Thiết kế khung gầm robot VEX 6 động cơ (VEX V5 Chassis Layout)

Bạn đang tìm kiếm một cấu trúc khung gầm robot ổn định cho dự án VEX V5 của mình? Đây là mô hình khung gầm (chassis) 6 động cơ cơ bản, được thiết kế chuyên dụng với 4 bánh xe omni để tối ưu hóa khả năng di chuyển linh hoạt. Được xây dựng bài bản trong Fusion 360, thiết kế này mang đến sự cân bằng hoàn hảo giữa sức mạnh truyền động và khả năng điều hướng trên sân đấu. Đây là tài liệu tham khảo cực kỳ hữu ích cho các đội thi đấu robot, giúp bạn rút ngắn thời gian thiết kế và tập trung vào việc hoàn thiện các tính năng nâng cao. Hãy tải ngay tệp thiết kế này và bắt đầu xây dựng chiến binh robot của riêng bạn. Lưu ý, hãy luôn ghi công nhóm 17814Z nếu bạn lấy cảm hứng từ cấu trúc này cho cuốn nhật ký kỹ thuật của đội.






Mô tả
Thiết kế khung gầm robot VEX 6 động cơ (Chassis layout)
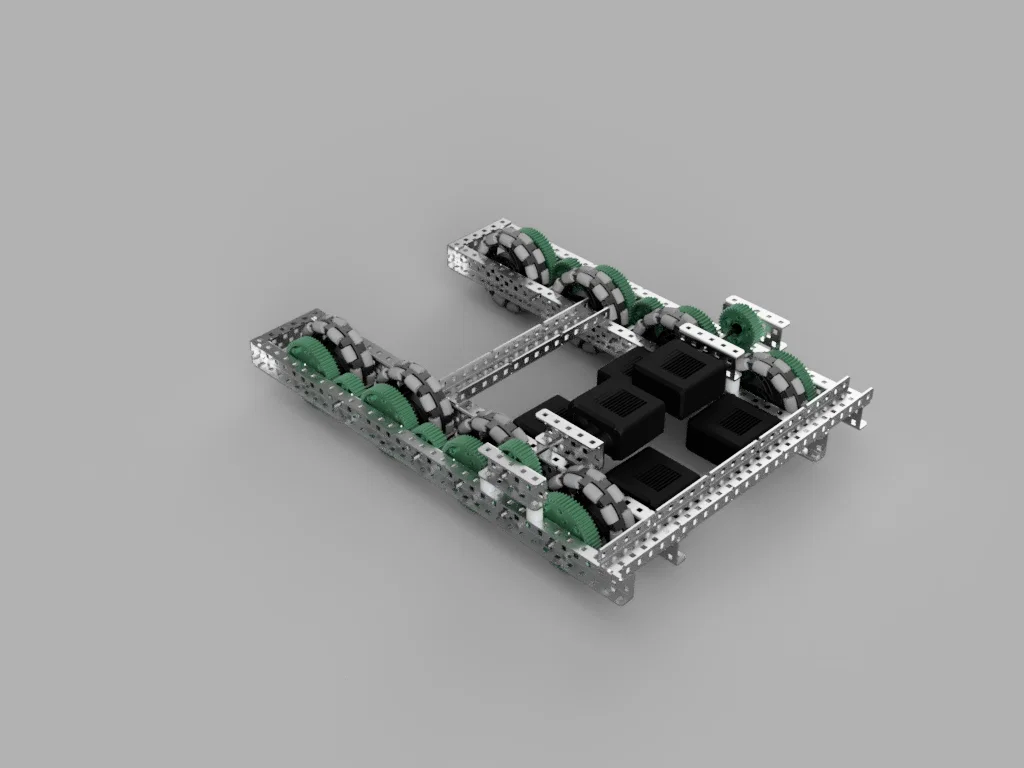
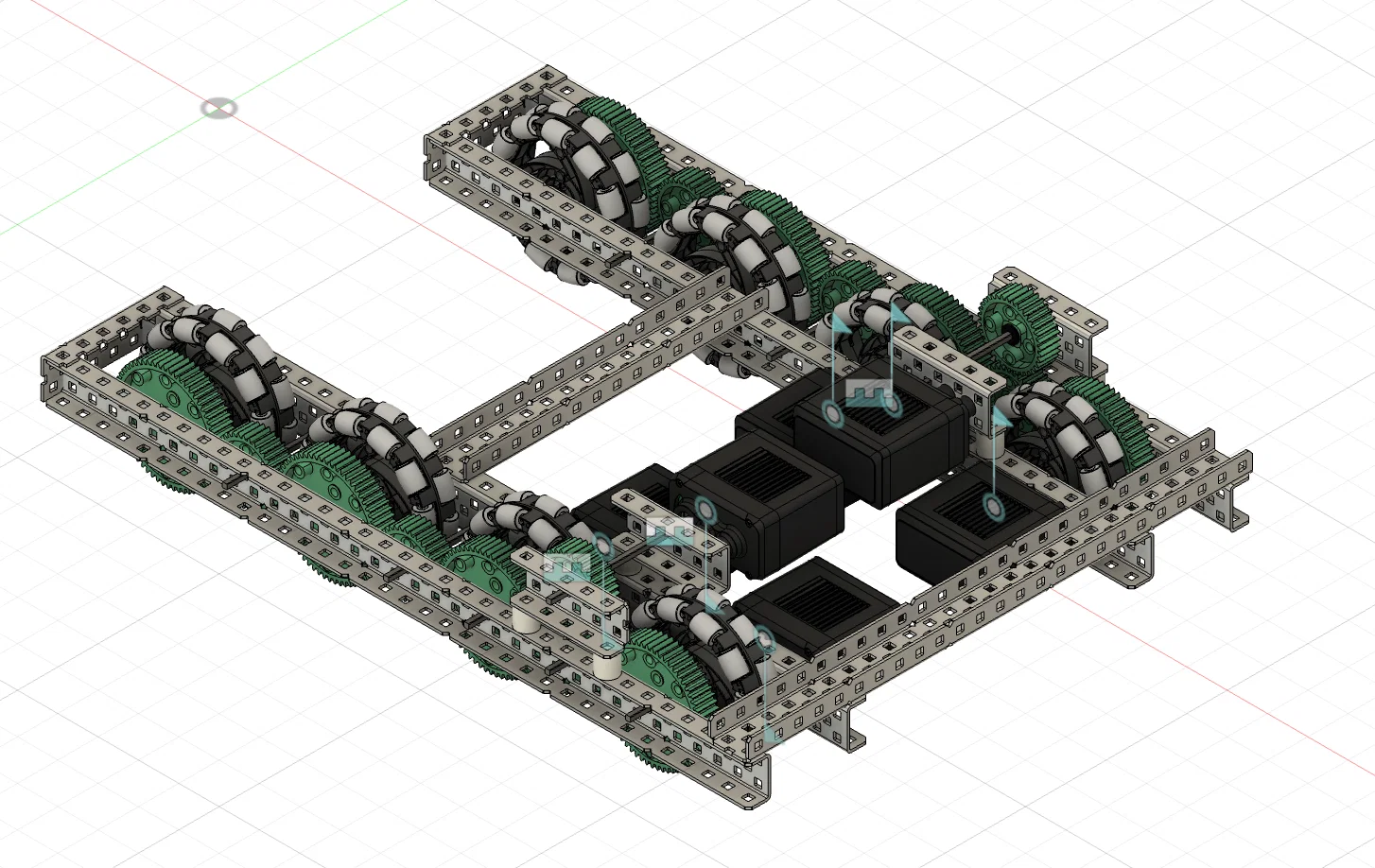
Đây là mô hình thiết kế khung gầm (chassis) cơ bản dành cho hệ thống robot VEX V5, được tối ưu hóa với hệ thống truyền động 6 động cơ mạnh mẽ. Mô hình này là giải pháp lý tưởng cho các bạn đang bắt đầu tìm hiểu về cơ khí trong bộ môn VEX Robotics, giúp bạn hình dung cách bố trí các linh kiện quan trọng như động cơ và hệ thống bánh xe omni để đạt hiệu suất di chuyển linh hoạt nhất. Với cấu trúc này, bạn có thể dễ dàng tùy chỉnh hoặc phát triển thêm các module khác phía trên khung chính tùy theo mục đích thi đấu cụ thể.
