Arctic Tinyrider RC snowmobile (snowmobile RC thu nhỏ 0,6x)

Arctic Tinyrider RC snowmobile bản open source thu nhỏ tỉ lệ 0,6: dễ in, dễ ráp, mạnh và bền. Dùng linh kiện phổ thông (M3, MR128, 2212/2200KV, ESC 30A), có gợi ý vật liệu PLA/PETG/TPE và setting in.







Mô tả
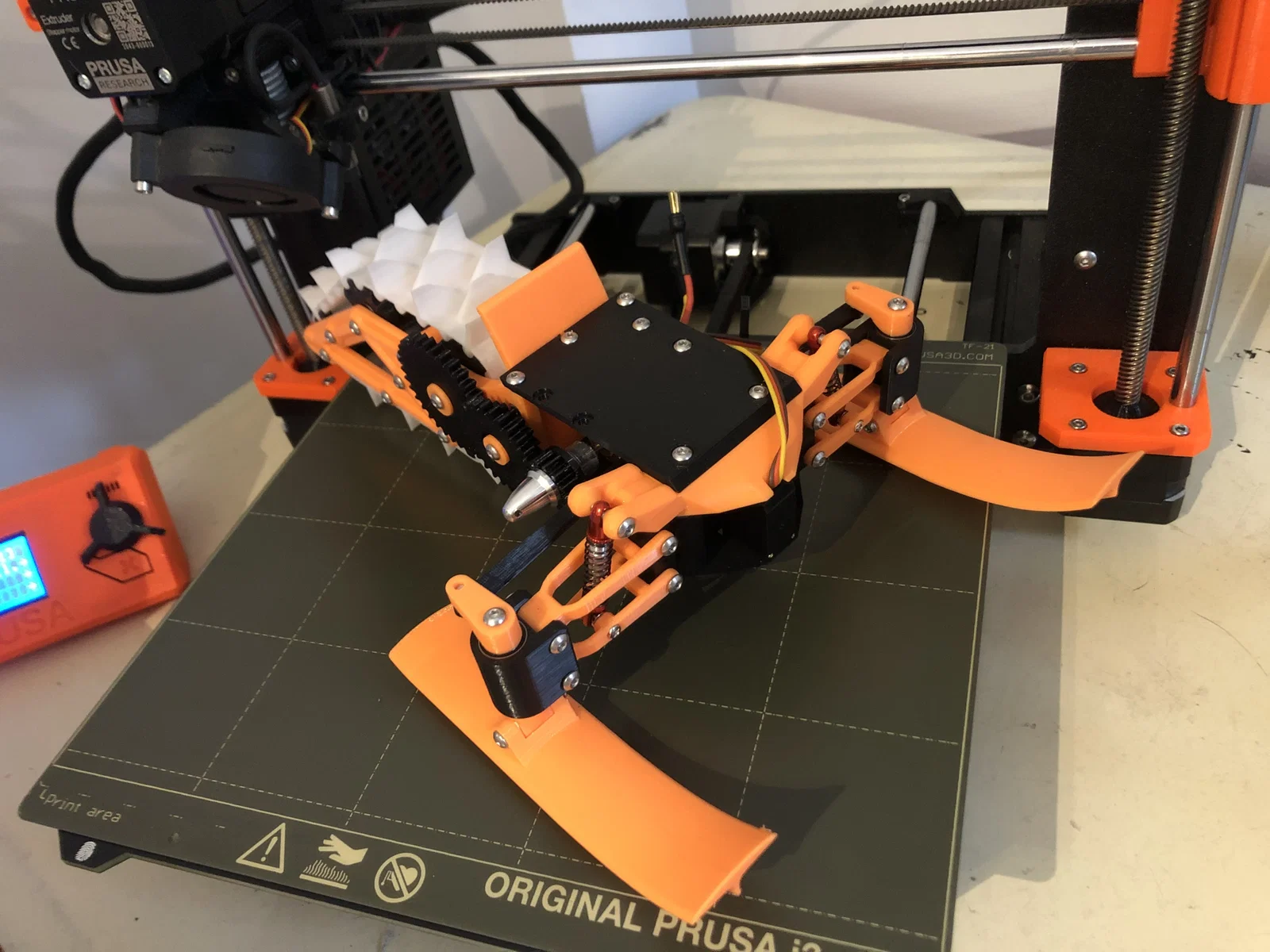
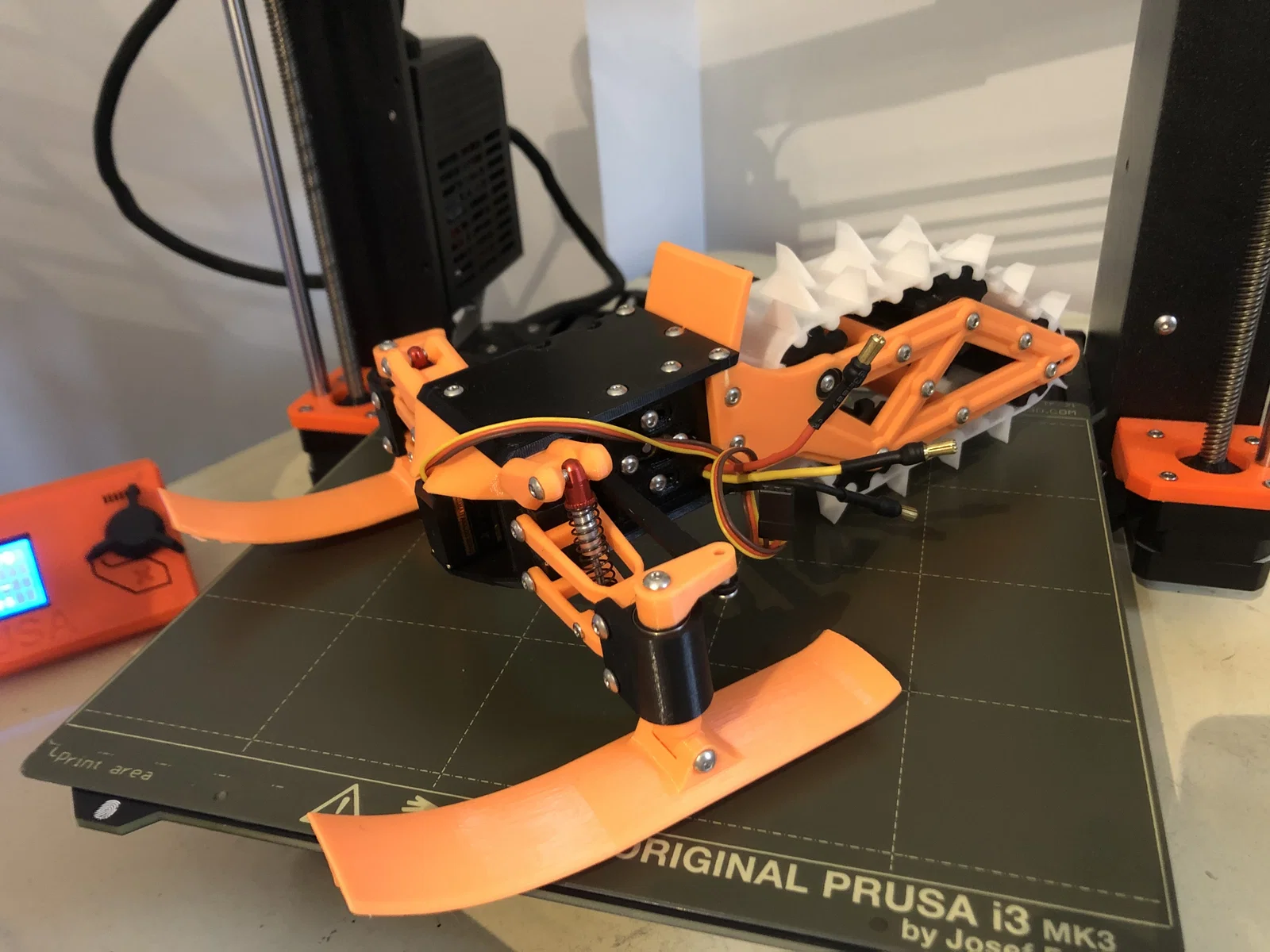
Đây là bản remix của mình, thu nhỏ từ mẫu snowmobile của 3Drcnc.
Mình đã làm và test rất nhiều cho dự án open source này để nó dễ in, dễ ráp, mạnh, bền, và dễ mua linh kiện để làm (dùng cùng loại ốc và vòng bi cho toàn bộ).
