XRP Mecanum Drive / Omnidirectional (in full 3D, 2 loại frame)

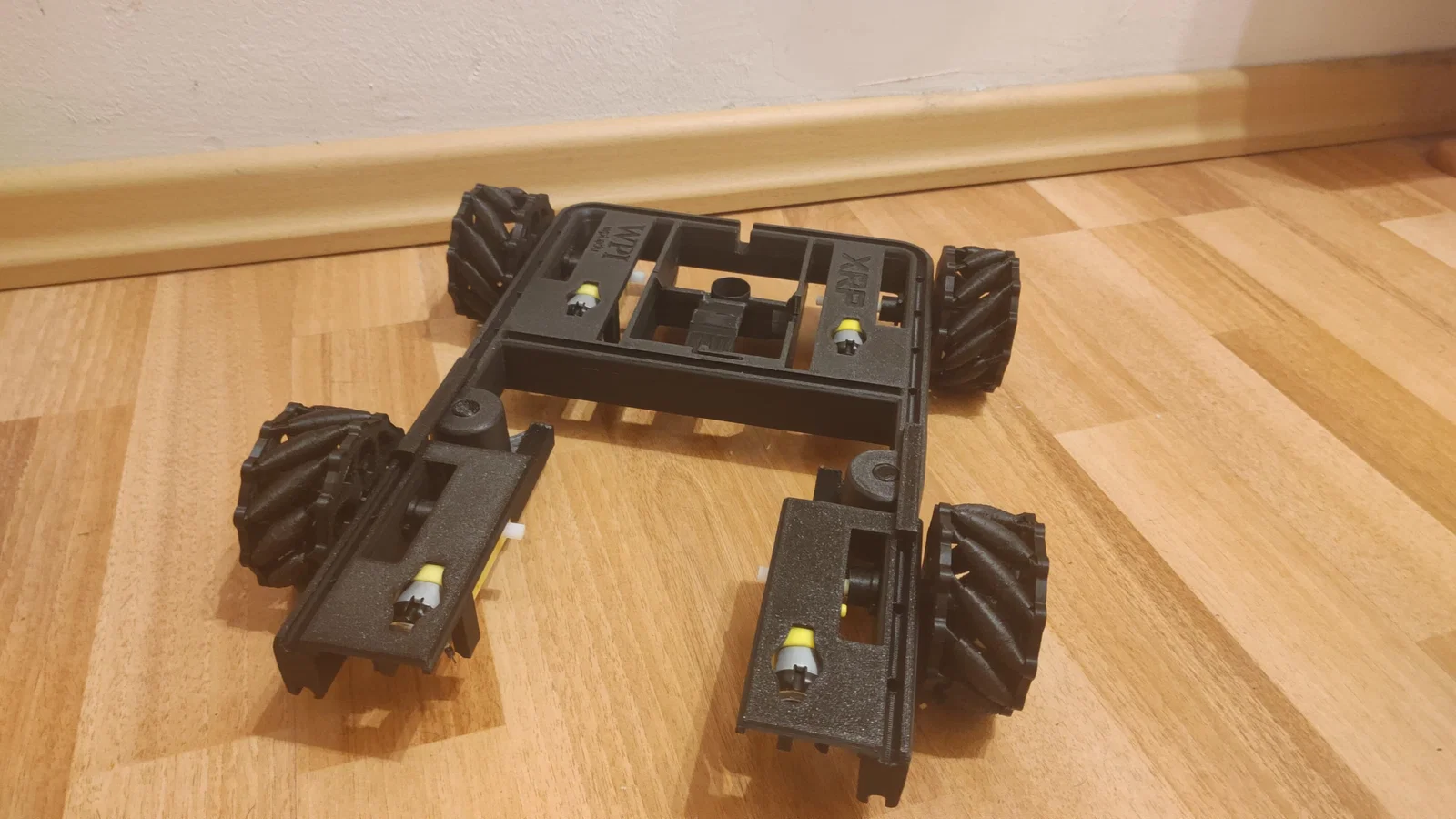
Bộ mecanum drive in 3D hoàn toàn cho XRP, phù hợp chạy trong nhà và không gian nhỏ. Gồm 2 lựa chọn frame (Big Boy hoặc Mecanum), có thể dùng 2WD/4WD. Cần chassis V1.5.3MF và tổng cộng 4 motor.









