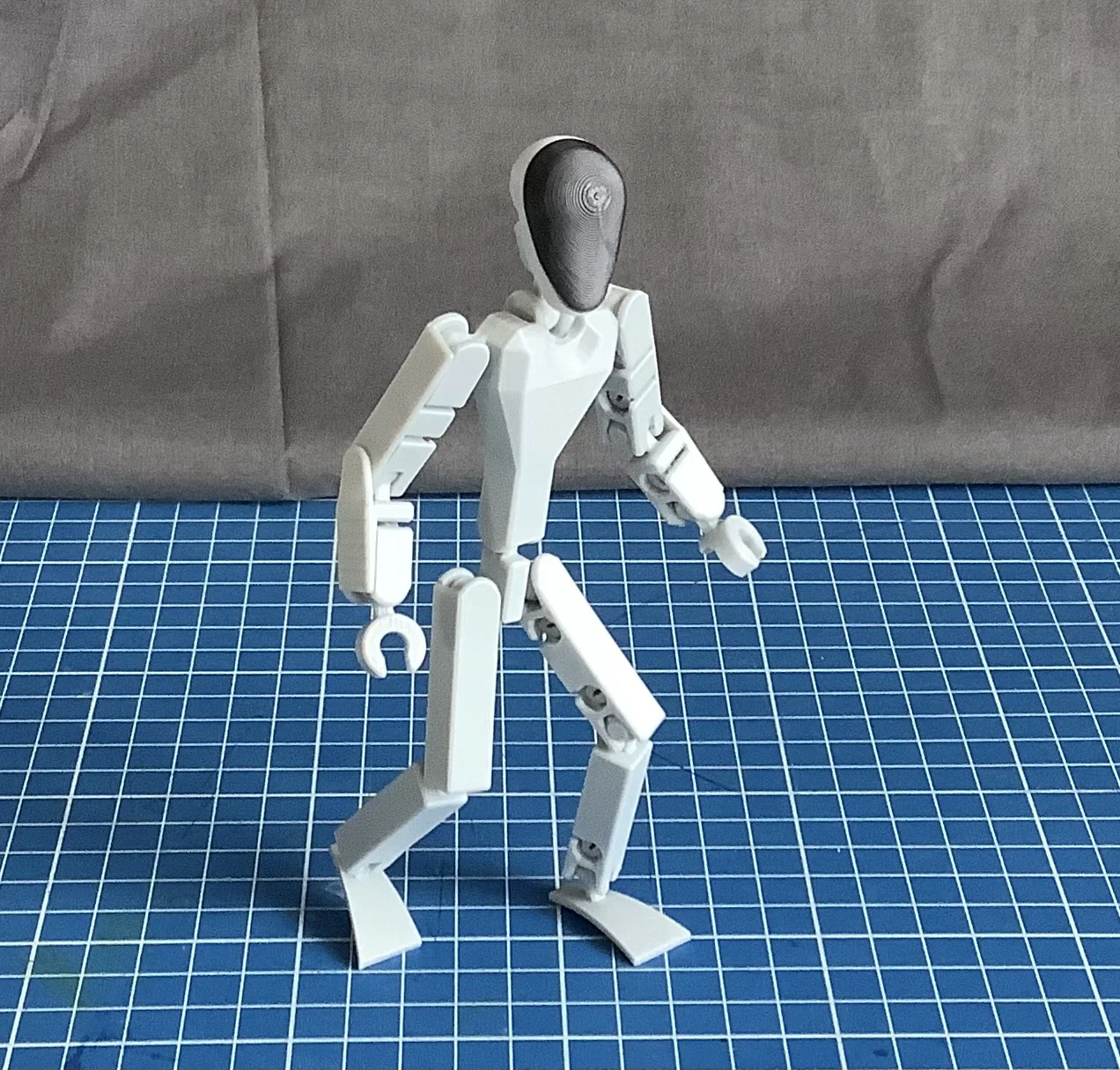
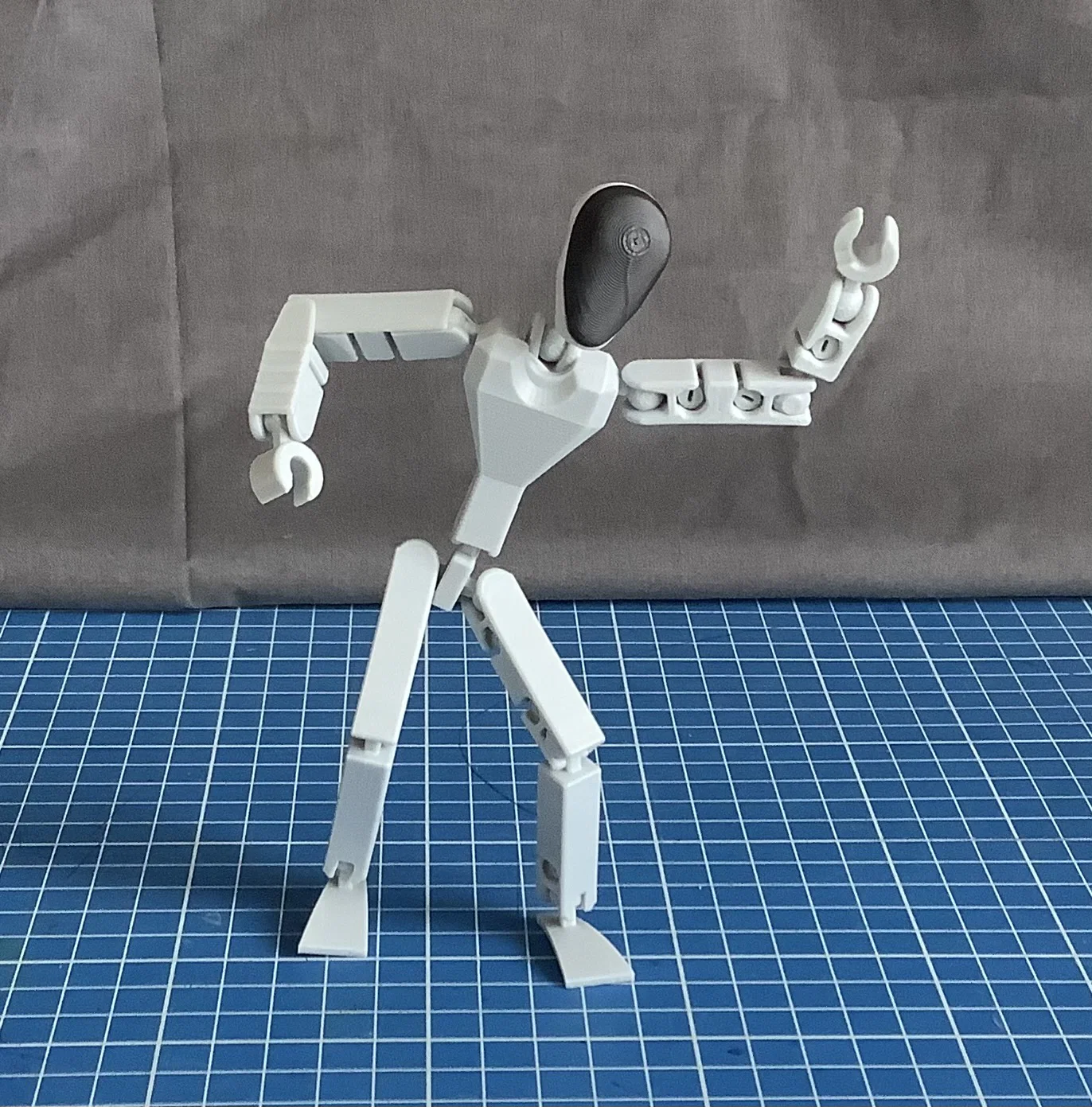
Robot AI: tạo dáng linh hoạt, lắp ráp dễ dàng