Mô tả dưới Video:
Video hướng dẫn lắp (Build Guide):
Video chạy thử (Demonstration):
Những thứ bạn cần:
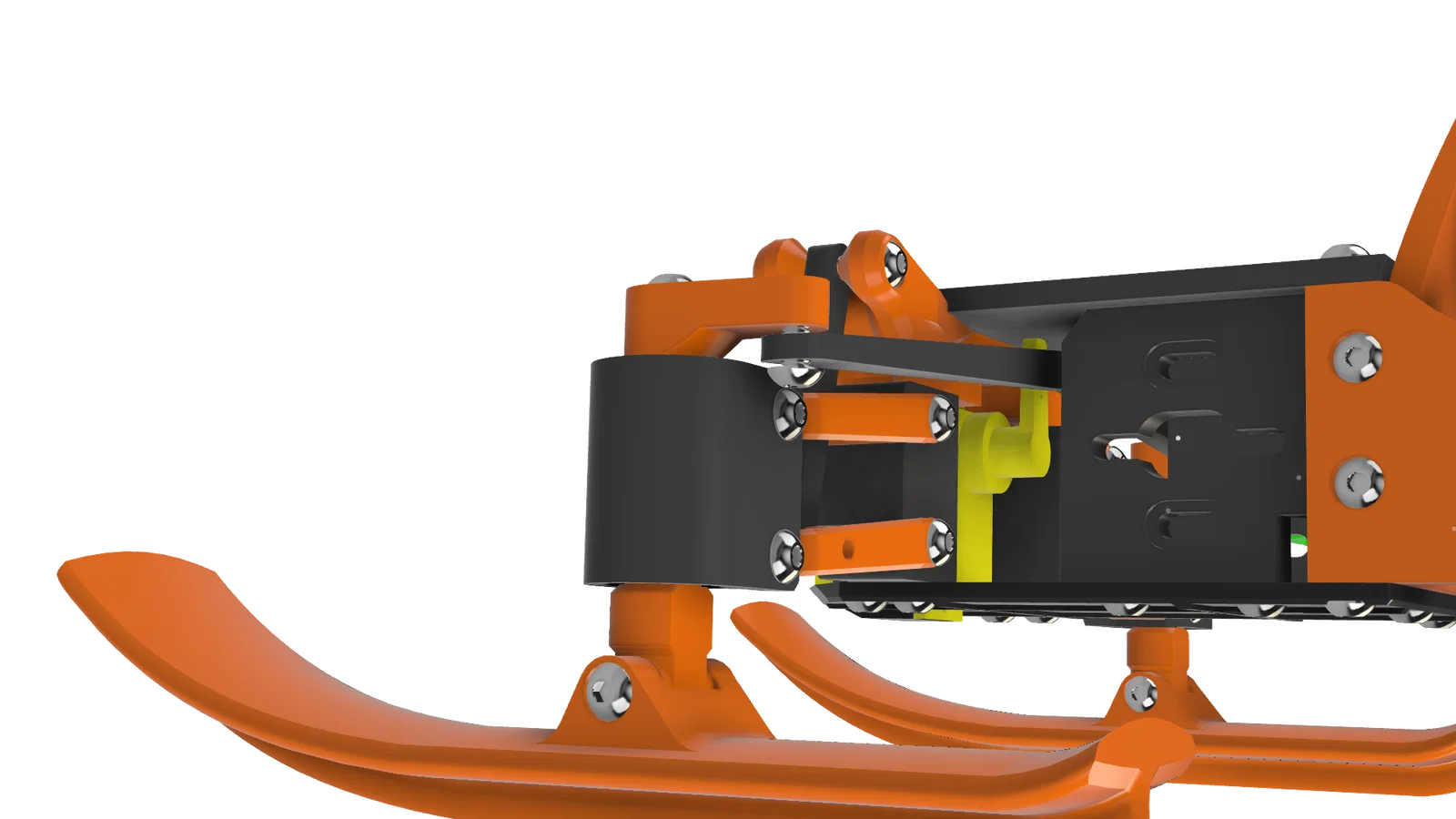
- 75x M3x8 BUTTON HEAD SCREW
- 14x BEARING MR128: 8x12x3,5 (mua 20 cái nếu bạn muốn đổi tỉ số truyền dễ hơn)
- 2x SHOCKS WPL D12 (kèm 2 con ốc M2,5 theo phuộc để bắt phần dưới) Ngoài ra bạn có thể in phuộc cứng và mua 2x M2,5x15
- SERVO EMAX ES08MAII Ngoài ra bạn có thể dùng servo kim loại size chuẩn 9g nào cũng được
