dây của bạn (mình thì kém), nó có thể làm đứt/chết kết nối đó.
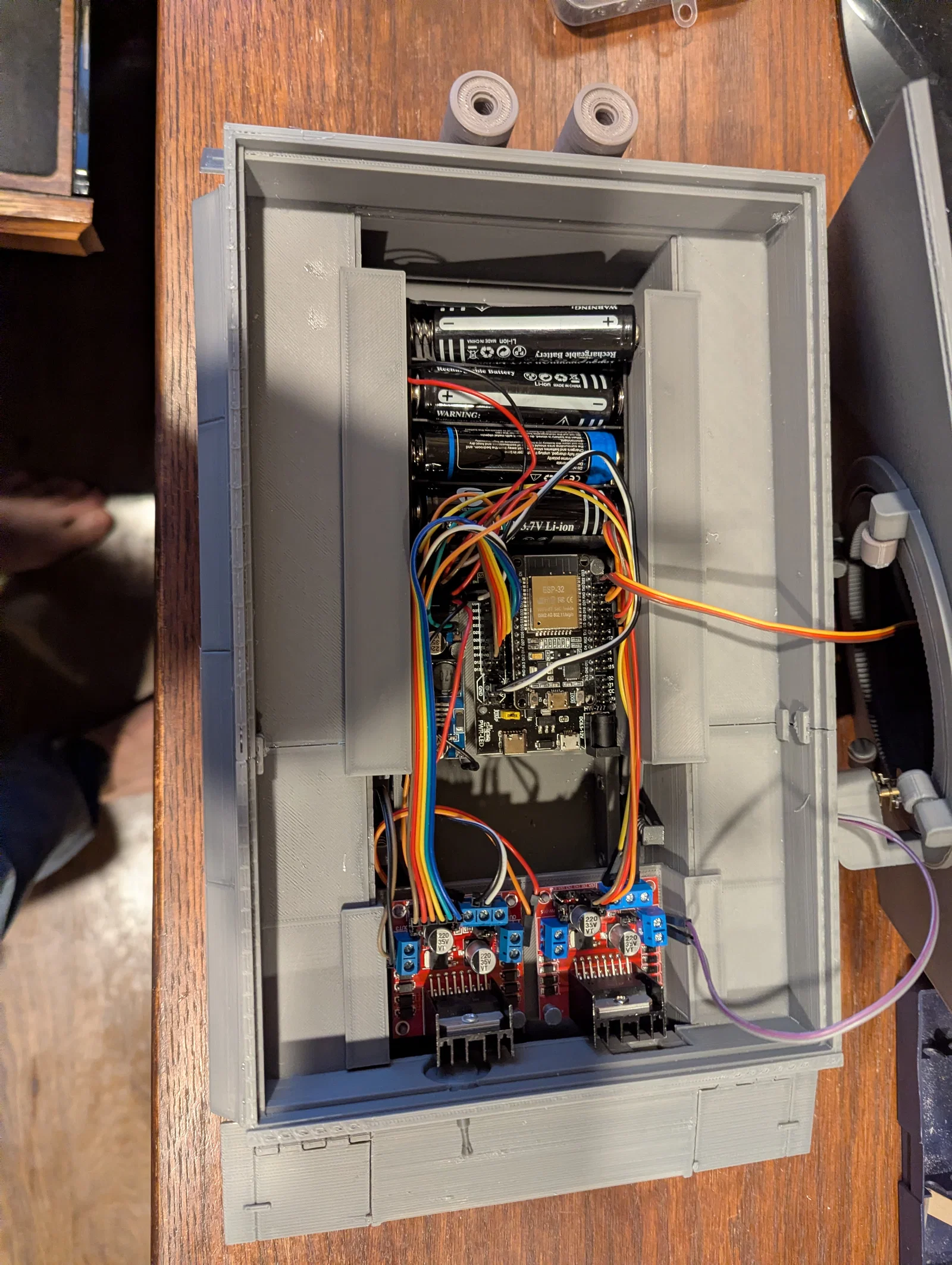
Điện tử dùng: ESP32 30pin và board mở rộng, 2 bộ điều khiển motor L298, 1 bộ giảm áp LM2596, 2 motor giảm tốc 12V 20mm 100 rpm, 1 motor N20, 1 servo SG90, và hộp pin cho 4 viên 18650. Bạn có thể dùng khay pin AA 8 viên và về lý thuyết có thể bỏ bộ giảm áp bằng cách lấy 5V từ motor controller, vì khi đó chỉ dưới 12V thay vì 14.8V từ pin 18650.
