Nền tảng robot linh hoạt dùng bánh Mecanum

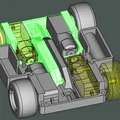
Thiết kế platform robot dùng bánh Mecanum (omni wheel) với chassis chia 2 nửa nối bằng bản lề trung tâm, cho phép xoắn ±10° để leo khoảng 1 cm mà vẫn giữ đủ 4 bánh luôn bám mặt đất.










Mô tả
Đây là thiết kế của mình cho một robot platform dùng bánh Mecanum (omni wheel).
Trong lúc thử nghiệm với một con bot thương mại cỡ lớn hơn, tụi mình nhận ra là platform bánh Mecanum cần đảm bảo cả 4 bánh lúc nào cũng phải bám chắc xuống mặt đất.
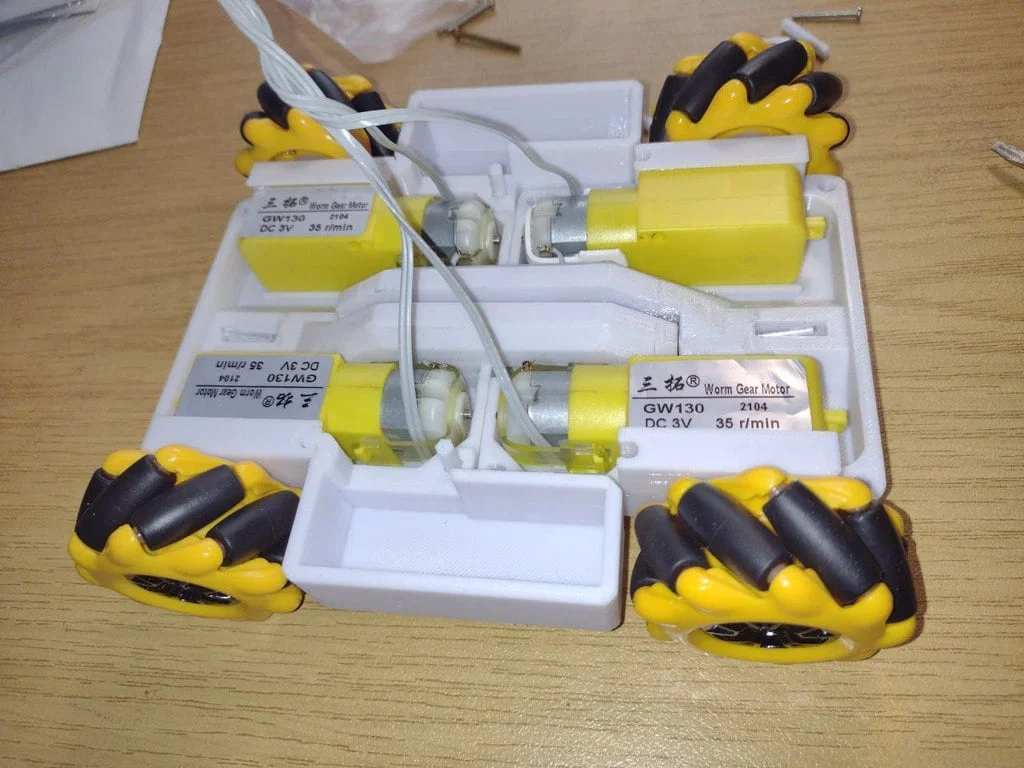
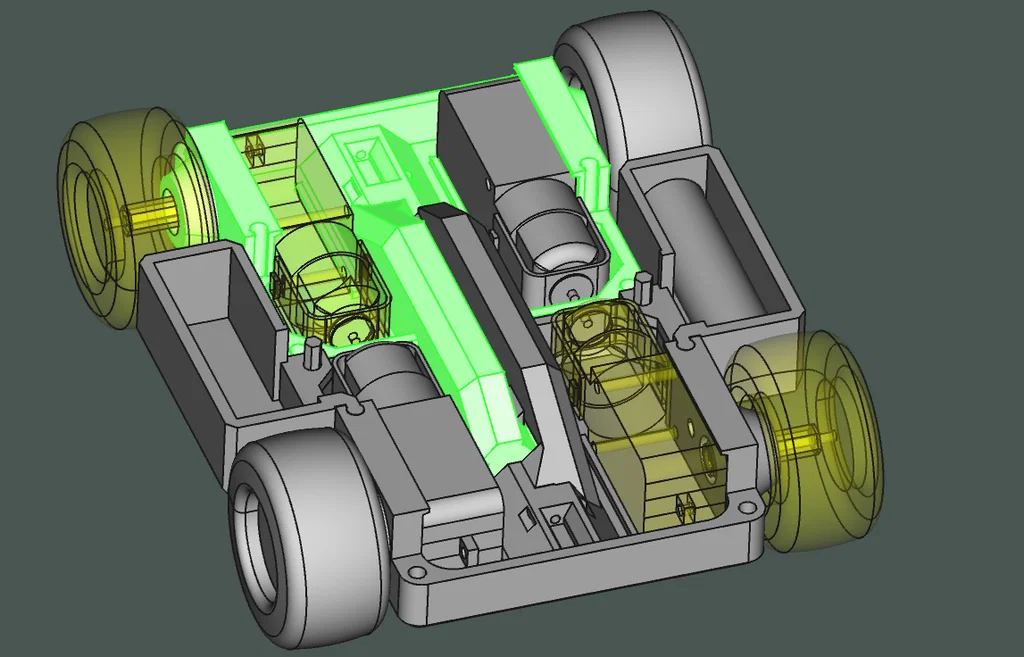
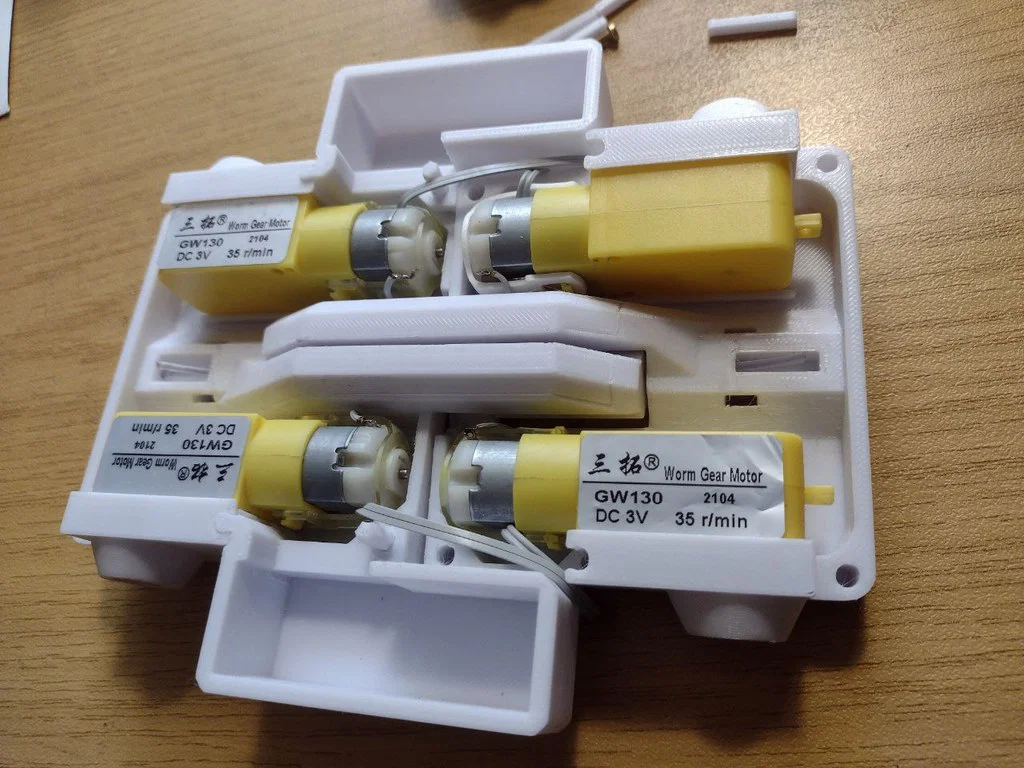
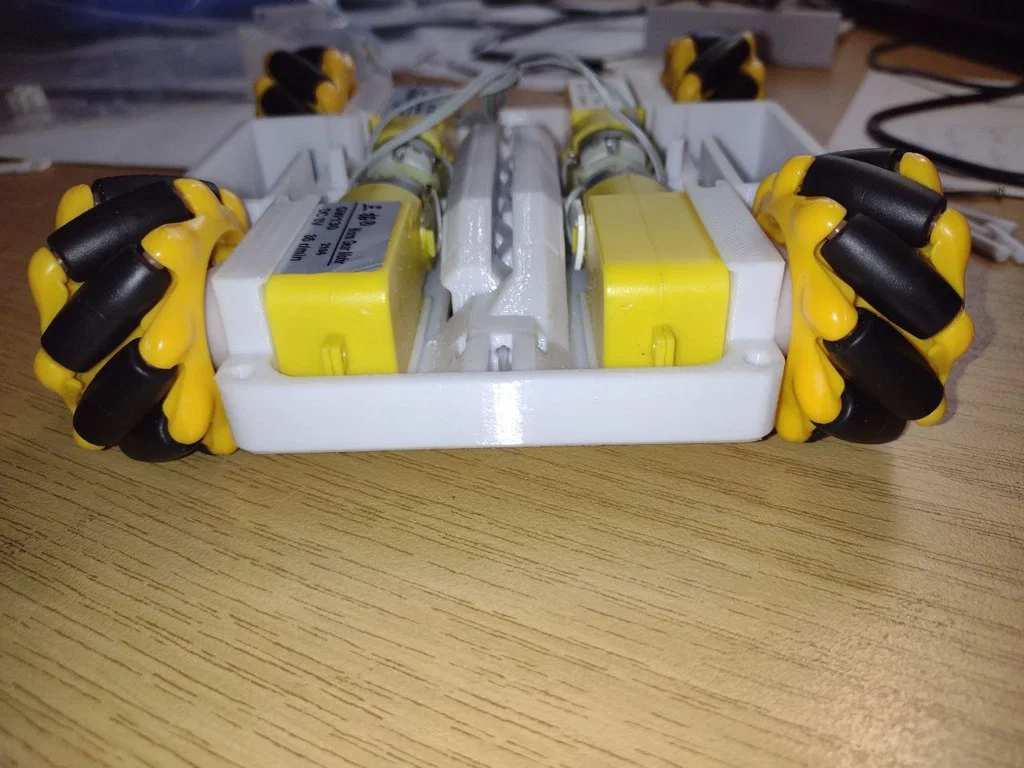
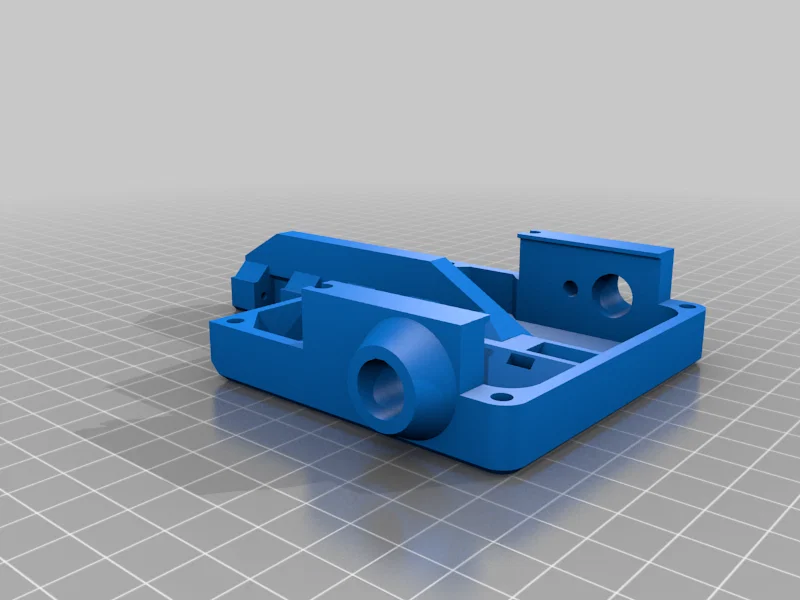
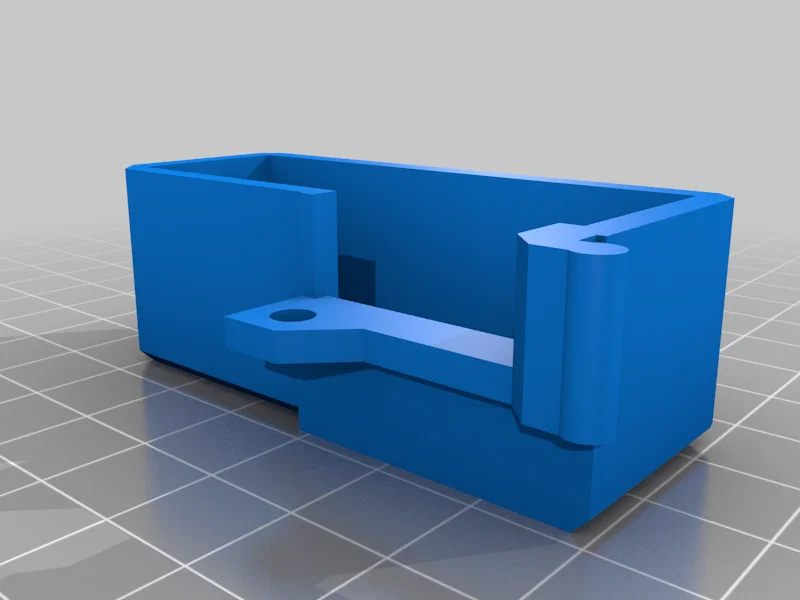
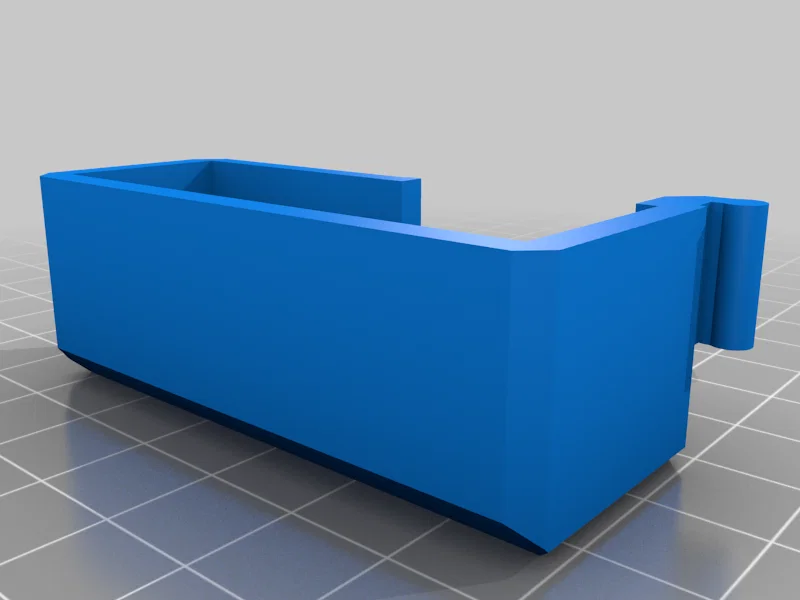
