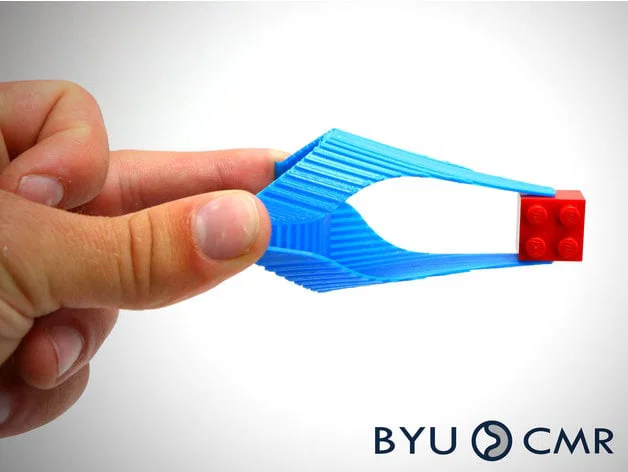
Oriceps: Kẹp gắp lấy cảm hứng từ Origami (Origami Inspired Forceps)

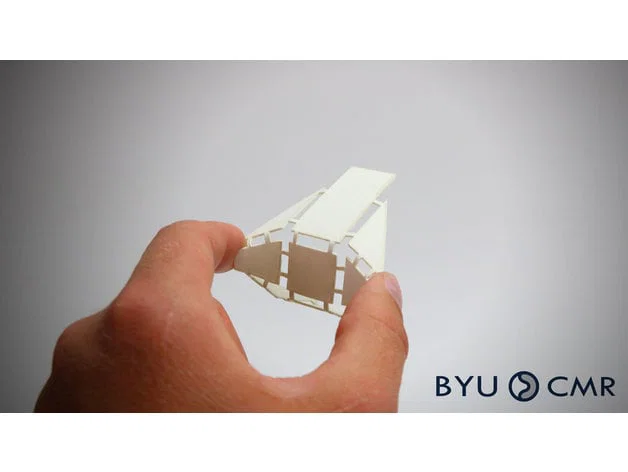
Oriceps là một compliant mechanism lấy cảm hứng từ origami “Chomper” của Shafer, thiết kế để kẹp/gắp vật thể. Có thể in 3D hoặc cắt laser; vật liệu filament ảnh hưởng độ dẻo, độ bền mỏi và lực thao tác.




Mô tả
Summary
Ngoài việc tạo ra những món đồ nhìn vui mắt và cầm chơi thú vị, các nguyên lý origami còn có thể dùng để prototype (tạo mẫu thử) những thiết kế mới, làm ra các dụng cụ hữu ích và giải quyết các vấn đề ngoài đời thực.
Thiết kế Oriceps này là một ví dụ về compliant mechanism (cơ cấu đàn hồi) được lấy cảm hứng từ origami “Chomper” của Shafer, và được tạo ra để ứng dụng như một cặp forceps (kẹp gắp) rồi sau đó được điều chỉnh và triển khai để dùng trên một trong các robot “da Vinci” của Intuitive Surgical. Cơ cấu kẹp này có thể dùng cho các ứng dụng như dụng cụ không gian điều khiển từ xa, các thiết bị phẫu thuật khác, đồ dùng gia đình và đồ chơi.
Oriceps có thể được in 3D hoặc cắt laser. Vật liệu filament sử dụng sẽ quyết định độ mỏi (fatigue) và đặc tính uốn (flex) của cơ cấu. Filament mềm/dẻo hơn sẽ cho ra cơ cấu bền khi dùng nhiều hơn và cần ít lực hơn để thao tác. Filament cứng hơn sẽ cho ra cơ cấu cần nhiều lực hơn để thao tác, nhưng thường sẽ dễ giòn và gãy sau ít lần sử dụng hơn.
Thiết kế này được phát triển bởi Compliant Mechanisms Research Group (CMR) thuộc Brigham Young University (BYU). Theo dõi tụi mình tại @byucmr trên Instagram hoặc ghé trang BYU Compliant Mechanisms Research (CMR) để tìm hiểu thêm về compliant mechanisms.
Standards
Applications
Lesson Plan and Activity
Introduction
Khi nhắc tới origami, mình hay hình dung mấy con thiên nga giấy nhỏ, đồ bói vui (fortune teller), hay phi tiêu ninja. Ngoài việc tạo ra những món đồ nhìn vui mắt và chơi được, nguyên lý origami còn có thể dùng để prototype thiết kế mới, tạo dụng cụ hữu ích và giải quyết vấn đề ngoài đời. Thiết kế Oriceps được lấy cảm hứng từ “Chomper” của Shafer, và được làm để ứng dụng như một cặp forceps lấy cảm hứng từ origami. Forceps là loại nhíp/kẹp gắp thường dùng trong phẫu thuật hoặc trong phòng thí nghiệm. Forceps bằng giấy thì không hữu ích lắm trên bàn mổ hay trong lab, nhưng thiết kế này lại rất có giá trị như một mẫu thử, góp phần cho một số yếu tố của thiết kế cuối cùng.


