Bộ Ngón Kẹp (Gripper Fingers) cho Robot Franka Emika Panda

Bạn đang tìm kiếm phụ kiện thay thế cho cánh tay robot Franka Emika Panda? Bộ thiết kế ngón kẹp (gripper fingers) này mang đến sự linh hoạt tuyệt vời cho hệ thống robot của bạn. Với hai phiên bản ngón dài và ngắn được thiết kế tỉ mỉ, bạn có thể dễ dàng in 3D để thay đổi công cụ gắp phù hợp với nhiều loại vật thể khác nhau. Đây là giải pháp tiết kiệm và hiệu quả để tối ưu hóa quy trình tự động hóa, giúp robot vận hành chính xác và ổn định hơn trong các thao tác gắp giữ phức tạp. Bản thiết kế đi kèm các thông số kỹ thuật rõ ràng về kích thước và lỗ vít, hỗ trợ bạn in ấn chuẩn xác và lắp đặt nhanh chóng, giúp công việc của bạn không bị gián đoạn.



Mô tả
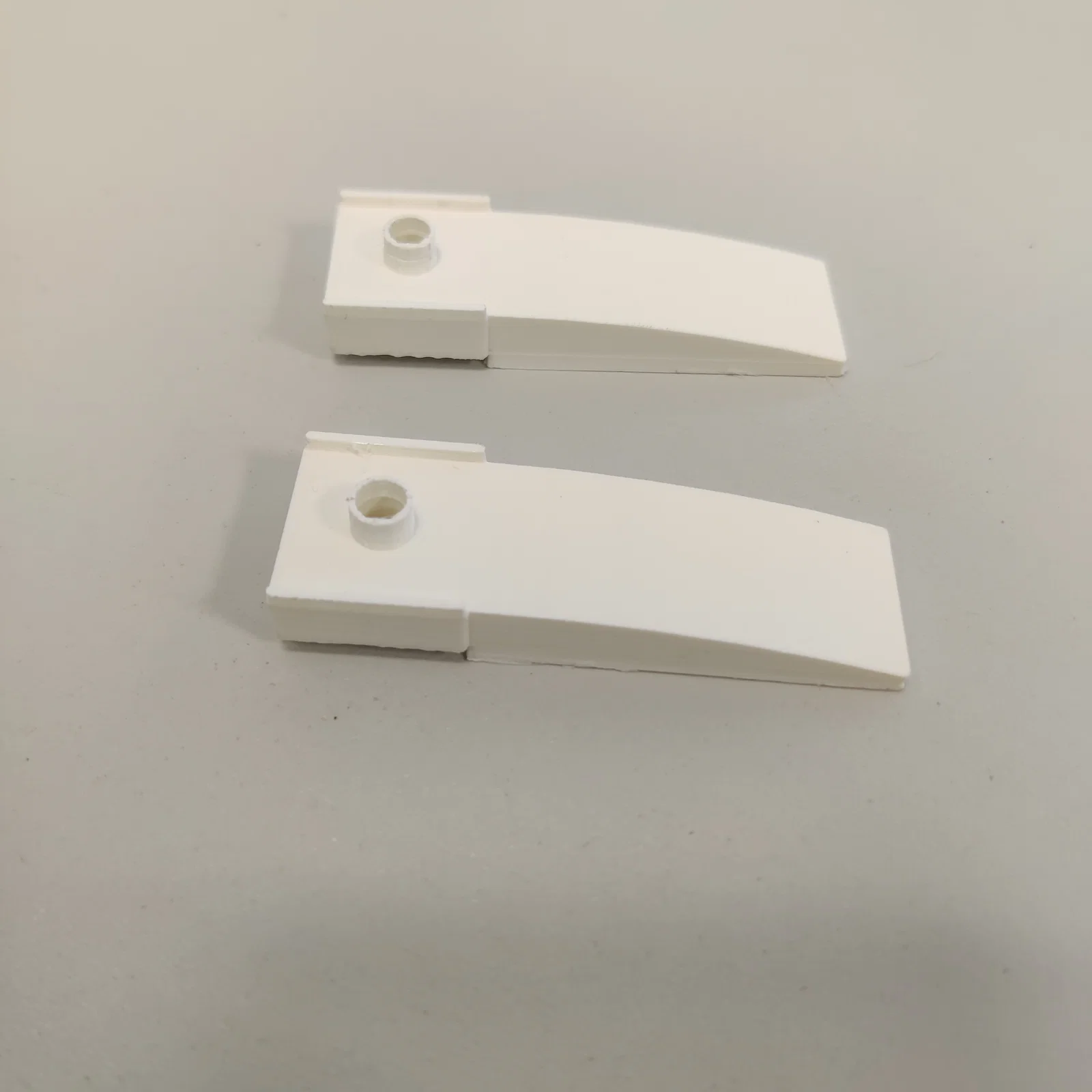
Ngón tay kẹp (Gripper Fingers) cho robot Franka Emika Panda
Bạn đang sử dụng cánh tay robot Franka Emika Panda và cần thay thế hoặc tùy chỉnh các ngón tay kẹp để phù hợp với từng nhu cầu công việc cụ thể? Bộ thiết kế này cung cấp giải pháp linh hoạt với hai phiên bản: ngón ngắn và ngón dài, được tối ưu hóa để gắn trực tiếp vào cơ cấu kẹp của robot Panda. Việc tự in 3D các phụ kiện này giúp bạn chủ động hơn trong việc thay đổi công cụ, tiết kiệm chi phí so với việc mua phụ tùng gốc mà vẫn đảm bảo độ chính xác cần thiết cho các thao tác gắp giữ.
