Đế kẹp 3D cho cánh tay Robot dùng Servo MG995/MG996

Bạn đang tìm cách nâng cấp hoặc tự chế tạo phần kẹp cho cánh tay robot của mình? Hãy tham khảo ngay thiết kế đế kẹp (gripperBase) tùy chỉnh dành riêng cho các dòng servo phổ biến như MG995, MG996 và Futaba S3003. Với mô hình này, việc lắp đặt phần đầu kẹp cho robot của bạn sẽ trở nên chuyên nghiệp, chắc chắn và dễ dàng hơn bao giờ hết. Thiết kế tối ưu, khả năng tương thích cao với nhiều loại servo actuator trên thị trường, giúp bạn tiết kiệm đáng kể thời gian chế tạo thủ công. Bài viết hướng dẫn chi tiết về cách in, lựa chọn vật liệu như PLA hay PETG và các mẹo nhỏ để tăng độ bám cho ngàm kẹp, đảm bảo cánh tay robot của bạn vận hành trơn tru, hiệu quả nhất trong các dự án DIY tại nhà.


Mô tả
Mod đế kẹp cho cánh tay robot (RobotArm hobby servo gripper mod) cho servo MG995
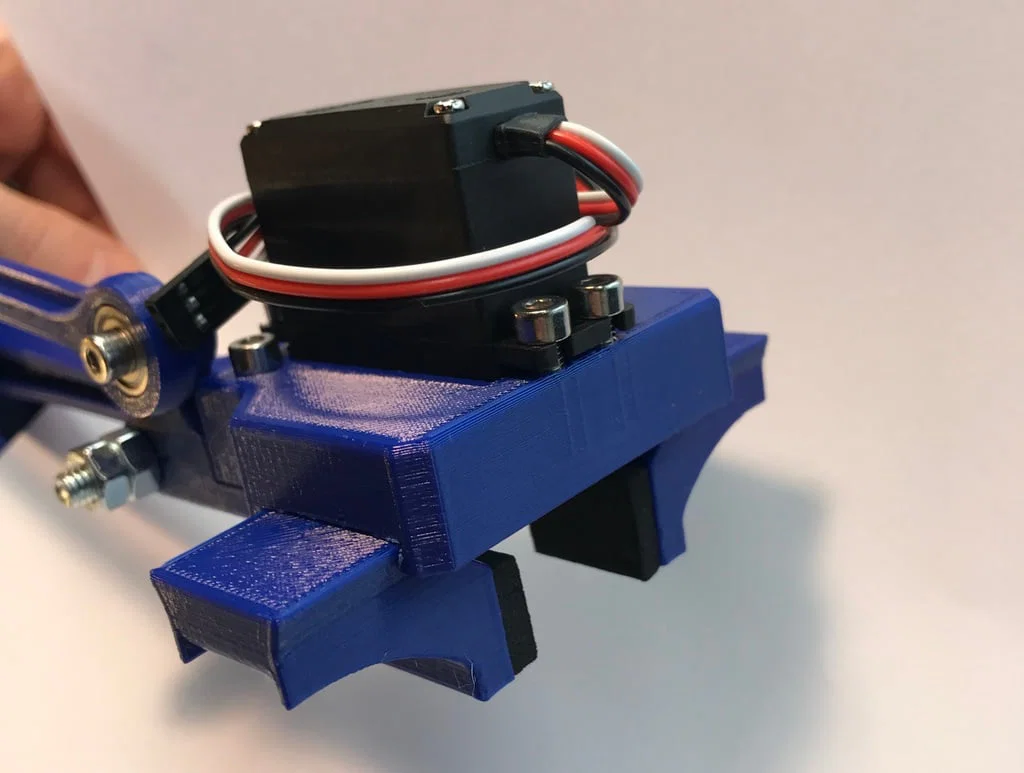
Nếu bạn đang tự chế tạo một cánh tay robot tại nhà và gặp khó khăn trong việc gắn bộ phận kẹp (gripper) vào các loại servo phổ biến, thì thiết kế này chính là giải pháp dành cho bạn. Đây là phiên bản đế kẹp (gripperBase) đã được tùy chỉnh chuyên biệt để tương thích hoàn hảo với các loại servo actuator như MG995, MG996 hoặc dòng Futaba S3003 và các phiên bản tương đương. Thiết kế này giúp việc lắp đặt trở nên gọn gàng, chắc chắn và tối ưu hóa khả năng vận hành cho phần đầu kẹp của cánh tay robot.
