Cánh tay robot 5 trục in 3D điều khiển bằng găng tay

Dự án cánh tay robot 5 trục in 3D được điều khiển bởi Raspberry Pi và găng tay cảm biến thông qua kết nối WiFi. Cánh tay sử dụng 6 servo, tích hợp bo mạch tùy chỉnh và thuật toán Inverse Kinematics để mô phỏng chính xác cử động bàn tay.






Mô tả
Kế hoạch sơ bộ:
Một chiếc găng tay có khả năng theo dõi chuyển động của bàn tay, sau đó gửi dữ liệu qua WiFi đến Raspberry Pi. Raspberry Pi sẽ chạy chương trình hiển thị mô phỏng và truyền tải các chuyển động đó theo thời gian thực.
Thực hiện chi tiết:
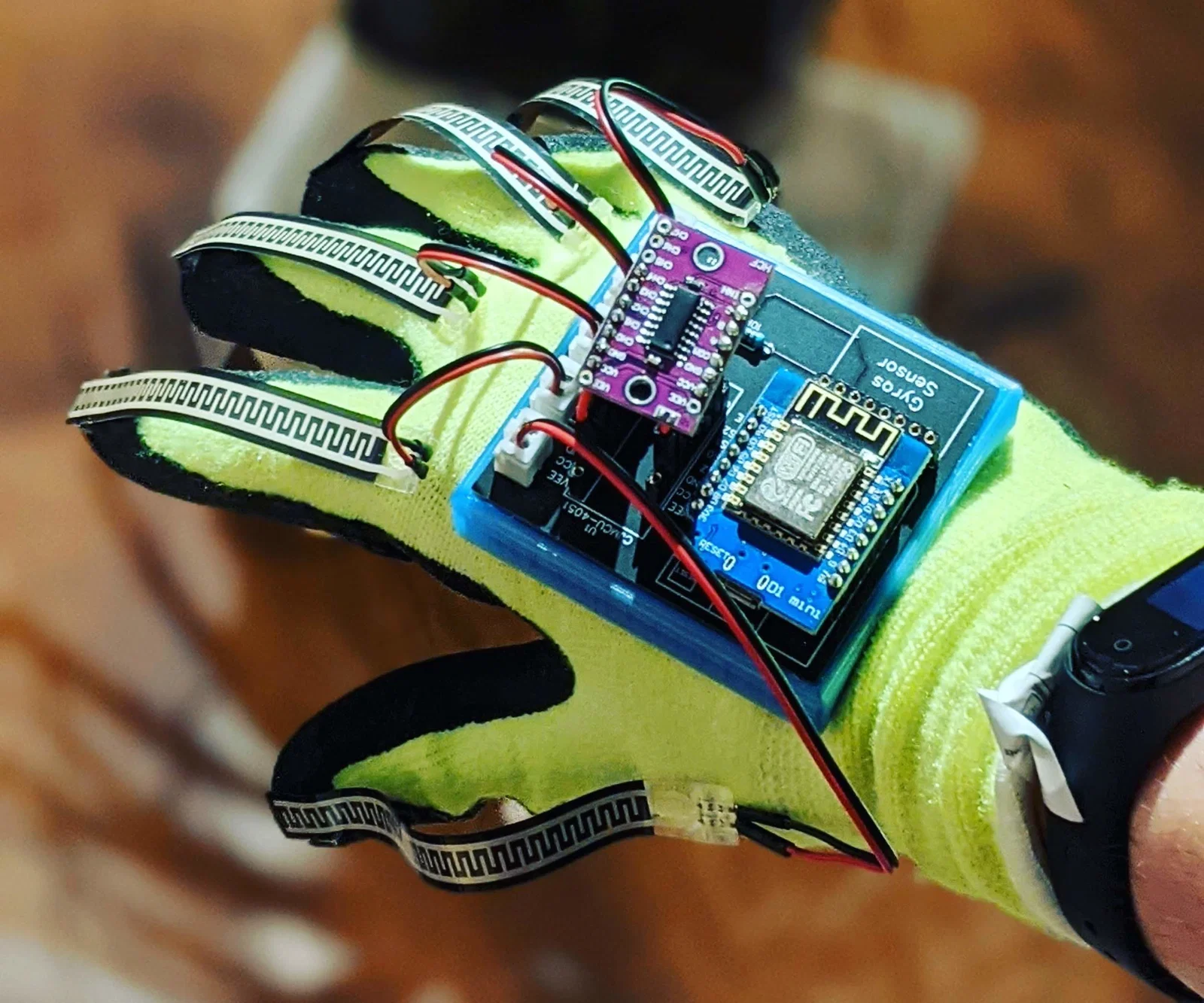
Ý tưởng của chúng mình là tạo ra một chiếc găng tay ghi lại các chuyển động riêng biệt của ngón tay, cũng như độ nghiêng (pitch) và độ xoay (roll) của bàn tay. Dữ liệu này được gửi đến Raspberry Pi/Laptop qua Wemos D1 Mini bằng kết nối WiFi (TCP). Wemos D1 Mini hoạt động ở chế độ AP (tự tạo mạng WiFi riêng) vì mạng của trường học không cho phép kết nối trực tiếp giữa Raspberry Pi và Wemos. Ưu điểm là bạn có thể dùng găng tay ở bất cứ đâu mà không phụ thuộc vào mạng cố định. Một tập lệnh Python sẽ xử lý dữ liệu để gửi tín hiệu điều khiển chính xác đến từng servo trên cánh tay. Dữ liệu từ cảm biến con quay hồi chuyển trên Wemos được chuyển đổi thành tọa độ vị trí, sau đó gửi tới script Python cùng với dữ liệu cử động ngón tay, rồi từ đó tính toán vị trí servo phù hợp.
Phân chia công việc:
Mình phát triển phần cứng và phần hiển thị trong Unity.
Bạn mình phát triển phần mềm cho cánh tay bằng Python, xử lý dữ liệu từ con quay hồi chuyển và các công việc liên quan đến kết nối giữa găng tay và PC.
Quá trình phát triển:
Ban đầu, chúng mình cân nhắc cách ghi lại chuyển động ngón tay. Giải pháp rẻ tiền là sử dụng cảm biến áp suất tự chế để tiết kiệm chi phí.