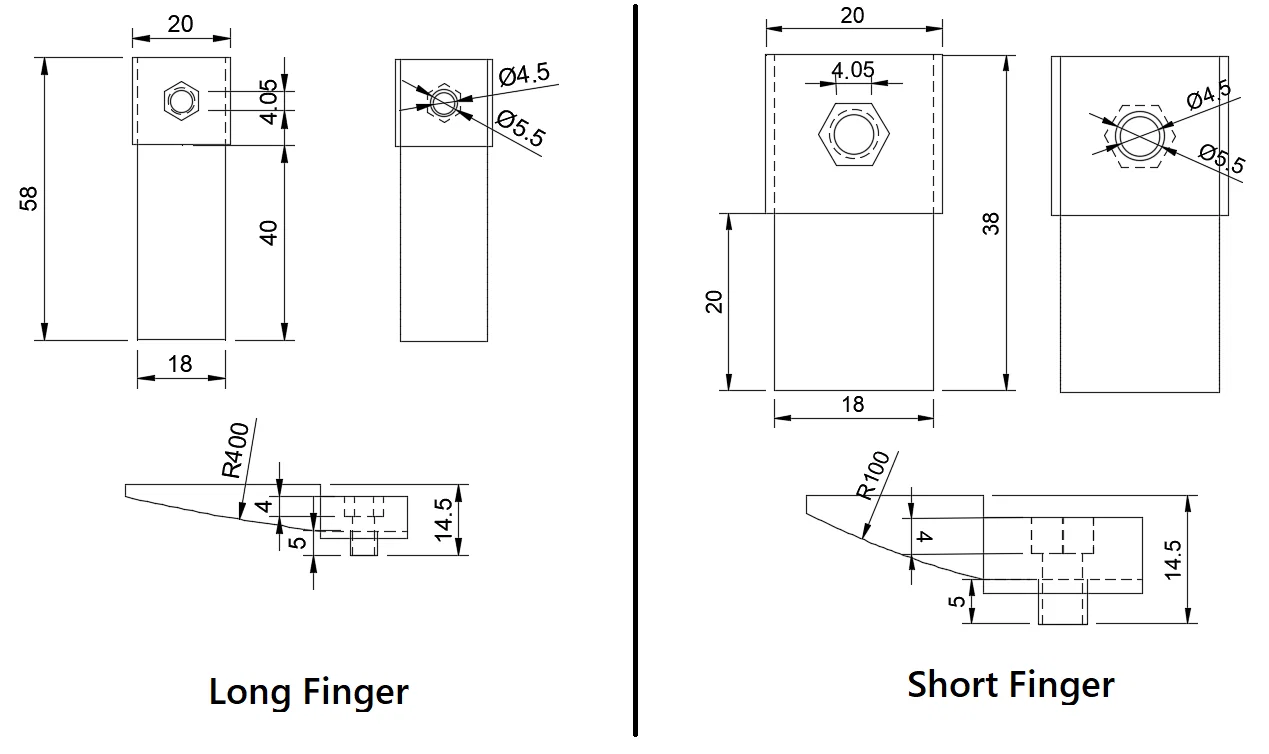
Các file STL này đã được thiết kế kỹ lưỡng dựa trên thông số kỹ thuật chuẩn, cho phép bạn lắp ráp nhanh chóng vào bộ phận kẹp. Tùy thuộc vào hình dáng và kích thước của vật thể mà robot cần thao tác, bạn có thể lựa chọn in phiên bản ngắn (với độ cong R100) hoặc phiên bản dài (với độ cong R400). Sự linh hoạt này giúp robot của bạn xử lý các tình huống gắp vật thể khác nhau một cách hiệu quả và ổn định hơn, giảm thiểu tình trạng trượt hoặc hư hại bề mặt sản phẩm.
- Linh hoạt kích thước: Cung cấp hai tùy chọn gồm loại ngón dài (58mm) và ngón ngắn (38mm) để thích nghi với đa dạng hình dạng vật thể.
- Thông số chính xác: Thiết kế dựa trên tiêu chuẩn kỹ thuật với lỗ bắt vít 4.5mm và 5.5mm, đảm bảo khớp nối chắc chắn với cơ cấu robot.
- Dễ dàng sản xuất: File in 3D tối ưu cho phép bạn chủ động sản xuất ngay tại xưởng mà không cần đợi nhập khẩu linh kiện.
- Lời khuyên về in 3D: Nên sử dụng nhựa có độ bền cơ học cao như PETG hoặc ABS để đảm bảo ngón kẹp không bị biến dạng dưới áp lực gắp. Nếu dùng PLA, hãy in với độ dày vỏ (wall count) cao và mật độ lấp đầy (infill) trên 40%.
- Lưu ý kỹ thuật: Chú ý các thông số như lỗ bắt vít và kích thước chân đế trên bản vẽ kỹ thuật đi kèm để đảm bảo độ chính xác tuyệt đối khi lắp ráp vào robot Franka Emika Panda.
- Tối ưu bề mặt: Cân nhắc in với layer height thấp (0.12mm - 0.16mm) để bề mặt tiếp xúc với vật thể có độ bám tốt nhất, hoặc có thể dán thêm lớp đệm cao su mỏng nếu cần độ ma sát cao hơn.
Việc tự chủ trong việc sản xuất phụ kiện cho robot Franka Emika Panda không chỉ là cách để tối ưu hóa quy trình làm việc mà còn là giải pháp thông minh giúp đội ngũ kỹ thuật phản ứng nhanh với những thay đổi trong sản xuất. Với bộ ngón kẹp này, robot của bạn sẽ luôn sẵn sàng cho mọi nhiệm vụ mới.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!