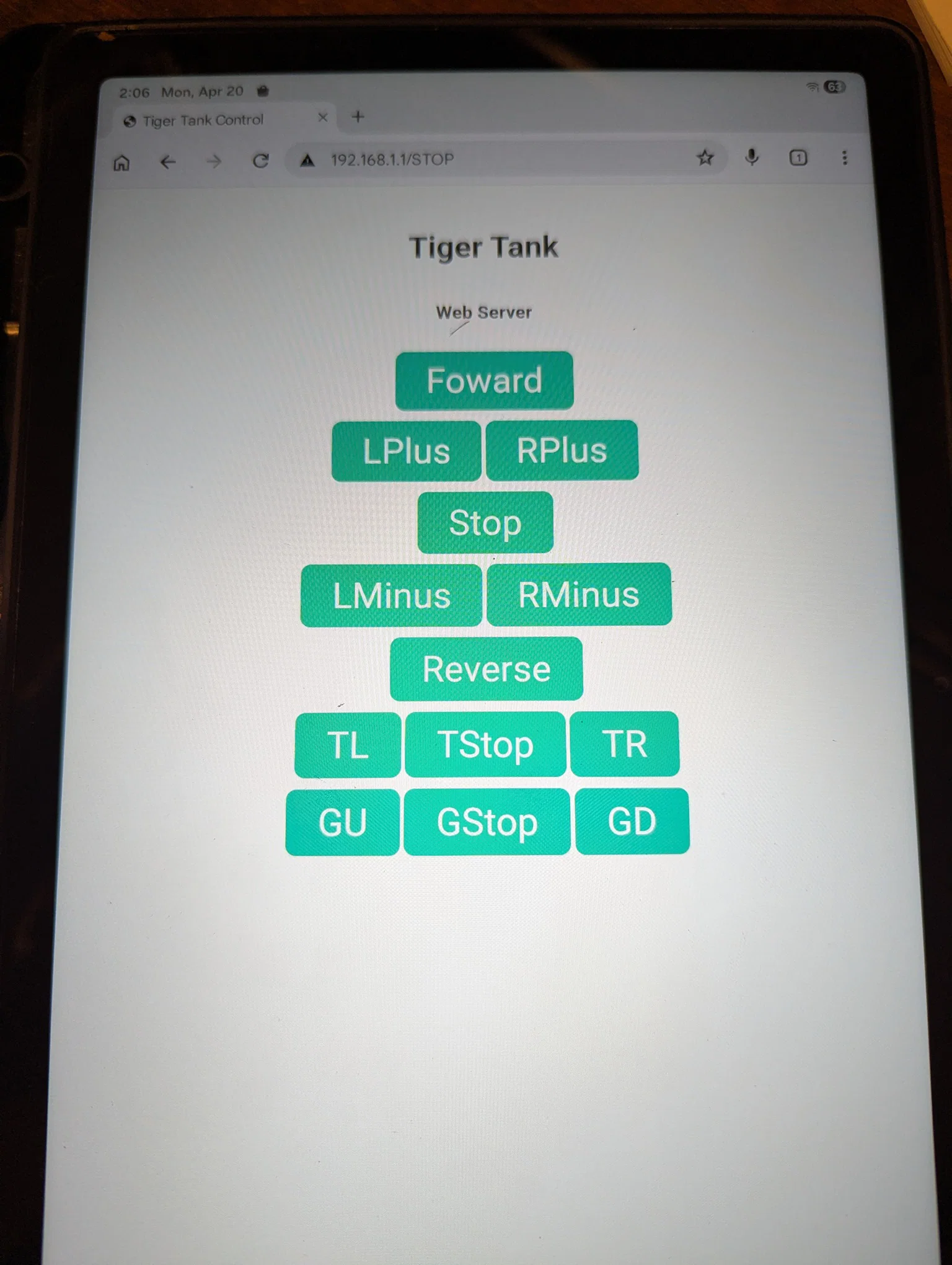
Điều khiển được cung cấp qua webserver chạy trên ESP32 trong xe tăng. Xe sẽ phát một mạng wifi để bạn kết nối, sau đó bạn truy cập IP 192.168.1.1 (hoặc địa chỉ bạn set trong chương trình) để mở trang web với các nút điều khiển xe.