Mô tả

Đây là bộ mecanum drive in 3D hoàn toàn cho XRP của bạn, cực hợp để chạy trong nhà và không gian nhỏ. Còn nếu muốn chạy ngoài trời thì mình khuyên bạn coi vài bản mod khác của mình như , hoặc nếu muốn xuống nước thì .
Mod mecanum cho XRP về cơ bản sẽ biến XRP của bạn thành 4x4, nghĩa là bạn cũng có thể dùng chassis XRP Big Boy nếu muốn xe to hơn. Dù sao thì hệ mecanum bắt buộc phải có 4 motor nha!

Cũng đáng lưu ý là bộ kit này cần latest chassis hiện đang là V1.5.3MF. Bản này có thêm một cái lỗ cạnh trục motor, để bạn gắn bánh ở ngoài khung.
Với các phiên bản cũ hơn, bạn sẽ phải chỉnh/sửa chassis. Mình có cung cấp để giúp bạn khoan lỗ đúng vị trí, coi thêm các model của mình tại đây.
Danh sách in (Print List):
- 48x Rollers (khuyến nghị TPU)
- 4x A-Rim Parts
- 4x B-Rim Parts
- 4x Axis
- 8x Axis Safety Ring
Phần bổ sung (Additional parts)
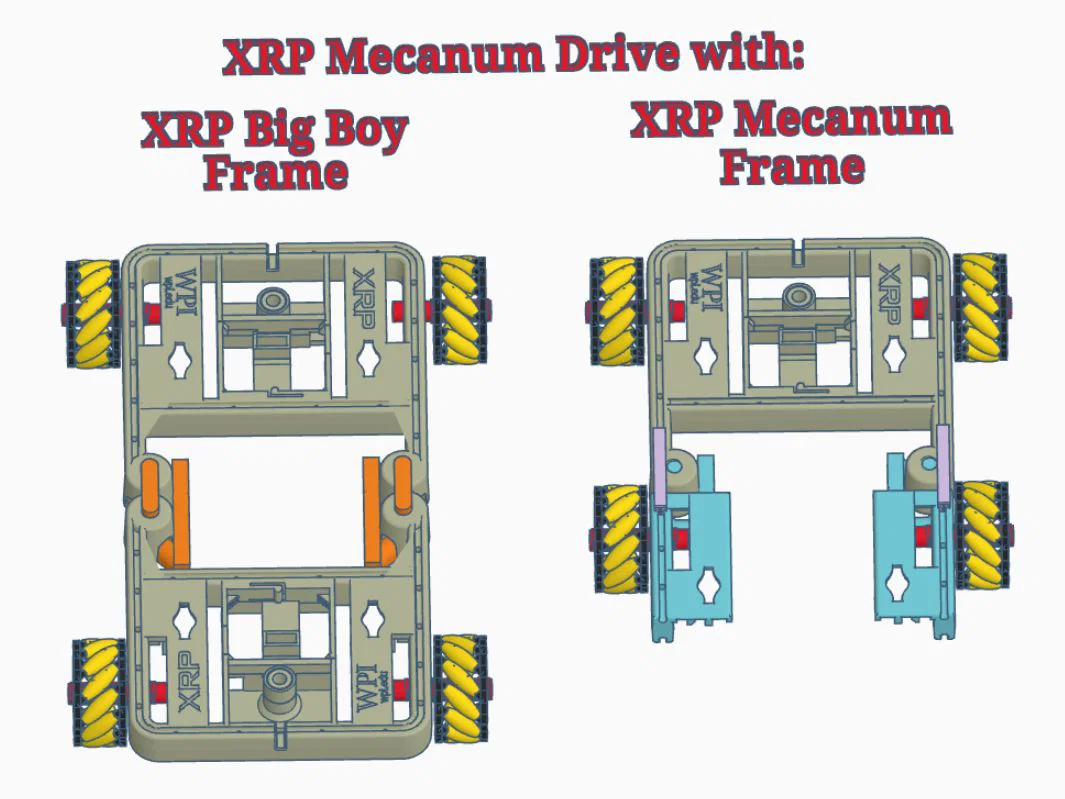
Giờ bạn cần quyết định: dùng Big Boy frame hay Mecanum Frame.
Big Boy Frame
- 1 khung XRP Frame bổ sung
- 2x Big Boy Bottom Plate
- 2x Big Boy Safety Ring
Mecanum Frame
Mecanum Frame có 2 phiên bản khác nhau. Cuối cùng thì gần như giống nhau. Một bản cần support khi in; do tư thế in nên nó không thể có “push buttons” ở chỗ gắn caster mount. Bản còn lại in 2 phần không cần support nhưng phải lắp ráp. Khi lắp ráp mình khuyên dùng keo hoặc mỏ hàn (soldering iron). Bản này có “push buttons” phía trên caster mount để tháo ra dễ hơn.
- Bản 1 phần
- 1x Left Front System
- 1x Right Front System
- Bản 2 phần
- 1x Left Front System Caster Mount Part
- 1x Left Front System Motor Mount
- 1x Right Front System Caster Mount Part
- 1x Right Front System Motor Mount
Ngoài ra cần có (Additionally Required):
- 2x Motor bổ sung ROB-24053
- Không cần controller thêm, board của bạn xử lý được 4 motor
Cài đặt in (Print Settings)
Với các chi tiết quay cần ma sát thấp như axis hoặc rollers, mình khuyên bạn đặt seam position là random để giảm ma sát do “gờ” tạo ra khi seam bị canh thẳng hàng, hoặc cố gắng tối thiểu seam.
Riêng rollers, mình khuyên dùng TPU để bám mặt sàn tốt hơn và infill octagram spiral để phân bố infill đều, giúp phân bố lực/áp tốt hơn. Nhưng bạn cũng có thể in bằng bất kỳ filament cứng nào bạn thích. Seam random sẽ giảm ma sát bên trong và tạo chút “profile” cho lốp bên ngoài. Bạn còn có thể tăng nữa bằng fuzzy skin, nhưng đừng bật cho phần lỗ, vì sẽ làm tăng ma sát rất mạnh và có thể khiến mecanum drive không chạy được. Nhớ đảm bảo vẫn còn đủ khe hở (clearance) giữa các rollers.
Như nói ở trên, phần in 1 khối của Mecanum drive tiếc là sẽ cần support. Tuy nhiên mình khuyên bạn tắt support ở vùng được highlight màu đỏ, vì phần đó máy nào cũng in ổn. Về tốc độ và lượng vật liệu dùng, mình dùng normal snug.

