Khớp nối đa năng dựa trên servo 9G

Tôi đã thiết kế khớp phổ quát này từ đầu, với ý tưởng sử dụng nó ở khớp vai/hông của một con chó robot, tôi












Mô tả
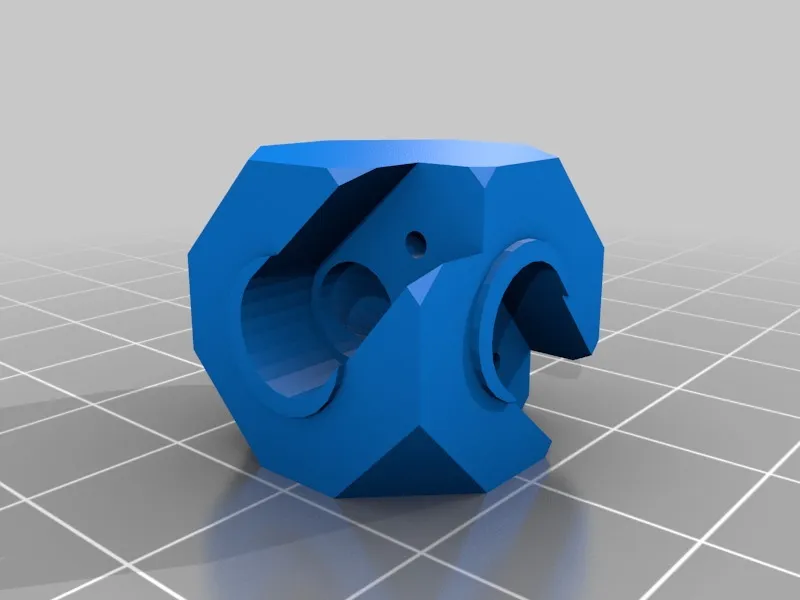
Tôi đã thiết kế khớp nối này từ đầu, với ý tưởng sử dụng nó trong các khớp vai/hông của một con chó robot mà tôi đang làm việc. (Tôi hy vọng sẽ tải lên điều đó sớm thôi).
Động lực chính của tôi là có được một khớp nối đa năng với hai DoF ở một chỗ, vì đó là những gì mà chúng ta, động vật có vú, có ở vai và hông.
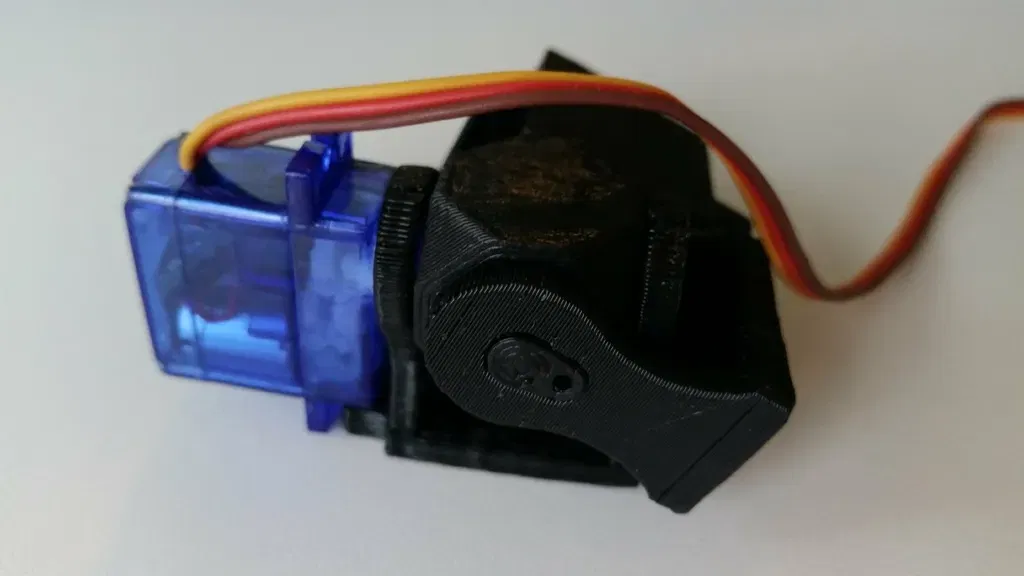
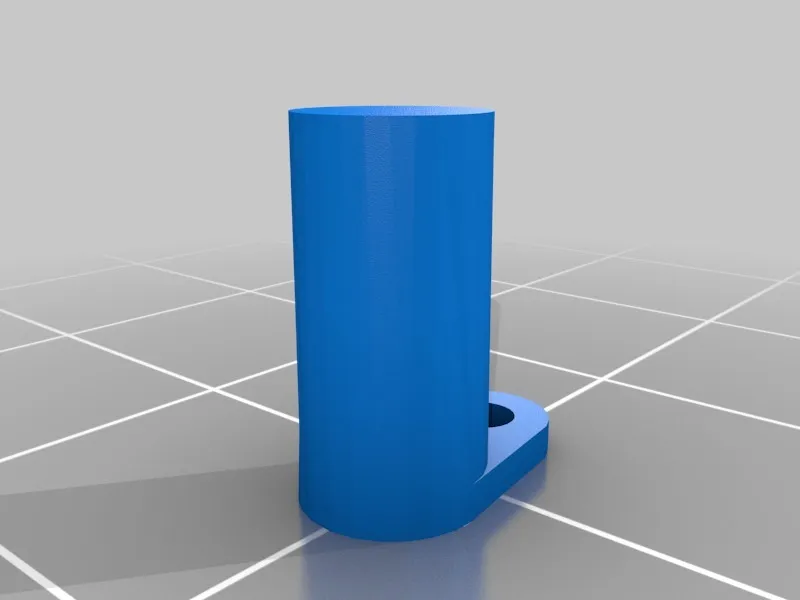
Bạn sẽ thấy các bước thiết kế mà tôi đã trải qua để đến nơi tôi đang ở bây giờ. Nó được thiết kế để phù hợp với các Tower Pro 9g micro servos
Tôi biết chất lượng in không phải là tốt nhất, xin lỗi vì điều đó. Các bộ phận được in bằng nhựa rẻ (trông có vẻ không bao giờ hết!)
Tôi sẽ tải lên những bức ảnh mới ngay khi tôi in bằng một loại PLA khác (tốt hơn).
Cài đặt in
Hỗ trợ:
Không
Ghi chú:
Giấy phép

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!