- ESC 30A (mình dùng brushless ESC 30A loại rẻ nhất)
- MOTOR BRUSHLESS 2212/2200KV (mình thấy motor kv cao + tỉ số truyền phù hợp cho tốc độ và lực kéo tốt hơn) nhưng bạn có thể dùng motor nào đường kính tối đa 28mm, bắt front hoặc rear mount đều được. Mình thiết kế pinion lỗ 5mm cho 2212 outrunner hoặc lỗ 3,175mm kèm vít chặn M3 (m3 grub screw) cho inrunner. Kích thước lỗ bắt motor: 16mmx19mm
- 260g PLA (200g snowmobile + 60g cho track dạng solid)
- 60g PETG hoặc filament chịu nhiệt (cho gearing và motor mount)
- 22g TPE 85A cho track mềm (TPU 95A hoạt động kém hiệu quả hơn nhiều) Ngoài ra bạn có thể dùng track solid bằng PLA
- 1,1M dây thép 1mm cho track solid: (28x3,8cm) Ngoài ra bạn có thể dùng track mềm
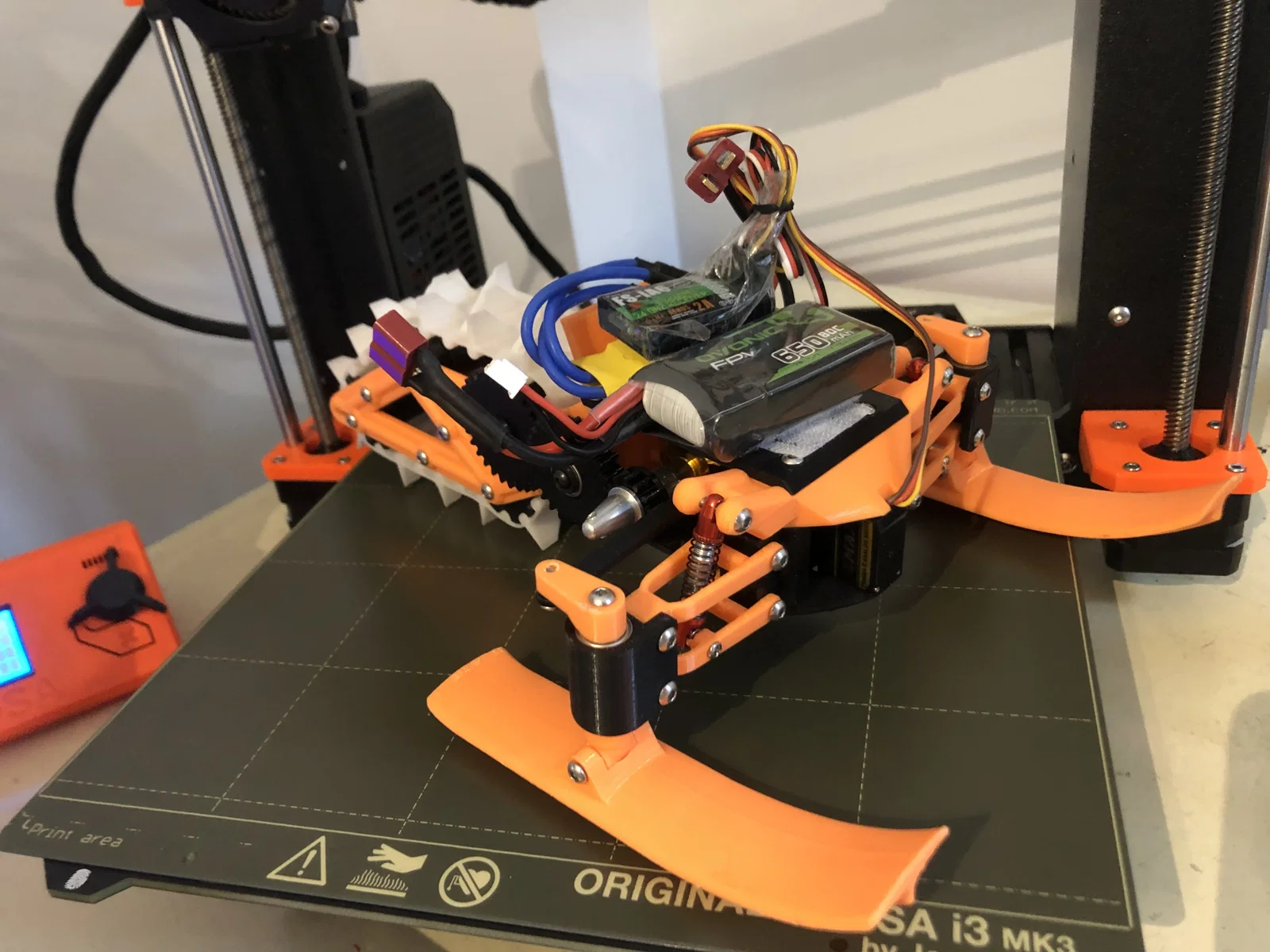
- Pin lipo 3s 650-1500mah (lipo 3s 650-800mah chạy rất ổn, cân bằng tốt giữa thời gian/trọng lượng/công suất/kích thước)
- Radio và receiver tối thiểu 2 kênh
- Velcro để gắn esc/receiver/pin
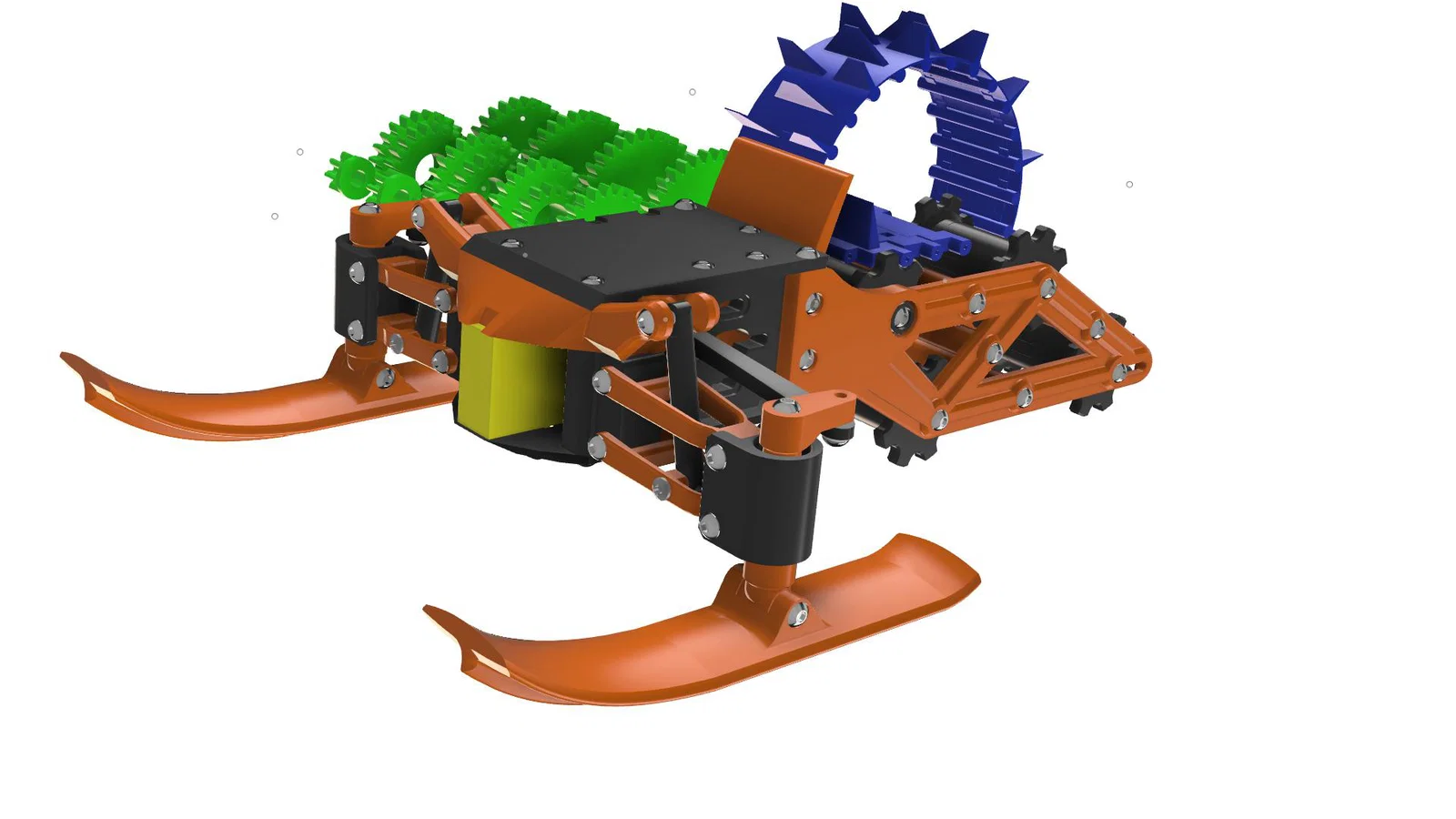
