Chain Drive Worx Landroid Robot - Bộ truyền động xích in 3D cho robot cắt cỏ

Bộ chain drive in 3D cho Worx Landroid giúp giảm làm hư cỏ, hạn chế kẹt và không còn đào lỗ do bánh xe. Dễ in, dễ lắp nhưng cần cắt nhẹ chassis và chỉnh trạm sạc. Đã test trên WG765e.



































Mô tả
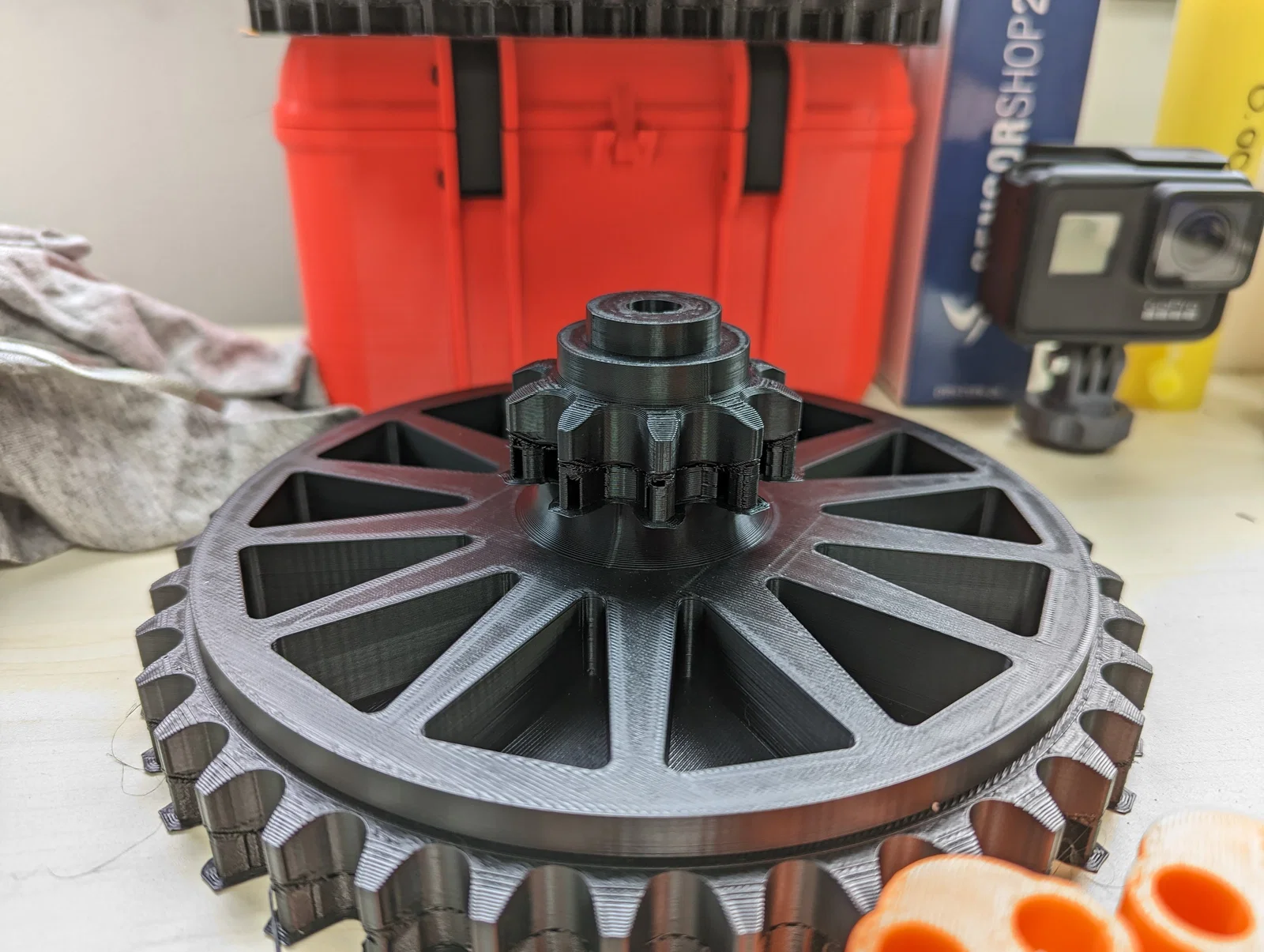
Mình không thích bộ bánh xe zin của con robot này vì nó làm hư mặt cỏ. Nên mình làm một bộ chain drive (truyền động xích) có thể in 3D hoàn toàn cho nó. Với mình thì chạy quá ổn. Không còn bị kẹt nữa, cũng không còn đào lỗ trên cỏ do bánh xe nữa.