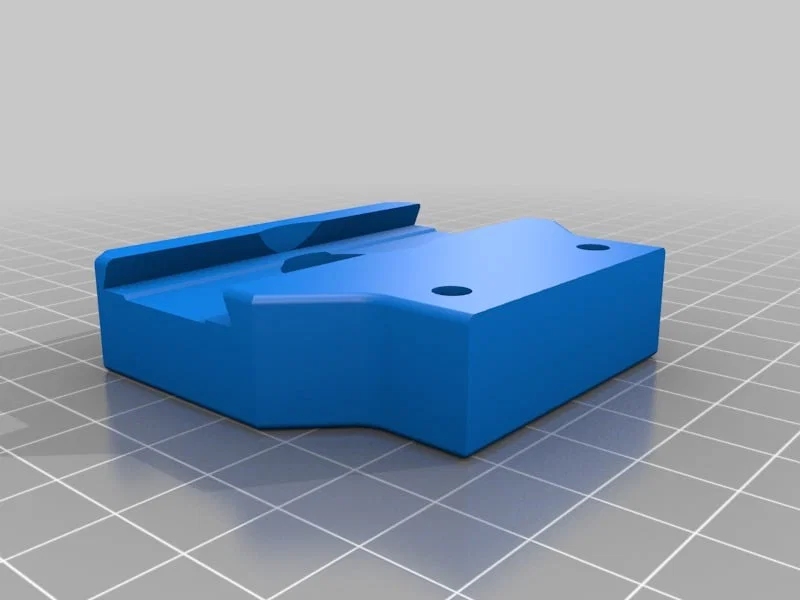
Sản phẩm này được thiết kế để giải quyết vấn đề tương thích vốn rất phổ biến trong cộng đồng người chơi robot DIY. Bằng cách sử dụng đế in 3D này, bạn có thể dễ dàng cố định cụm servo lên cấu trúc cánh tay mà không cần phải chế cháo phức tạp hay khoan đục thủ công gây mất thẩm mỹ. Phần đế có các lỗ bắt vít được tính toán chính xác, giúp kết nối vững chãi với servo, đảm bảo cánh tay robot có thể gắp các vật thể nhẹ một cách ổn định và chính xác trong quá trình hoạt động.
Việc in và lắp ráp bộ phận này khá đơn giản, phù hợp cho cả những người mới bắt đầu làm quen với lĩnh vực robot 3D. Dưới đây là một số thông tin kỹ thuật và lưu ý quan trọng để bạn đạt được kết quả tốt nhất:
- Khả năng tương thích: Hỗ trợ tốt nhất cho các dòng servo kích thước chuẩn như MG995, MG996, và Futaba S3003.
- Vật liệu in khuyến nghị: Nên sử dụng PLA hoặc PETG để đảm bảo độ cứng vững cho khung xương robot.
- Thiết lập in 3D: Bạn nên để infill khoảng 30-40% và sử dụng độ dày tường (wall line count) ít nhất 3 lớp để chịu được lực siết ốc vít.
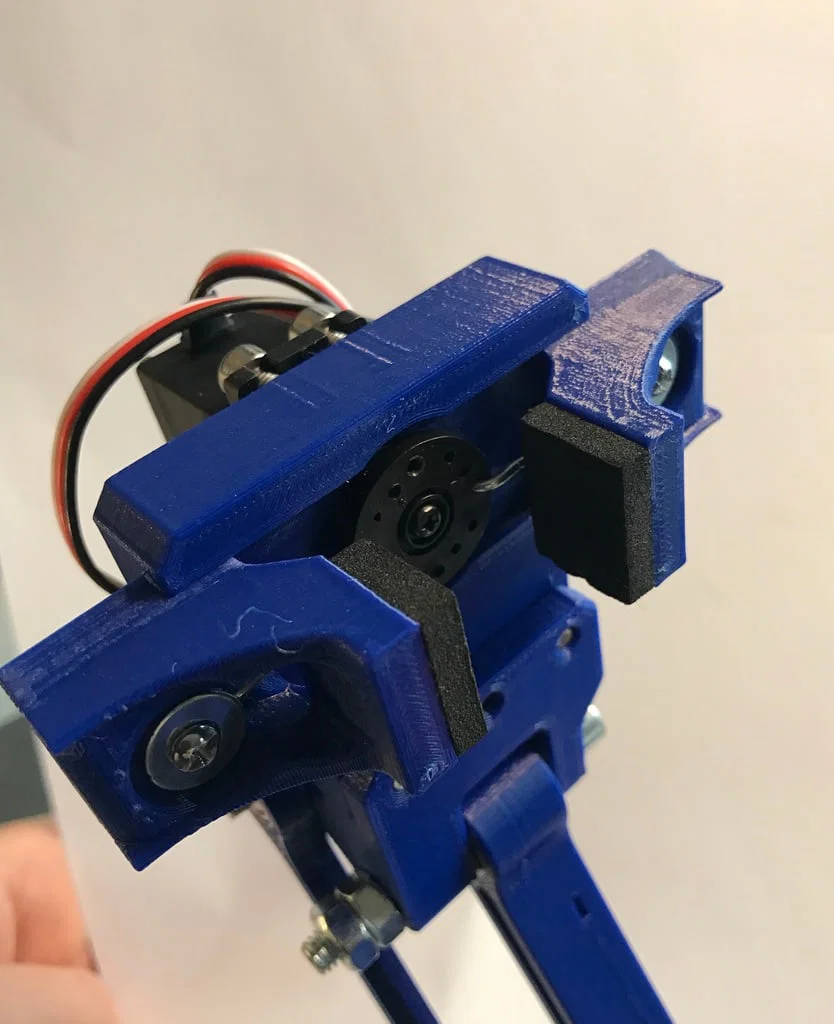
- Hoàn thiện sản phẩm: Phần mặt tiếp xúc của ngàm kẹp có thể dán thêm một lớp xốp mỏng hoặc cao su để tăng độ bám khi gắp các vật thể trơn.
- Lưu ý lắp ráp: Hãy kiểm tra kỹ các ốc vít sau khi lắp, đảm bảo chúng không bị quá lỏng hoặc quá chặt gây biến dạng nhựa khi vận hành servo liên tục.
- Tối ưu hóa: Nếu in bằng PLA, tránh để mô hình ở nơi có nhiệt độ quá cao để đảm bảo độ bền lâu dài cho cấu trúc.
Hy vọng rằng linh kiện nhỏ này sẽ giúp dự án cánh tay robot của bạn hoàn thiện hơn và mang lại trải nghiệm thú vị trong quá trình khám phá kỹ thuật điều khiển robot.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!