Đây là model khá lớn, khoảng 350 chi tiết cần in và sẽ tốn hơn 1kg nhựa. Khi gắn pin, motor và điện tử vào thì nặng hơn vài pound.
Parts inventory
Front Hull Bottom
1
Front Hull Top
1
Rear Hull Bottom
1
Rear Hull Top
1
Front Deck
1
Rear Deck
1
Axle R
8
Axle L
8
Axle Stop
16
Axle Stop Top
16
Front Axle
2
Rear Axle
1
Axle Plug
24
Road Wheel
48
Road Wheel Tire
48
Spacer 1
50
Spacer 8
20
Spacer 12
20
Spacer6plus
4
Sprocket
4
Sprocket Spacer
2
Idler Wheel
4
Idler Wheel Spacer
2
Drive Guard
2
Side Fender 1
2
Side Fender 2
2
Front Fender R
1
Front Fender L
1
Rear Fender R
1
Rear Fender L
1
Exhaust
2
Driver Port 1
1
Driver Port 2
1
MG1
1
MG2
1
Deck Hatch
2
Hatch Scope
2
Grate 1
2
Grate 2
2
Turret
1
Mantlet
1
Mantlet Pin
2
Gun
1
Turret Hatch
1
Com Hatch
1
Com Hatch Lid
1
Turret Base
1
Turret Base Roller
1
Turret Pin
2
Turret Bin
1
Track 10 piece R
7
Track 10 piece L
7
Track Pins 10
1
ESP32 and expansion board
20mm geared 12v motors
2
N20 motor
1
SG90 servo
1
L298 Motor controller
2
LM2596 voltage regulator
1
battery box
1
Electronics ESP32
1
Electronics Motors
1
Electronics Cap
8
Chắc mình còn quên gì đó, nhưng sẽ cập nhật khi cần.
Mấy thông số này không phải tuyệt đối vì mình cũng không phải chuyên gia in, nhưng hy vọng vài gợi ý sẽ giúp bạn in dễ hơn. Mình in đa số ở layer 0.16mm và dùng support khi cần, bằng PLA+. Khi dùng support, mình set support overhang angle lên 75% để slicer không nhét support vào các lỗ 6mm (vừa khó vệ sinh vừa không cần). Với setting này nó sẽ ưu tiên đặt support đúng chỗ thật sự cần.
Hầu hết chi tiết chỉ cần support “touching build plate”, nhưng phần turret và front bottom hull chắc chắn cần full support. Dùng support roof layer với gap 0.3mm giúp bề mặt in sạch hơn và tháo support dễ hơn. In với tường dày hơn để tăng độ bền. Mặc định mình nghĩ là 0.8mm, mình tăng lên 1.2mm.
Assembly Hull
Mình không giỏi dán keo và ráp (hay lem nhem), nhưng thường ít keo sẽ tốt hơn. Luôn test fit tất cả để đảm bảo bản in không có bavia hay điểm gồ khiến chi tiết không khớp chuẩn. Tất cả các lỗ trên chi tiết khoảng 6mm và nên được rà bằng dũa tròn 1/4" để trục đã làm sạch có thể quay trơn.
-
Dán 2 phần bottom hull trước và sau.
-
Làm sạch các chi tiết driver port và đảm bảo cửa quan sát trượt OK. Dán driver port vào phần Front Top hull.
-
Dán phần top hull trước và sau lên Hull bottom. Mình thấy kẹp chỉnh được (adjustable clamps) rất hữu ích, đôi khi dùng dây thun để giữ chặt trong lúc keo epoxy 5 phút đông. Lưu ý driver Port phải lắp trước bước này vì lắp sau sẽ không luồn vào được.