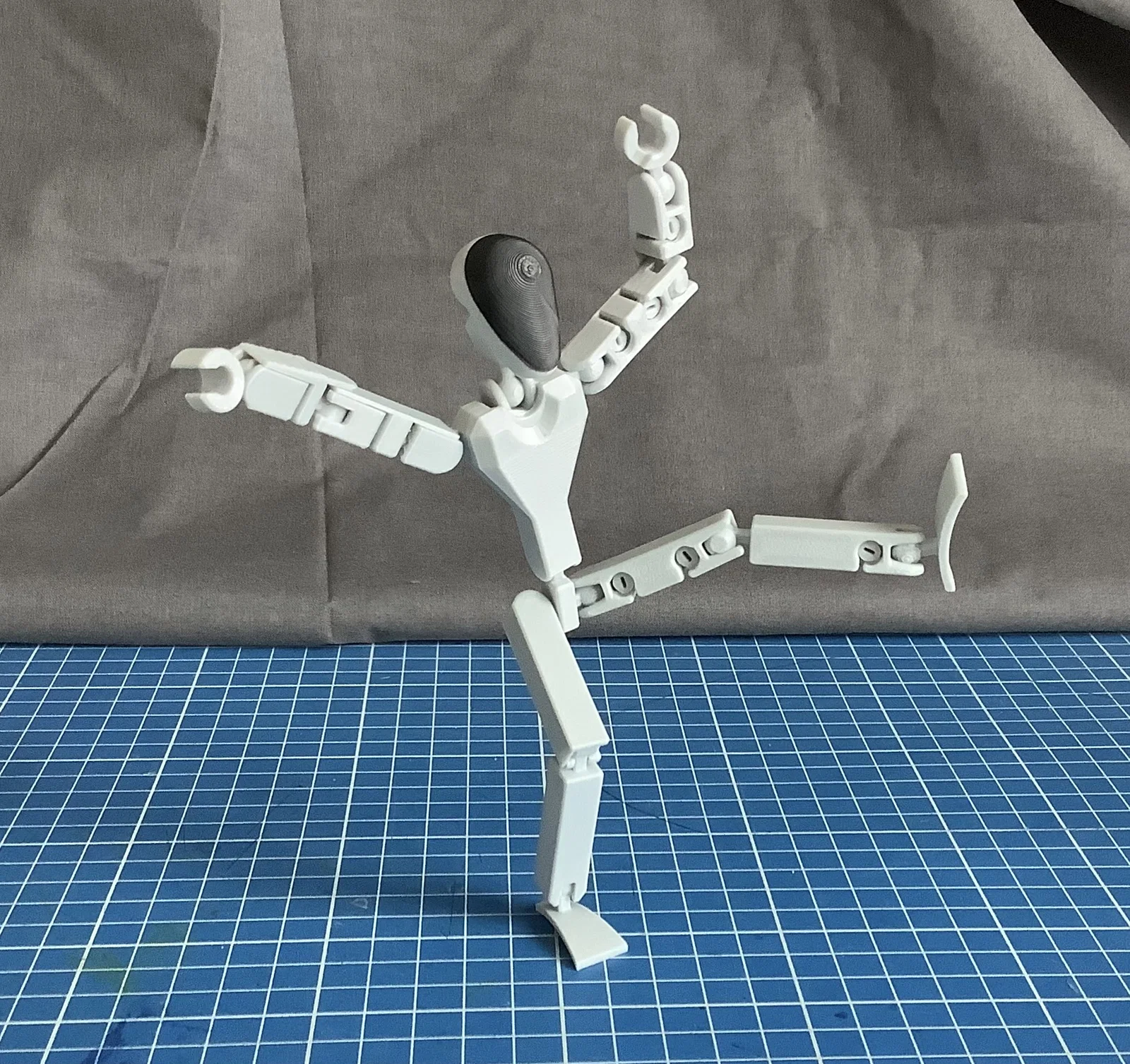
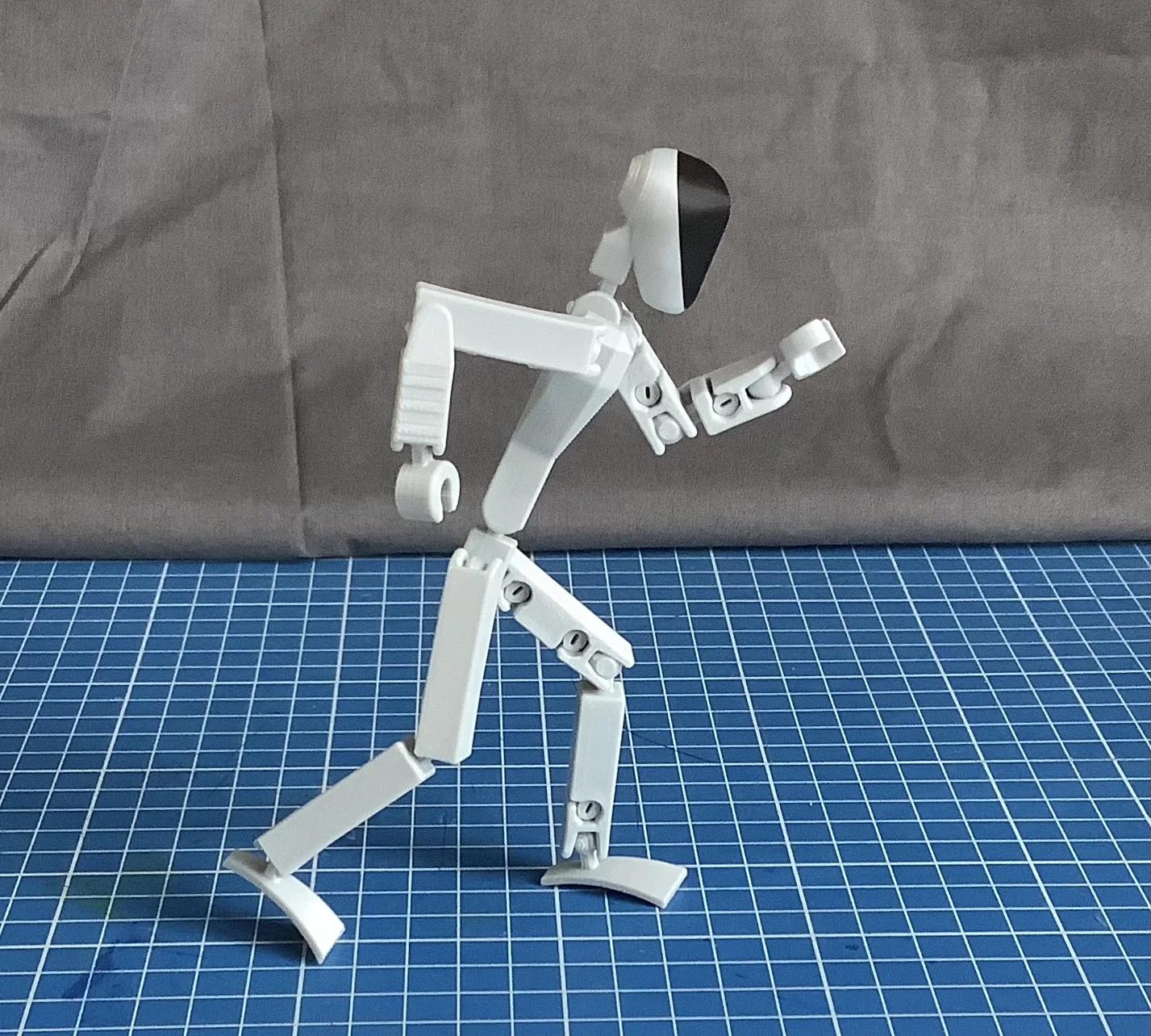
Mẫu robot phong cách AI kiểu OpenAI/Tesla, khớp ball joint tạo dáng linh hoạt. Khuyến nghị in PLA (STL) tách rời để dễ và ổn định hơn, nozzle 0.4, layer 0.2, không support/brim; lắp ốc để siết khớp.






Mô tả
Mẫu này có thể in print-in-place hoàn toàn, nhưng mình thấy in từng phần riêng rồi lắp ráp sẽ dễ và ổn định hơn. Với lại chiếm ít chỗ trên build plate hơn.