Những phần còn lại có thể in không cần support. Với các rim parts, mình khuyên giảm tốc máy khi in roller axis, bạn sẽ muốn cái axis có chất lượng cao. Mình cũng khuyên dùng print by object cho rollers.
Nhưng mà máy bạn bạn rành nhất.
Mecanum Wheel
2 motor bổ sung là bắt buộc để chạy mecanum drive. Mình khuyên bạn đọc bài wikipedia, đặc biệt khi lập trình raspberry pi pico thì cần hiểu việc quay bánh sẽ ảnh hưởng chuyển động xe như thế nào. Vài ví dụ:

Mũi tên xanh chỉ chiều quay của bánh, còn mũi tên đỏ chỉ hướng chuyển động của xe. Cái này sẽ giúp bạn hình dung tổng quan để suy ra các tổ hợp khác. Mình cũng đính kèm một bảng chi tiết hơn ở cuối tài liệu này.
Lắp ráp Mecanum Wheel (Mecanum Wheel Assembly)
Tạm thời cứ để mấy mũi tên chỉ thị nhỏ (indicator arrows) trên rims.
Bạn luôn phải lấy 2 cái rim cùng loại, sao cho các roller axis đều hướng cùng một phía. Bắt đầu gắn rollers vào một cái rim. Đảm bảo chúng quay trơn. Nếu không, thử xoay qua lại cả hai chiều để giảm ma sát. Nếu vẫn không ổn, tháo roller ra và kiểm tra roller axis và lỗ roller xem có lỗi gì không.