-
Dán các top axle stop vào các rãnh dẫn hướng bên trong hull.
-
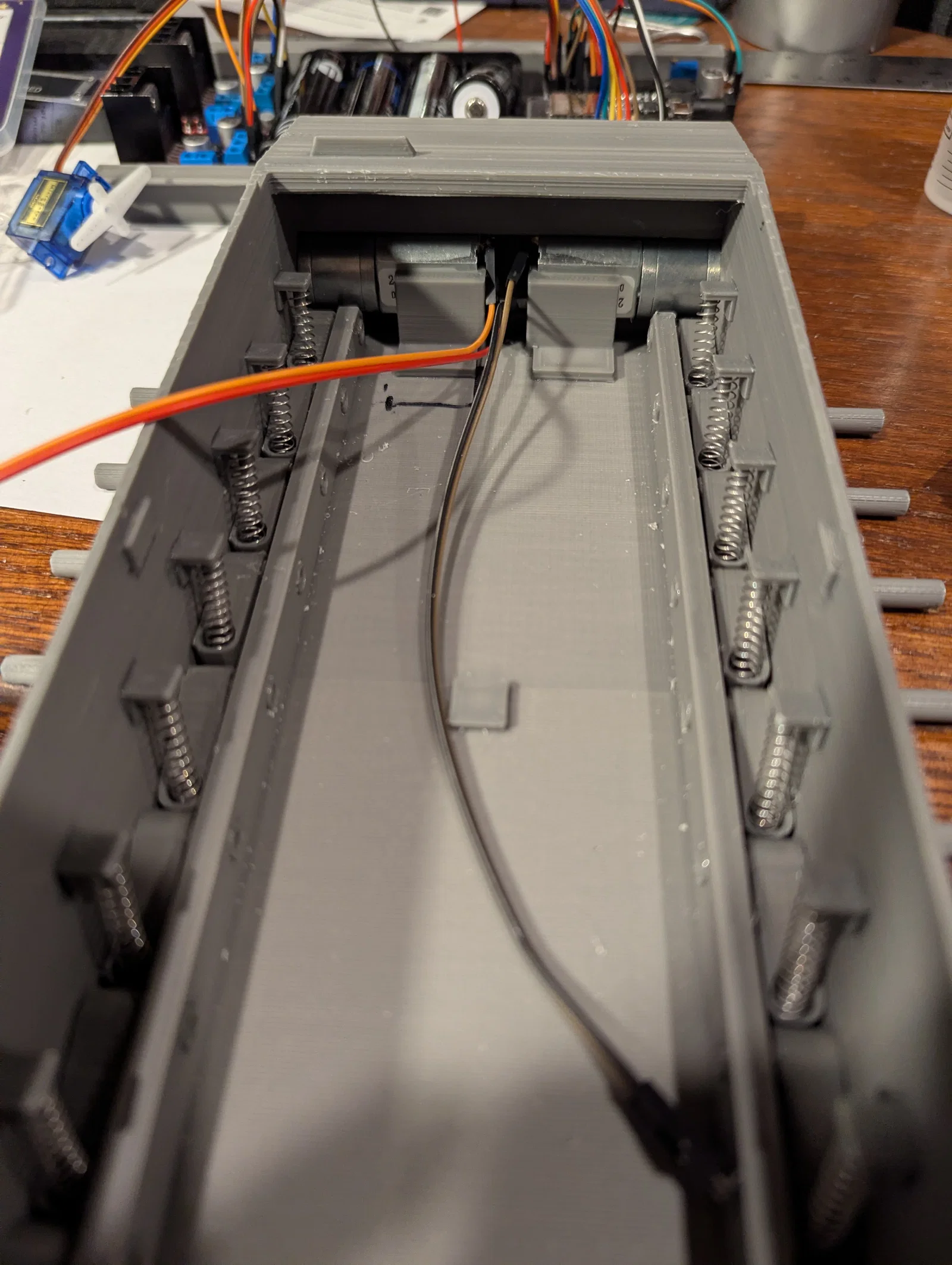
Lắp motor trái/phải và dán các motor mounts để giữ cố định. Nhớ hàn dây trước.