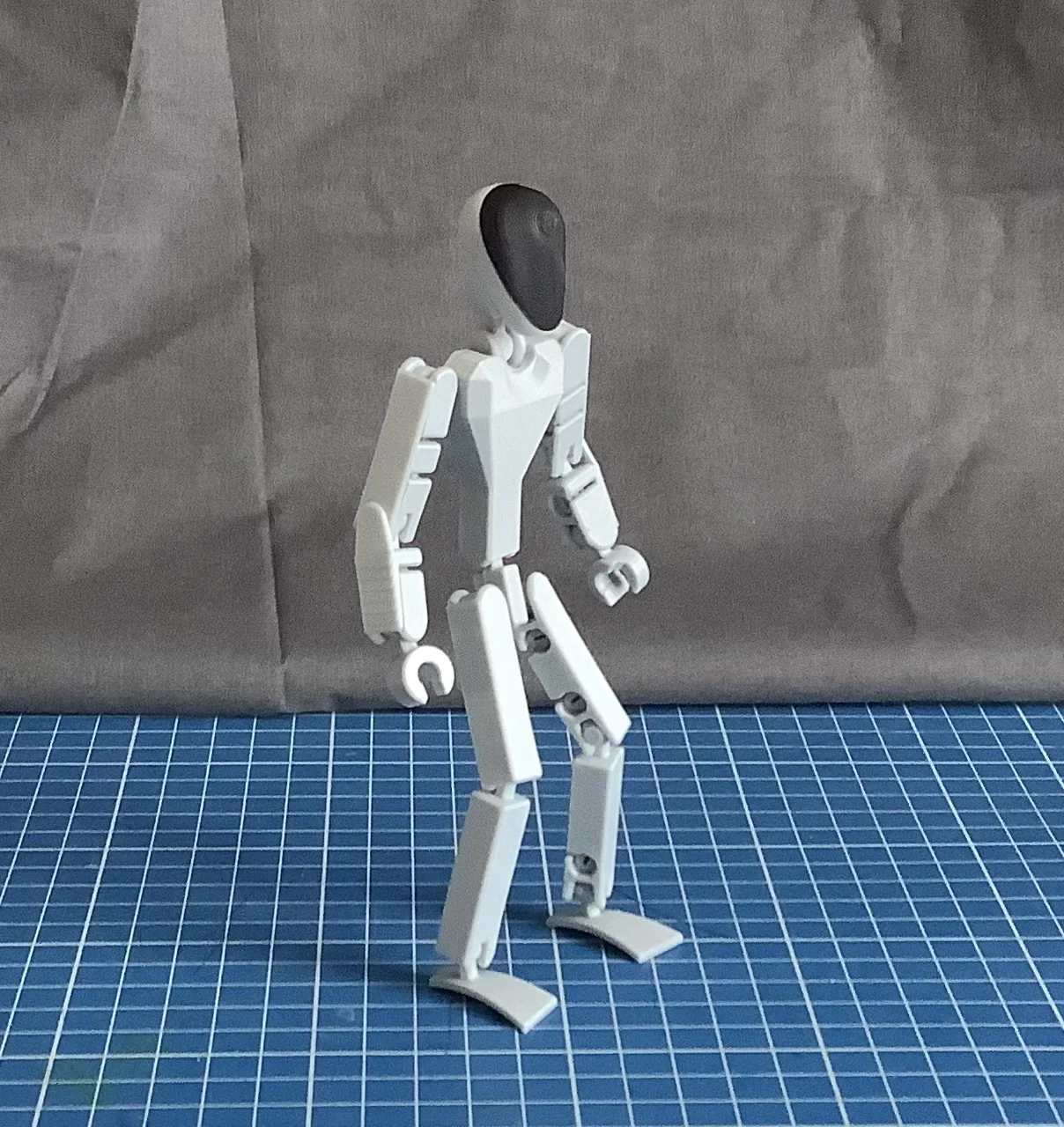
Mình in PLA trên BambuLab P1S, setting thường 0.2. Chỉ 2 giờ cho các phần màu xám. Bắt buộc: layer 0.2 (mẫu được thiết kế cho mức này), nozzle 0.4. Không cần support, không cần brim. Walls: 6 lines để chắc chắn độ bền. Đừng dùng PLA cũ bị ẩm (mình đã lỡ dùng) vì vài chi tiết sẽ bị gãy. In phần mặt (face) bằng màu đen.
In xong các phần, gỡ support:
- dưới các ball joints
- trong khe phía sau cho đầu gối, mắt cá và khuỷu tay (có một miếng vuông nhỏ để cạy ra bằng tua vít)
- thân có ball joints với một “pinch support” bao quanh. Gỡ bằng kìm: bóp vào 2 tay của phần pinch, nó sẽ mở ra, rồi lấy nó ra.