In thì dễ, gắn cũng dễ. Nhưng bạn sẽ cần cắt phần chassis một chút, và trạm sạc cũng phải chỉnh sửa nhẹ (cắt bằng máy mài).
Đây là một dự án vui và mình hưởng lợi nhiều, vì giờ robot chạy ổn định không gặp vấn đề.
Mọi người để lại comment / like giúp mình nhé. Có thể còn chỗ nào đó mình cần chỉnh sửa.
Hiện tại đang chạy và đã test trên mẫu WG765e.
Printing:
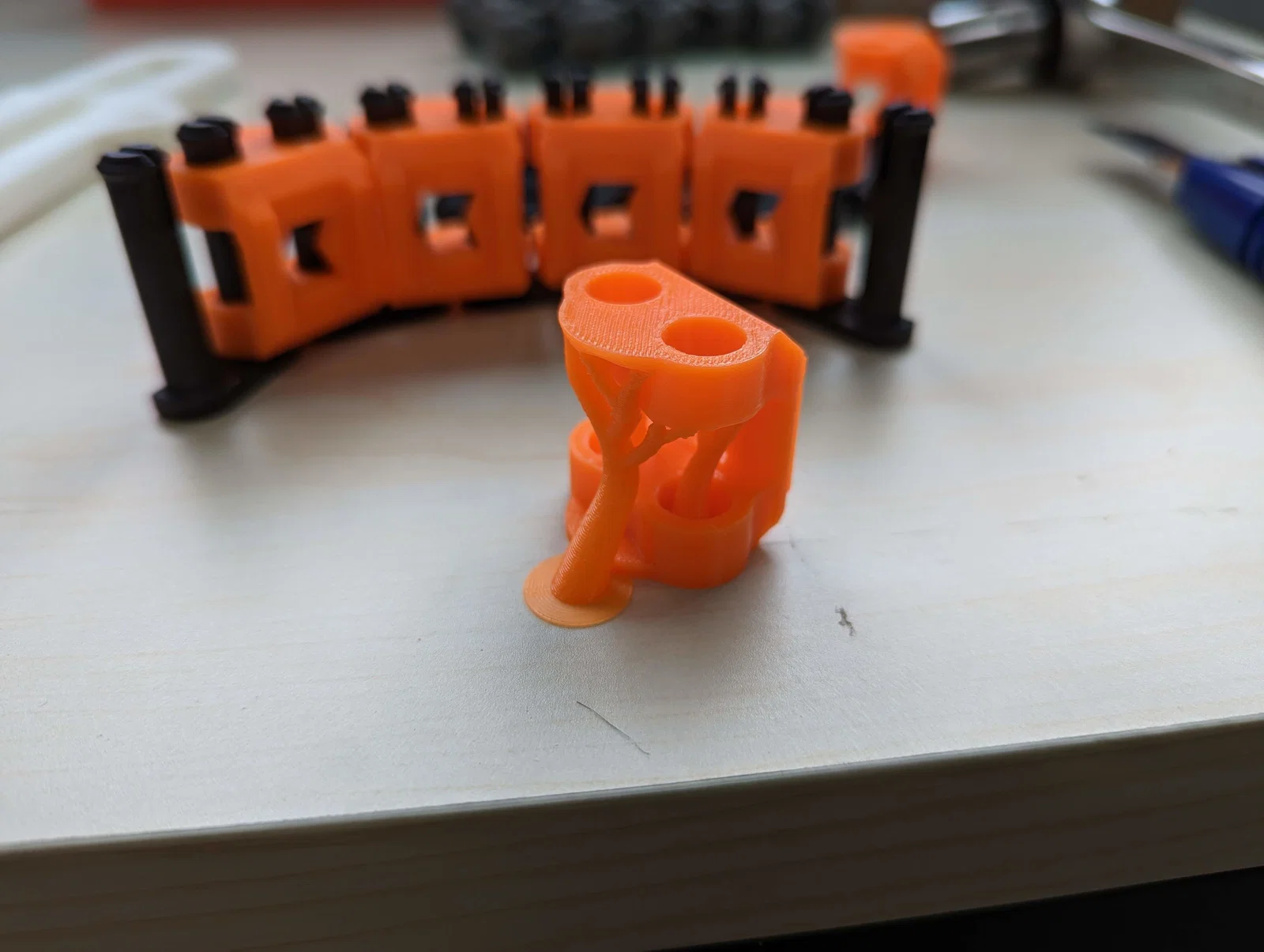
- Mình khuyên in các part bằng PETG (vì PLA để ngoài trời không bền lâu). Riêng các mắt xích mình in bằng ABS…
- Đừng in quá nhiều mắt xích trong một lần, để độ bám lớp (layer adhesion) cho tốt (mình in 6 cái/lần và thấy ổn)