-
Làm 16 bộ bánh từ 48 road wheels bằng cách dán 3 road wheels lại với nhau cùng spacer 12mm. Mình in rear axle và dùng nó để canh đồng tâm khi keo khô, rồi dũa lại lỗ bằng dũa 1/4". Mỗi bộ bánh sẽ có: 2 bánh úp lưng vào nhau, 1 spacer 12mm, và bánh thứ ba với phần chi tiết quay ra ngoài. Nếu bạn in lốp bằng TPU thì chỉ cần căng vào là giữ được, không cần keo.
-
Khi bánh đã được làm sạch thì gắn lên trục theo kiểu xen kẽ cặp đôi hướng vào trong/ra ngoài. Với cặp hướng vào trong: bắt đầu bằng spacer 8mm, rồi bộ bánh, sau đó cố định bằng Axle plug và chấm keo nhẹ. Với cặp hướng ra ngoài: bắt đầu bằng spacer 1mm, rồi bộ bánh, rồi spacer 8mm, và cố định bằng axle plug + chấm keo. Xem hình để bố trí. Bộ bánh đầu tiên nên để cặp đôi theo hướng ra ngoài và cứ thế xen kẽ. Khi luồn trục vào hull, trục phải đi xuyên qua axle stop sao cho “spring pocket” nằm phía sau và hướng lên trên. Mình chấm keo nhẹ ở axle stop, nhưng có thể dễ hơn nếu dùng axle plug ở phía sau để giữ.
-
Bạn sẽ luồn được lò xo vào túi (pockets) và qua chốt của upper stop. Mình dùng lò xo 5mm x 25mm từ một bộ kit. Xem hình. Cách này hoạt động ổn khi xe đã gắn pin các kiểu. Mấy bộ lò xo nhỏ đủ loại thường dưới $10 trên mấy trang bán online.
-
Ráp drive sprockets: mỗi cái dùng 2 sprockets và 1 sprocket spacer, canh trên một trục dư rồi làm sạch sau khi keo set. Mình dùng một đoạn xích quấn quanh sprocket để canh răng của sprocket (quan trọng). Ráp idler wheels: mỗi cái dùng 2 bánh và 1 idler spacer, làm tương tự.
-
Luồn front axle qua drive guard và dán drive guards lên front hull, đồng thời luồn keyed axle vào trục motor. Chấm keo nhẹ bên trong axle để bám vào motor. Đặt một washer lên front axle rồi dán cụm sprocket lên front axle. Phải lách răng sprocket qua bộ bánh trước khá sát, nhưng vẫn làm được nếu ấn mạnh chút.
-
Luồn rear axle qua hull. Dán một cặp spacer6plus lên trục và dán vào hull, mỗi bên 2 cái. Cách này gia cường trục để giảm cong. Khi keo set, thêm washer 1mm, luồn idler wheel vào và khóa bằng axle plug.
-
Nối 70 miếng xích (một bên phải một bên trái) bằng Track Pins và chấm keo rất ít để giữ đầu chốt với xích. (7 đoạn loại 10 miếng). Lắp xích quanh bánh, sprocket và idler rồi chốt lại bằng track pin cuối. Chỉnh số mắt xích để hơi căng nhưng vẫn “rũ” như hình. Có thể bạn sẽ cần thêm vài mắt. Đầu track pin nên hướng ra ngoài, gờ dẫn hướng của xích phải nằm ngoài cặp bánh đôi và nằm trong bánh đơn phía ngoài. Sprocket phải ăn xích sạch.
-
Lắp side fenders. Bạn có thể in liền 1 mảnh nếu máy in đủ khổ. Dùng các gờ dẫn trên hông hull để canh đúng vị trí.
-
Lắp front/rear fenders và ống xả. Test fit cho thẳng hàng rồi dán. Nếu muốn front fenders có thể nhấc lên ở bản lề, bạn cần cắt phía dưới cái tab đang khóa nó với phần ngoài của fender.
-
Lắp MG ở thân. Dán vào upper hull, phần bi và súng sẽ bấm vào (snap in).
Assembly Turret and Deck
-
Ghép các mảnh deck phía trên. Deck có thể in liền 1 mảnh nếu máy in đủ khổ.