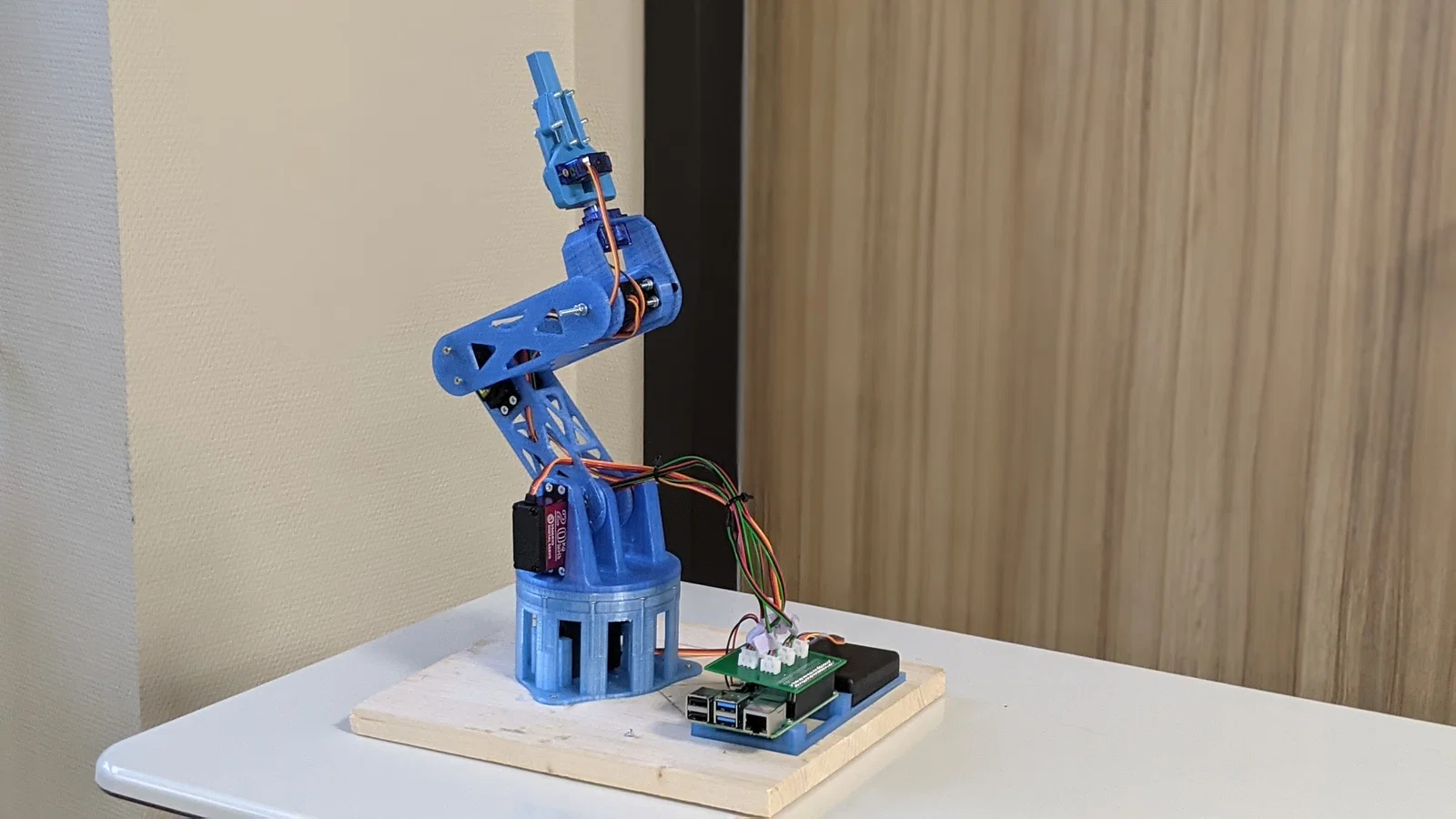
Tiếp theo là phần cánh tay. Chúng mình in 3D một cánh tay robot nhỏ. Mặc dù in nhanh, nhưng nó bị giới hạn phạm vi chuyển động và các khớp nối gây khó khăn trong việc tính toán vị trí servo. https://www.instructables.com/EEZYbotARM/