Cần support cho ski, left side plate, right side plate
STL đã được đặt đúng hướng để in
Thiết kế để in với layer height 0.2mm
Cuối tên file của mỗi part có ghi số lượng cần in (nếu nhiều hơn 1)
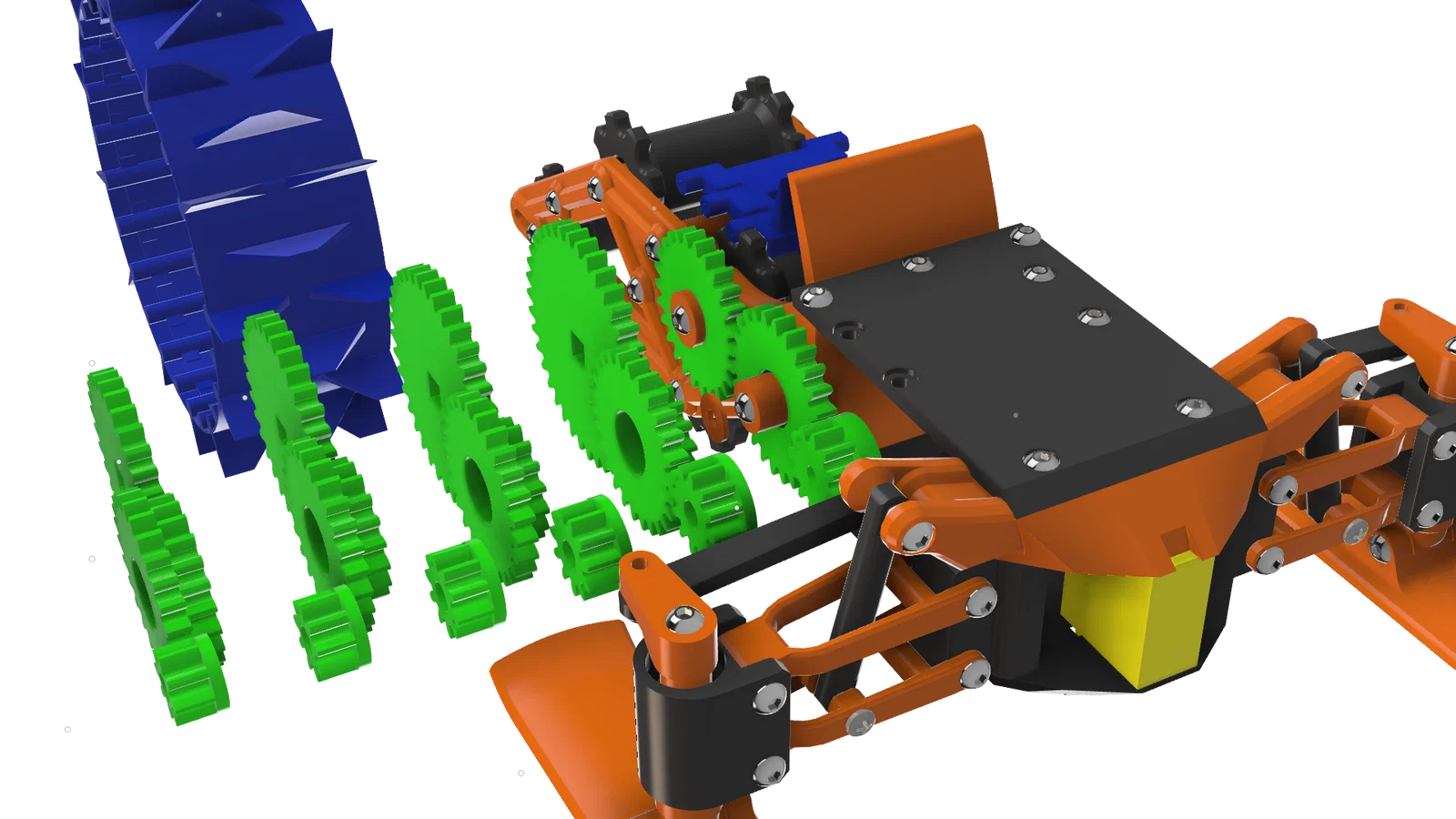
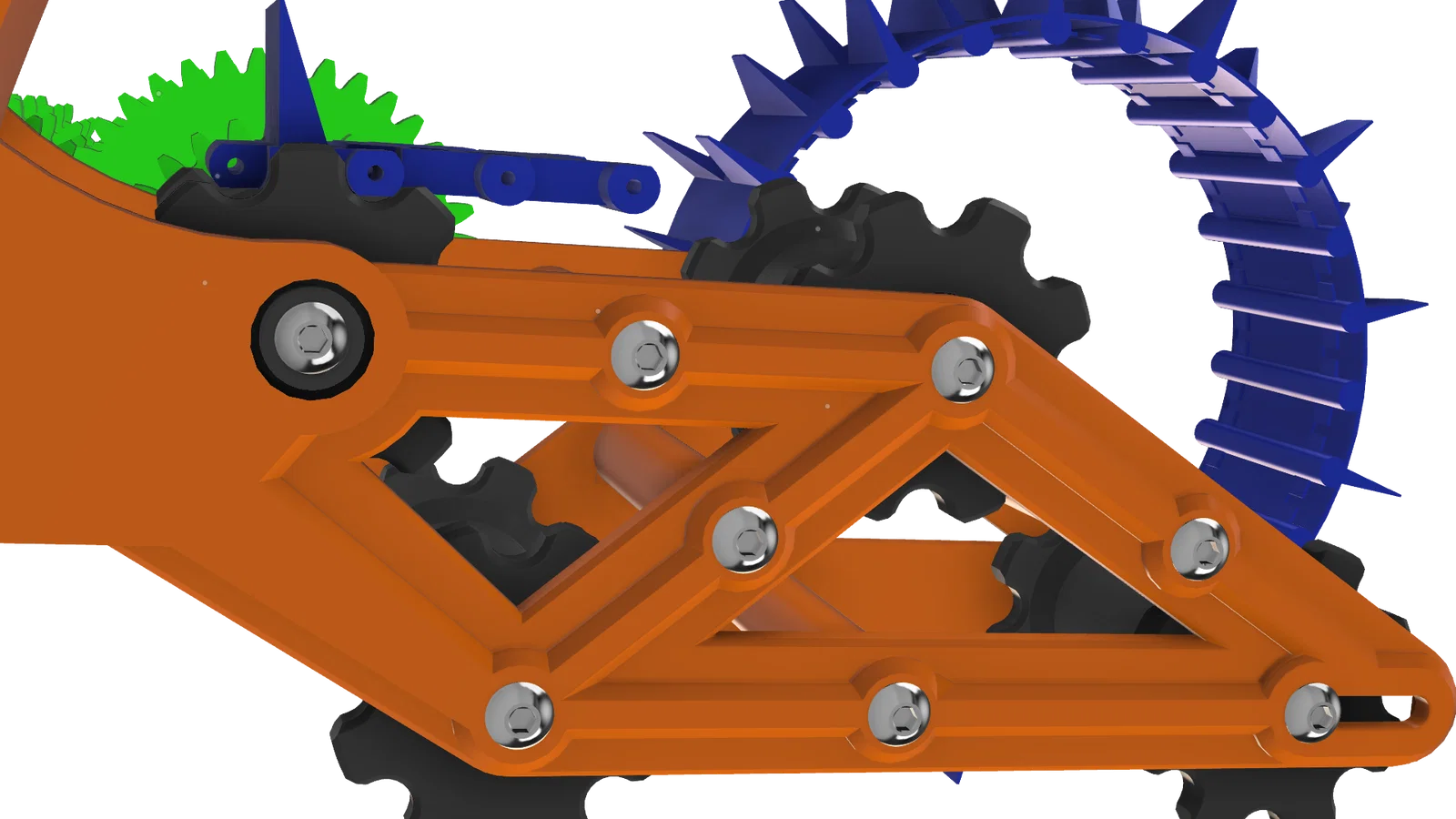
- Motor Mount và toàn bộ gearing in bằng PETG với 2 wall/100% infill/không cooling
- Track in bằng TPE 85A với 1 wall/0% infill/5 bottom/6 top layer (in chậm và đừng dùng retraction với filament này nếu bạn không có direct drive extruder)
- Drive gear part 2 in bằng PLA với 2 wall/100% infill
- Tất cả các part còn lại in bằng PLA với 3 wall/20% gyroid infill/4 bottom/6 top layer
Nếu máy in của bạn được calibration tốt, các part sẽ khớp với nhau chuẩn. Một số chỗ như vòng bi (cả trong và ngoài), spur gear và khớp servo-ski hinge là kiểu dung sai chặt (tight tolerance) nên như vậy là bình thường. Nếu lắp/tháo hơi cứng thì bạn chà nhám nhẹ chút là được. Mình test trên Prusa MK3S+ và Creality Ender 3v2.