-
Luồn turret qua deck và dán Turret base vào. Cẩn thận chỉ bôi keo trên bề mặt cần dán.
-
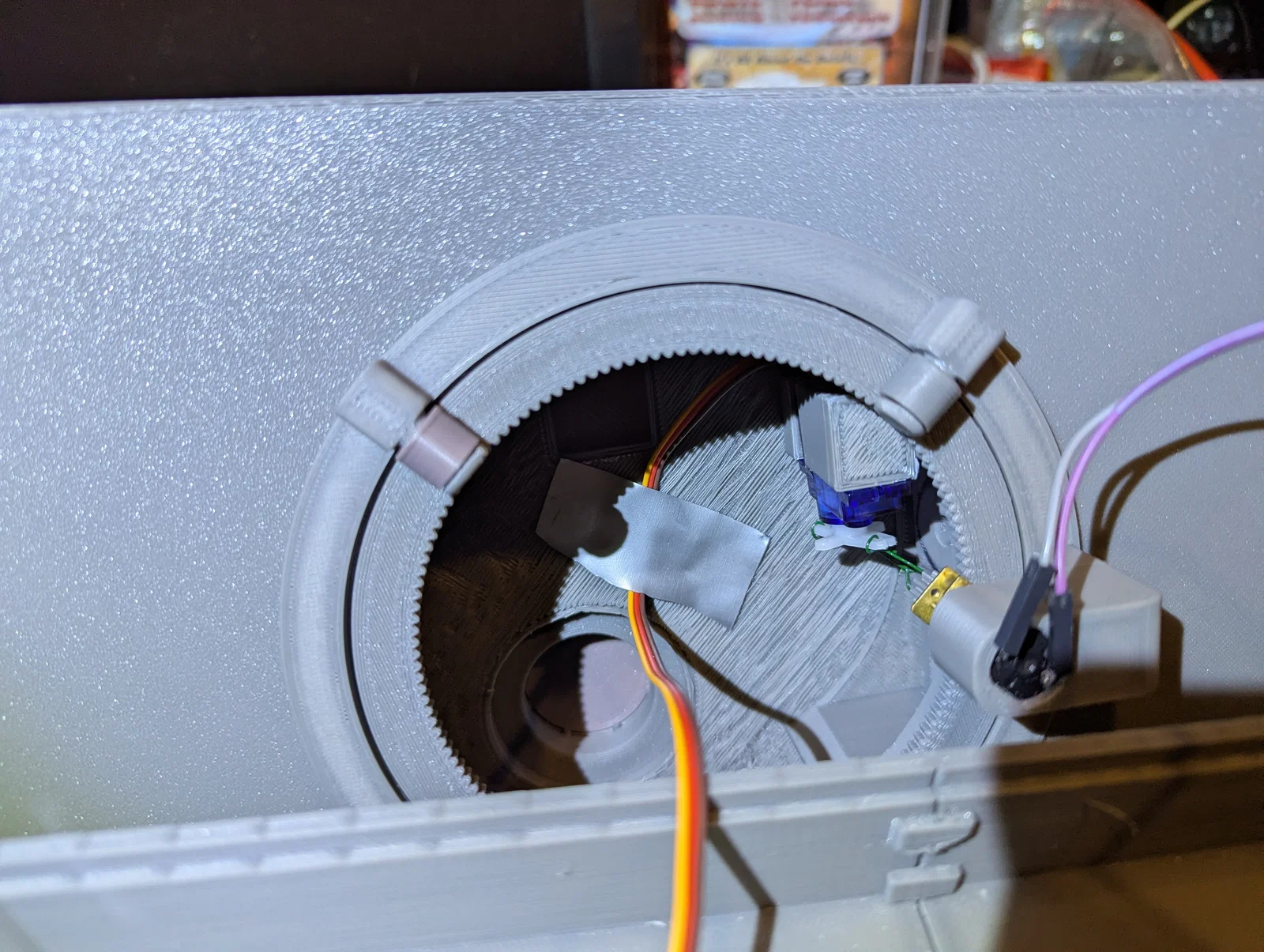
Gắn bánh răng N20 lên trục motor, đặt motor vào carrier trên turret base roller. Nhớ hàn dây trước.