Nếu chưa rõ thì xem video:
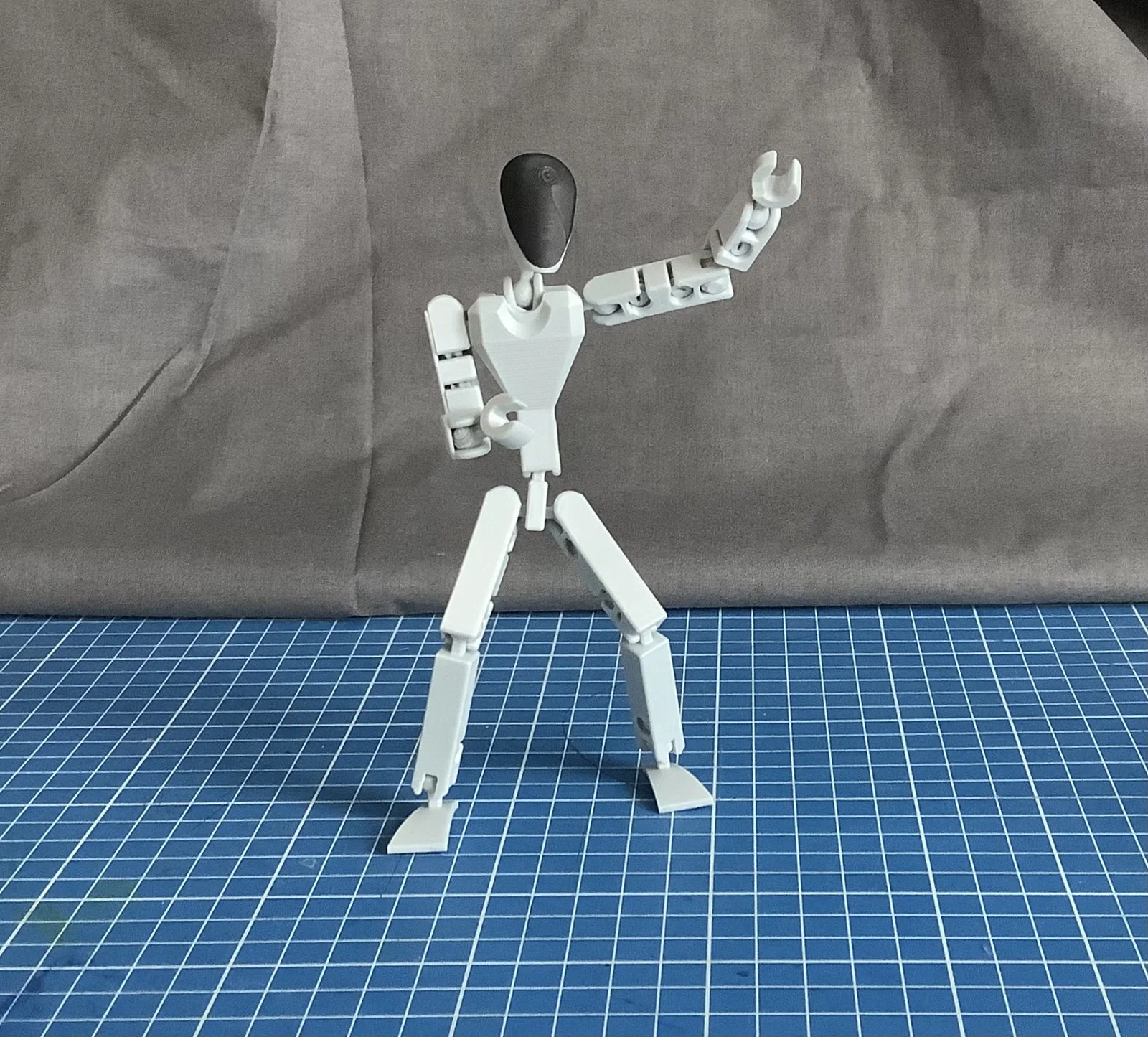
Gắn chân và tay vào các ball joints trên thân.
Dán phần mặt màu đen lên đầu.
Xoay các khớp tới khi chúng lỏng và hơi lắc. Sau đó lắp ốc vào và siết để làm chặt khớp (đừng siết quá).
Mẫu dùng thiết kế ball joint gen#3 của mình, cộng thêm một biến thể dạng trụ (cho đầu gối và khuỷu tay)
MÌNH RẤT MONG NHẬN ĐƯỢC PHẢN HỒI: nên hãy thả like, bình luận, đăng sản phẩm bạn in được. Cảm ơn.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!