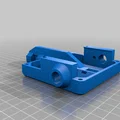
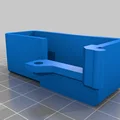
Thiết kế này giải quyết vấn đề bằng cách chia chassis ra làm 2 phần (giống hệt nhau), rồi nối với nhau bằng một cái hinge ở giữa.
Chassis được thiết kế để có thể vặn (twist) tối đa 10 độ theo mỗi hướng. Nhờ vậy có thể leo cao khoảng 1 cm mà không bao giờ làm nhấc một bánh nào khỏi mặt đất.
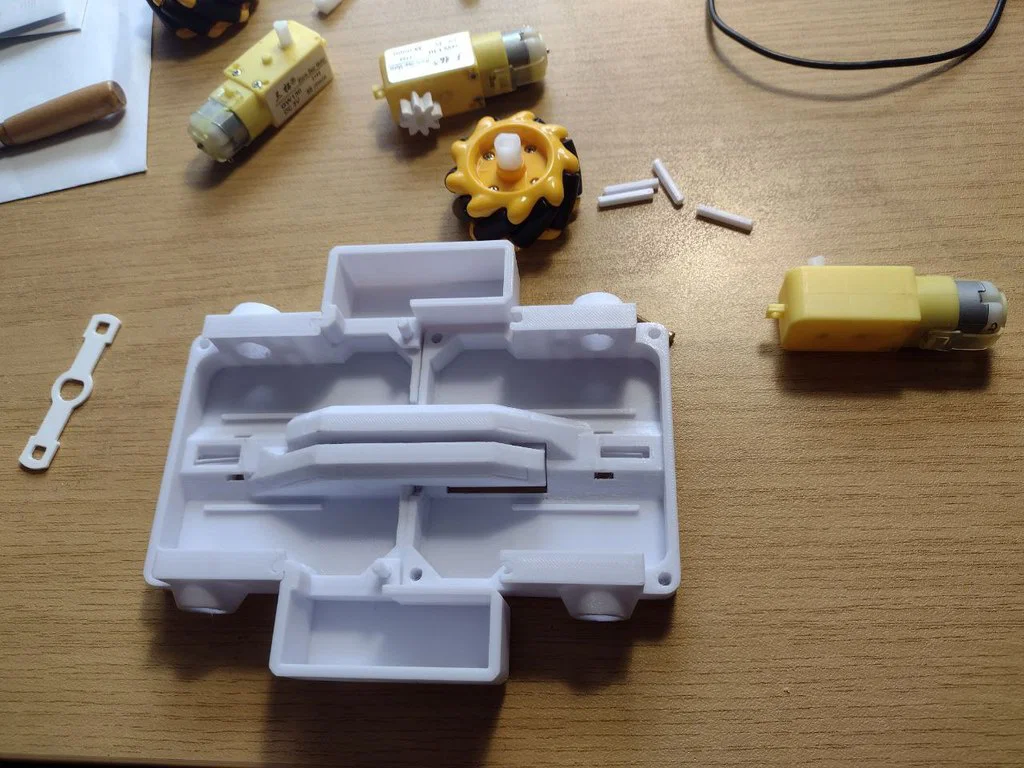