-
Dán turret base roller vào mặt dưới của deck quanh Turret base. Đảm bảo bánh răng N20 ăn khít với răng của vòng Turret base ring trong lúc keo đang set. Khi chắc rồi, thêm spacer 8mm làm con lăn và khóa bằng axle plugs. Khi lật đứng lên, turret sẽ quay kiểu “lazy suzan” nhưng được khóa vị trí nhờ răng bánh răng ăn khớp.
-
Bắt một tay đòn (arm) lên trục SG90 (có sẵn theo servo). Dán SG90 vào carrier trong turret với trục ở vị trí cao. Dán mantlet tether vào mặt sau của mantlet, phía xa lỗ súng.
-
Cố định mantlet vào turret bằng turret pins và chấm keo nhẹ. Dùng dây luồn qua lỗ trên/dưới của mantlet tether và nối vào tay servo. Mình dùng dây làm vườn loại mảnh.
-
Bấm (snap) các hatch scopes vào hatches rồi dán Deck hatches vào. Dán cẩn thận để scopes vẫn quay được sau khi keo khô. Lắp grates vào back deck với chút keo.
-
Nòng chính (main gun) chỉ việc trượt vào mantlet.
-
Nối bản lề với Turret hatch bằng một đoạn filament. Dán bản lề lên turret.
-
Lắp Commander hatch và làm sạch Lid để đóng khít, rồi gắn bằng một đoạn filament.
-
Gắn Turret Bin phía sau turret giữa hai pistol ports.
-
Có thêm smoke canisters, nếu thích thì gắn lên turret.
Electronics
-
Gắn điện tử điều khiển lên các carrier boards. Cố định mỗi món bằng vài cái caps dán keo lên các chân. Dán một breadboard 25 pin lên carrier. Mình dùng nó để chia nguồn 5V và 12V, nếu bạn hàn trực tiếp hết thì có thể bỏ.
-
Đi dây... Mình dùng breadboard 25 pin để quản lý các đường power và ground.
esp32 connections
-
D32 nối vào L298N Driver ENA
-
D33 nối vào L298N Driver IN1
-
D25 nối vào L298N Driver IN2
-
D26 nối vào L298N Driver IN3
-
D27 nối vào L298N Driver IN4
-
D14 nối vào L298N Driver ENB
-
D22 nối vào L298N Driver ENA (driver thứ 2)
-
D19 nối vào L298N Driver IN4 (driver thứ 2)
-
D18 nối vào L298N Driver IN3 (driver thứ 2)
-
D23 nối vào ngõ SG90 pwm input, SG90 lấy 5V và ground từ rail của expansion board.
Jumper esp32 expansion board sang 5V cho power rail
jumper l298 để dùng external 5V vì input 14.8V quá cao cho bộ ổn áp nội
đấu output pin 14.8V vào ngõ vào voltage regulator và chỉnh vr output ra 5V
đưa 5V từ voltage regulator sang ESP32 expansion board và ngõ 5V vào của các L298
đưa 14.8V vào ngõ cấp motor của L298
nối tất cả ground về lại battery pack
đấu motor vào phía output của L298
-
Các carrier nên trượt vào theo hình và chừa chỗ cho motor N20 điều khiển tháp pháo.
-
Nạp chương trình qua cáp USB và IDE khi chưa lắp pin. Bạn có thể test chỉ với 5V từ USB. Mỗi motor có thể 50/50 sẽ bị đảo cực. Bạn có thể sửa bằng cách đảo dây ở controller, hoặc đổi điều khiển H-Bridge trong chương trình. Khi mọi thứ chạy OK thì lắp pin và chạy thôi... Tốc độ di chuyển có 4 mức và đổi bằng cách bấm lặp lại nút tương ứng. Tháp pháo và servo nòng có 1 tốc độ và được set trong chương trình.
Đã thêm ứng dụng Arduino mẫu cho chương trình điều khiển ESP32.
Nếu bạn làm tới đây rồi thì mình có thêm vài phụ kiện ở đây.
Giấy phép

File mô hình




























































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!