Action Origami
Action origami là origami có thể “chuyển động” hoặc có bộ phận chuyển động, ví dụ như con chim có thể vỗ cánh hay con ếch có thể nhảy. Thiết kế Oriceps thuộc nhóm action origami vì nó có thể tác động (actuate) sang trạng thái mở hoặc đóng khi có lực đầu vào.
Origami Prototypes
Origami có thể được dùng để prototype đồ nội thất, đèn trang trí, linh kiện robot, dụng cụ gấp gọn, thiết bị không gian triển khai (deployable), và còn nhiều thứ khác nữa. Đây là lựa chọn rất tốt cho giai đoạn phát triển ý tưởng vì giấy rẻ, dễ uốn, và dễ thao tác. Prototype bằng origami cũng có lợi vì có thể giúp mình nhìn ra cách đơn giản hóa thiết kế hoặc làm với ít vật liệu và ít khớp nối hơn. Có thể bạn sẽ cần học một vài nguyên lý cơ bản chi phối origami để tạo được hình dáng/thiết kế mong muốn, nhưng với vài cuốn sách origami, tutorial online và luyện tập nhiều, thì khả năng là vô tận.

Materials for Oriceps Origami Activity
Mỗi học sinh cần:
• Một tờ handout giấy Oriceps
• Kéo (nếu handout chưa được cắt rời)
• Hướng dẫn gấp
• Một bề mặt sạch để thực hiện các nếp gấp
Làm theo 5 bước bên dưới:

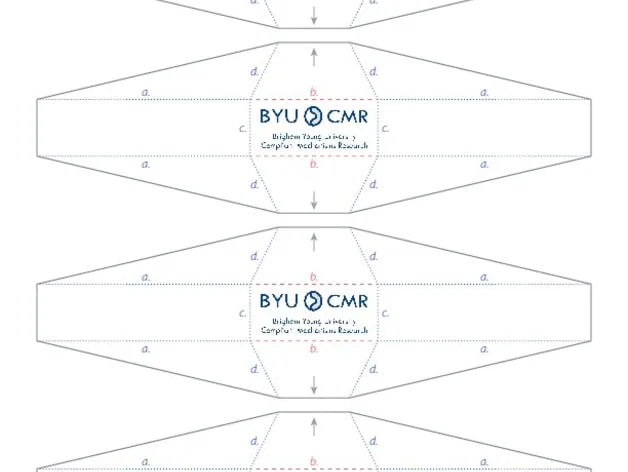
Mình sẽ dùng nếp gấp mountain và valley như minh họa ở trên.

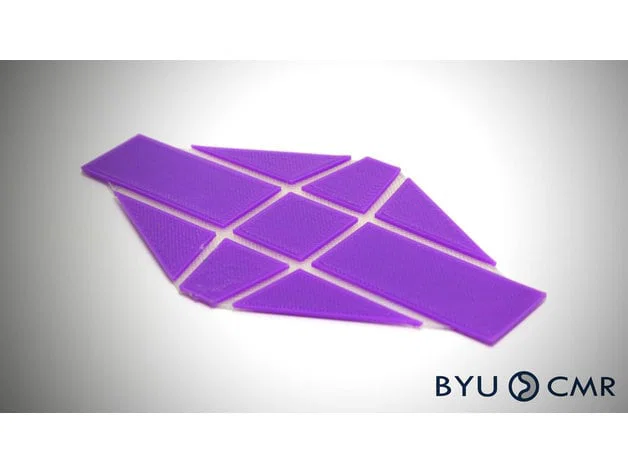
Bước 1: Cắt rời Oriceps.

Bước 2: Tạo nếp gấp mountain ở các đường a và b.

Bước 3: Bây giờ gấp các đường b theo hướng ngược lại để thành nếp gấp valley.

Bước 4: Gấp mountain theo các đường c.

Bước 5: Gấp mountain theo các đường d.

Xong rồi! Bóp hai bên để mở và đóng.

Learn More
Thiết kế này được phát triển bởi Compliant Mechanisms Research Group (CMR) thuộc Brigham Young University (BYU). Theo dõi tụi mình tại @byucmr trên Instagram hoặc ghé trang BYU Compliant Mechanisms Research (CMR) để tìm hiểu thêm về compliant mechanisms.
Xem https://rdcu.be/dnHx0 để đọc một bài trên Nature Communications nói về cách và lý do tụi mình chia sẻ các tài nguyên maker này.
Technical Information
Để xem thông tin kỹ thuật chuyên sâu, tham khảo các ấn phẩm sau:
Edmondson, B.J., Bowen, L.A., Grames, C.L., Magleby, S.P., Howell, L.L., Bateman, T.C., “Oriceps: Origami-Inspired Forceps,” Proceedings of the ASME 2013 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Snowbird, UT, Sept 16-18, 2013, SMASIS2013-3299.
Butler, J., Bowen, L., Wilcox, E., Shrager, A., Frecker, M., von Lockette, P., Simpson, T., Lang, R., Howell, L., Magleby, S., “A Model for Multi-Input Mechanical Advantage in Origami-Based Mechanisms,” Journal of Mechanisms and Robotics, Vol. 10, 061007-1 to 061007-9, doi: 10.1115/1.4041199, 2018.
Để tìm hiểu thêm về compliant mechanisms nói chung, xem trang BYU Compliant Mechanisms Research (CMR) hoặc các cuốn sách này: Compliant Mechanisms, Handbook of Compliant Mechanisms
Intellectual Property
Các file in 3D tải về được cung cấp ở đây có thể được dùng, chỉnh sửa và sử dụng cho mục đích phi thương mại. Để cấp phép công nghệ này cho các ứng dụng thương mại, vui lòng liên hệ:
BYU Technology Transfer Office
3760 Harold B. Lee Library
Brigham Young University
Provo, UT 84602
Phone: (801) 422-6266
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!