Các phần không in được:
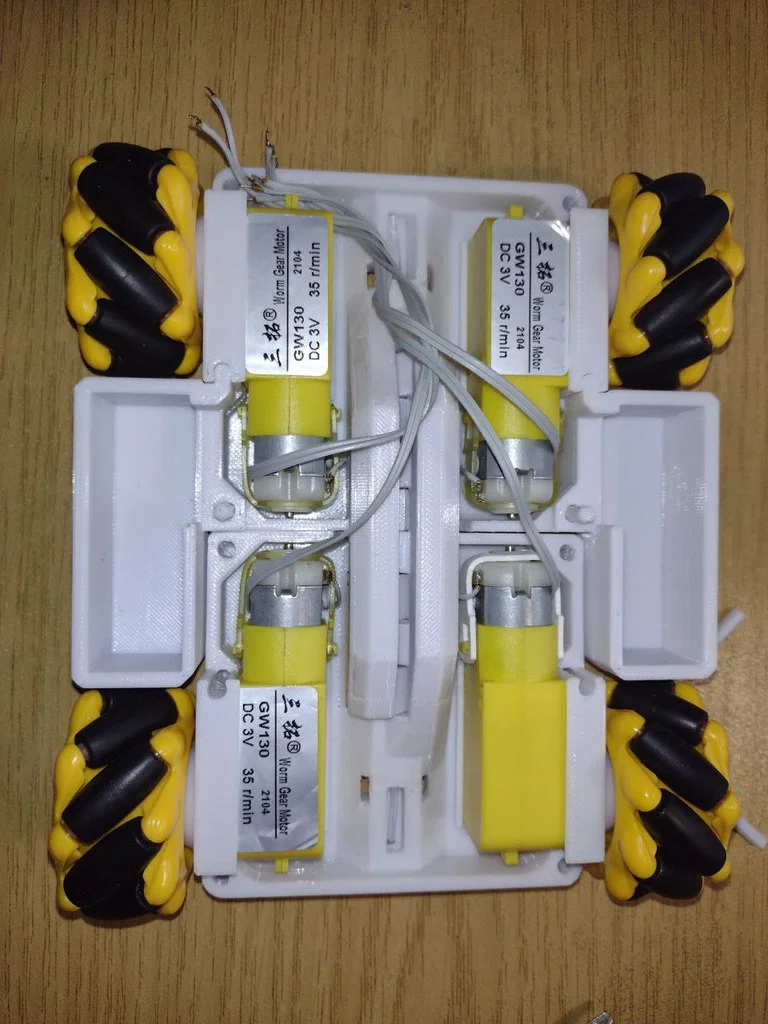
- 4 motor loại TT (TT-type) còn gọi là GW-130. (Chỉ cần bấm cái là vô khớp, không cần ốc)
- hai cặp bánh mecanum 48mm, ví dụ: https://de.aliexpress.com/item/1005005651980933.html
Bánh xe có kèm trục, vừa khít với hộp số (gearbox) của motor GW-130.
Tải trên chassis được truyền xuống bánh chủ yếu thông qua một gờ trụ (cylindrical protrusion) quanh trục. (Toàn bộ gearbox là nhựa nên mình không tin nó chịu nổi tải uốn)
Driver motor dự tính là một board quad dùng H-bridge L9110S.
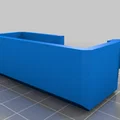
Khoang bên trái và bên phải có không gian bên trong 18mm x 60mm. Vừa đẹp để mỗi bên chứa một cell Li-Ion 18500.
Danh mục: Robotics
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình






Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!