Thiết kế sử dụng 4 bánh xe omni cho phép robot có thể di chuyển linh hoạt theo nhiều hướng, kết hợp cùng hệ thống truyền động thông qua các bánh răng màu xanh đặc trưng. Cách bố trí tập trung vào sự cân bằng, giúp robot ổn định hơn khi thực hiện các pha tăng tốc hoặc đổi hướng đột ngột trên sân đấu. Đây là nền tảng vững chắc, được tạo ra từ phần mềm Fusion 360, rất phù hợp để làm mẫu tham khảo hoặc làm bộ khung gốc cho các dự án robot thi đấu cần sự bền bỉ và tốc độ.
Một số lưu ý quan trọng khi bạn sử dụng thiết kế này cho dự án của mình:
- Cấu hình 6 động cơ: Cung cấp lực kéo mạnh mẽ và khả năng phản hồi nhanh, phù hợp cho các robot cần tốc độ cao.
- Hệ thống bánh omni: Giúp robot xoay sở linh hoạt, dễ dàng thực hiện các thao tác cua gấp hoặc di chuyển ngang tùy vào cấu hình lập trình.
- Kiểm tra khớp nối: Hãy chắc chắn các bánh răng được lắp đặt đúng khớp, không quá chặt gây ma sát hoặc quá lỏng làm giảm hiệu suất truyền động.
- Khả năng mở rộng: Phần khung rỗng ở giữa và các thanh nhôm cấu trúc cho phép bạn gắn thêm các cánh tay robot hoặc cơ cấu thu gom vật phẩm.
- Ghi công tác giả: Nếu các bạn sử dụng thiết kế này làm tài liệu tham khảo trong cuốn sổ tay (notebook) dự án của mình, đừng quên ghi rõ nguồn là từ đội 17814Z nhé.
- Bảo trì định kỳ: Sau mỗi lần vận hành, hãy kiểm tra các ốc vít và độ khít của các trục bánh xe để tránh tình trạng lỏng lẻo do rung lắc khi di chuyển.
Việc sở hữu một khung gầm được thiết kế chuẩn chỉnh sẽ giúp bạn tiết kiệm được rất nhiều thời gian trong quá trình lắp ráp robot thực tế. Hy vọng mô hình này sẽ là nguồn cảm hứng tuyệt vời cho dự án VEX Robotics sắp tới của các bạn.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!