Ở phần Upper shocks mount và arm mount, có mũi tên chỉ hướng ra phía trước để hỗ trợ lúc ráp.
Nếu bạn định dùng gearing in bằng PLA+, pinion sẽ bị chảy sau khoảng 2–3 phút chạy tốc độ cao, không nên. Mình chưa làm bể cái gear PETG nào.
Bạn cần dán (glue) idler male và female lại với nhau, hoặc bạn có thể in idler 1 phần (1 part) kèm support.
Mình dùng tỉ số truyền 3 hoặc 4,1 (G3/G4,1) với pinion 12 răng cho motor 2212/2200kv, nhưng mình đã thiết kế đủ bộ gearing cho tỉ số từ 2,1 đến 8,8. Bạn có thể tính tỉ số theo công thức → ratio=(teeth spur gear: teeth small middle gear)x(teeth big middle gear:teeth pinion gear)
Mình không dùng điện tử chống nước mà vẫn không gặp vấn đề gì với nước, kể cả khi chạy xong tuyết bám lên điện tử cỡ 2cm. Mình chỉ dùng băng keo để che các chân connector của receiver không dùng tới.
Motor và ESC luôn dưới 45° trong lúc chạy với TPE 85A và chỉ kéo khoảng 5A ở full throttle khi test đứng yên.
Bạn có thể kỳ vọng khoảng 10 phút chạy, tùy điều kiện tuyết, setup điện tử và nhiệt độ.
Mình chưa test khác biệt công suất giữa solid track và flex track, nhưng flex track rung ít hơn và chạy êm hơn: tốt hơn khi chạy tốc độ cao.
Nếu bạn dùng TPU95A cho track thì cần cắt cái cầu nhỏ giữa mỗi hình tròn, và dùng tỉ số truyền cao hơn để tránh motor bị quá nhiệt.
Thiết kế này rất bền và đáng tin cậy. Nếu bạn dùng cùng setup và print settings như mình thì gần như có thể chạy liên tục mà không phải lo bể đồ khi sử dụng. Trong suốt quá trình test, mình luôn ép snowmobile chạy hết khả năng, và phần duy nhất mình làm gãy là rod linkage do đụng mạnh trực diện phía trước. Thiết kế chịu được rất nhiều lần lật/rollover mà không bị bể.
Mình dùng Esun PLA+, Esun PETG, Esun Elastic TPE 85A.
Có kèm G-code cho
-Prusa MK3S+ với chất lượng chuẩn 0,2mm, thiết lập filament Esun PLA (standard) và prusament PETG đã chỉnh (245° khi in, không cooling và retract 0,8mm). Profile TPE cũng chỉnh rất nhiều (nới lỏng ốc idler tối đa có thể).
-Creality Ender 3V2 với chất lượng 0,2mm, thiết lập filament Prusament PLA (chỉnh giảm tốc) và Generic PETG (chỉnh giảm tốc), profile TPU track không dùng retraction.
Nếu bạn có ý tưởng nào để cải thiện thiết kế này thì nhắn mình, hoặc dùng file STEP.
i Inclued Step file với bản V1 Tinyrider đã nâng cấp của mình.
Arctic Tinyrider V2 sắp ra mắt.
Giấy phép

File mô hình













































































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!