Sau khi hoàn thiện, chúng mình nhận ra cánh tay này quá yếu và kém chính xác do dùng servo giá rẻ. Chúng mình quyết định chuyển sang phiên bản sử dụng servo lớn hơn với nhiều tự do chuyển động hơn (https://www.instructables.com/3D-Printed-ROBOTIC-ARM/) và tự thiết kế bảng mạch riêng.


Do lệnh phong tỏa, chúng mình gặp khó khăn khi làm việc nhóm. Giải pháp là thiết lập truy cập từ xa vào Raspberry Pi thông qua VNC client và webcam để lập trình viên có thể điều khiển từ nhà.
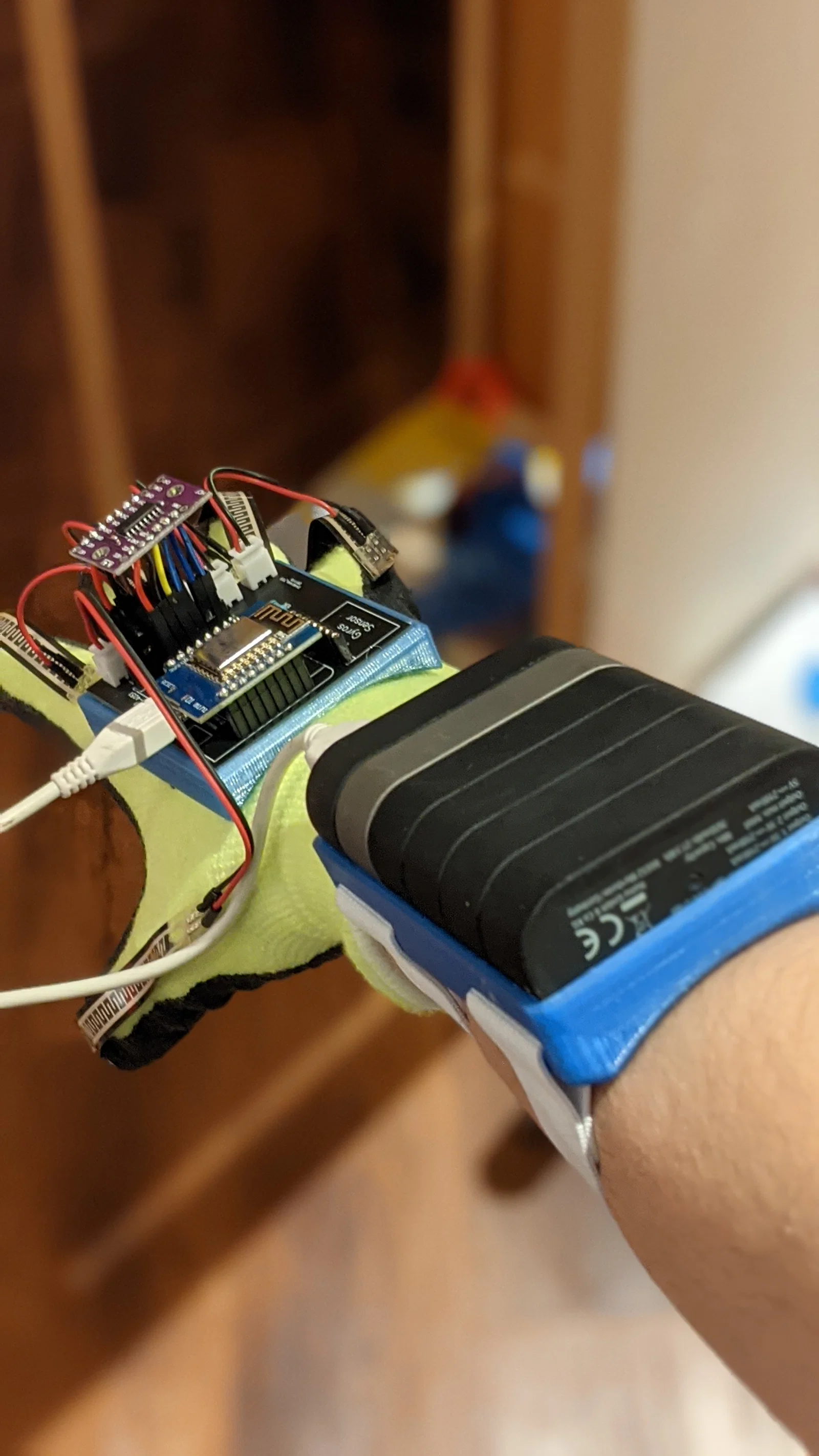
Song song đó, chúng mình thiết kế các bảng mạch in (PCB) cho găng tay, tích hợp Wemos, cảm biến con quay, bộ dồn kênh (multiplexer), cảm biến áp suất và bo mạch header cho Raspberry Pi. Chúng mình đặt hàng tại JLCPCB.