- Part “Aufnahmearm” cần mirror 1 lần. Tức là in 1 cái như file gốc, rồi mirror trong slicer và in thêm 1 cái nữa. Part này nhớ in 4–5 Walls và Bottom/Top layers!! Làm sao cho nó cứng nhất có thể
- Resolution: 0.2, Infill ~25%, Wall perimeter 3–4
What you also need:
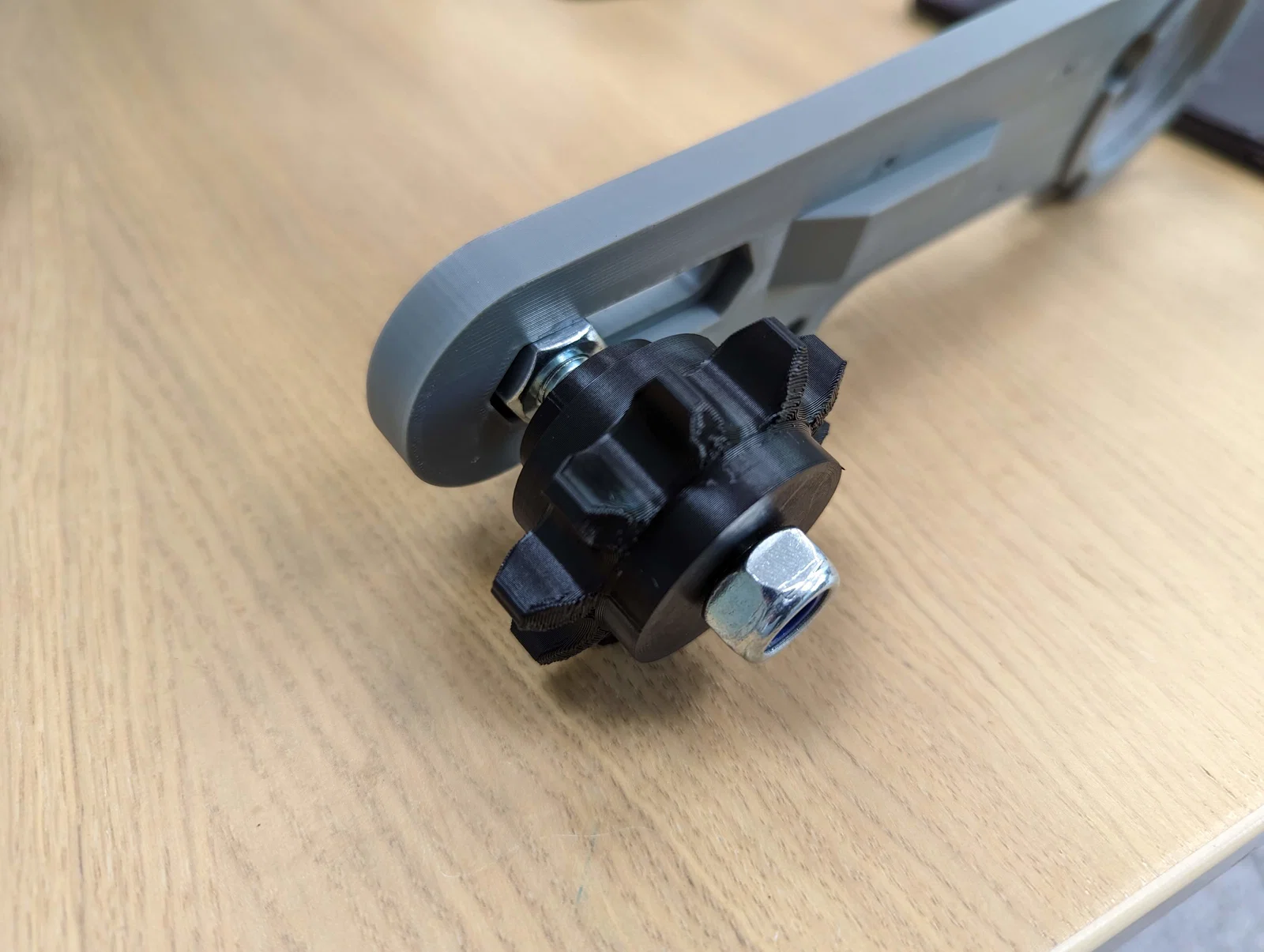
- Ty ren M8 dài khoảng 330mm (1x)
- Đai ốc M8 (4x)
- Vít M10x60 (2x)
- Đai ốc tự hãm M10 (2x)
- Đai ốc M10 (2x)
- Long đền M10 (2x)
- Long đền M8 (4x)
- Vít M3x16 (8x)
Giấy phép

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!