Chúng mình cũng in 3D một giá đỡ cho Raspberry Pi và pin, thiết kế cực kỳ chắc chắn với ren kim loại để vặn vít dễ dàng và không làm hỏng nhựa.

Khi nhận bo mạch, chúng mình gặp chút sự cố về vị trí chân cắm của bộ dồn kênh trong EasyEDA, nên đã phải dùng dây jumper để khắc phục.



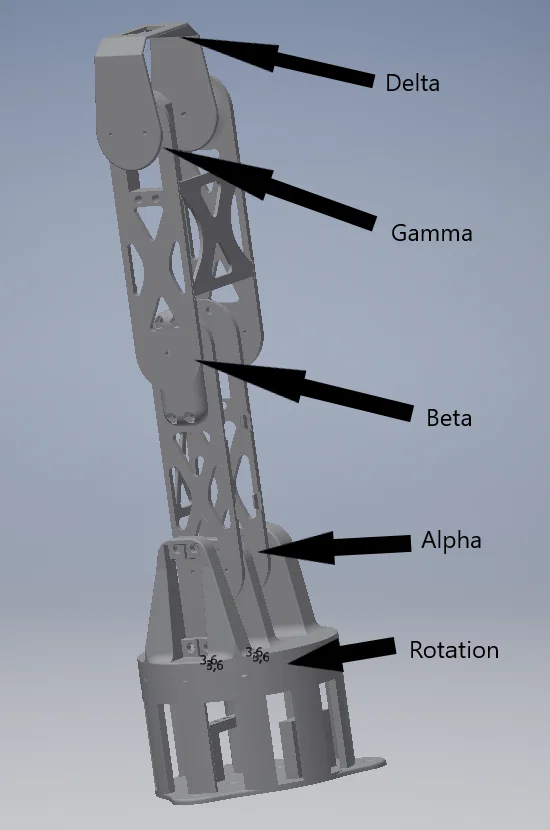
Sau đó, servo ở khớp thấp nhất bị hỏng do quá tải. Chúng mình quyết định tự thiết kế cánh tay mới bằng Inventor, ổn định và mạnh mẽ hơn.


Sau 2 tuần thử nghiệm cảm biến áp suất tự chế không thành công, chúng mình quyết định đặt mua 5 cảm biến áp suất chuyên dụng cho găng tay. Chúng mình cũng in giá đỡ cho bo mạch được uốn cong theo mu bàn tay.

Thách thức tiếp theo là tạo phần đế chịu lực ổn định. Chúng mình đã tự thiết kế ổ bi chặn với bi softair, tuy nhiên gặp khó khăn do dung sai của bi quá nhỏ. Cuối cùng, chúng mình chọn dùng servo 20kg mới để đảm bảo đủ sức mạnh.

Để điều khiển, chúng mình sử dụng thuật toán "Gradient Descent" để tìm vị trí tối ưu cho 4 trục trong không gian 3D.
Kết quả:
Cánh tay trông khá ngầu và di chuyển rất mượt, dù khả năng chịu tải có giới hạn. Chúng mình đã học hỏi được rất nhiều từ dự án này.
Phần mềm:
Inverse kinematik software robotarm
Tổng chi phí: 174,53€
Kết luận:
Đây là dự án lớn đầu tiên của chúng mình. Cảm ơn mọi người đã theo dõi. Hãy cho mình biết suy nghĩ hoặc thắc mắc của các bạn ở phần bình luận nhé!
Xem thêm các thiết kế khác của mình nhé!
Giấy phép

File mô hình















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!