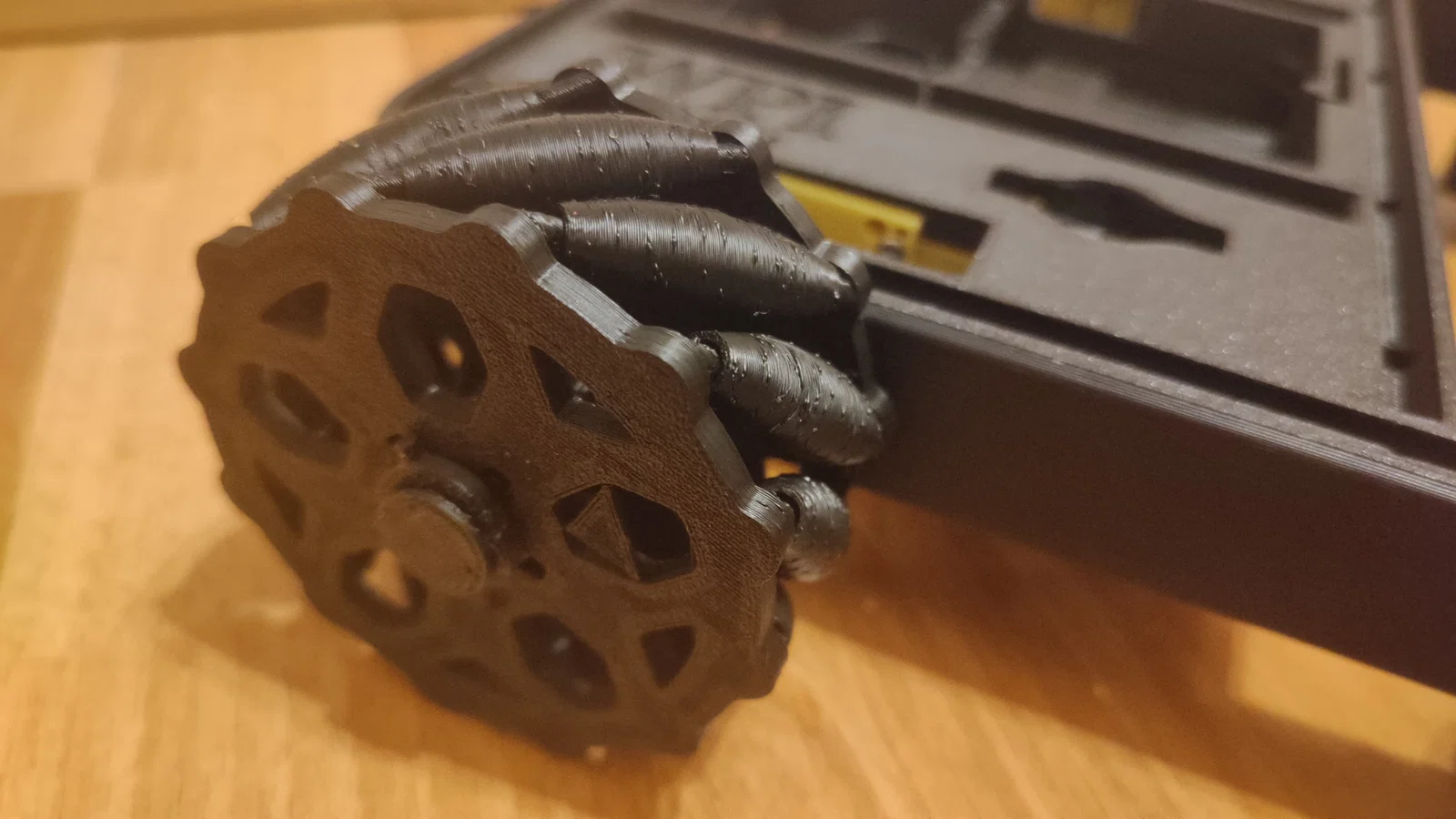
Khi gắn xong tất cả rollers lên một rim, đặt rim thứ hai lên trên và nhìn xuyên qua rim. Mũi tên chỉ thị phải lệch sang trái 1 nấc hoặc lệch sang phải 1 nấc.

Sau đó xoay rim phía trên ngược lại với hướng của roller axis. Trong ảnh chụp màn hình là xoay theo chiều kim đồng hồ. Khi một roller thẳng hàng với roller axis của rim trên, bắt đầu ép rim trên nhập vào các rollers. Tất cả axis phải chui vào rollers trước thì bạn mới ép khít 2 rim lại được. Khi mọi axis đã vào trong rollers thì không cần dùng nhiều lực. Cứ xoay bánh, nếu thấy axis nào chưa vào roller thì nhẹ nhàng xoay ngược lại, đẩy axis xuyên qua roller rồi tiếp tục. Loay hoay chút là mọi thứ sẽ thẳng hàng và bạn có thể nhẹ nhàng đóng khít rim. Nếu căn đúng, dấu hoa thị (asterisk) trên và dưới cũng sẽ thẳng hàng, lúc đó bạn có thể đẩy axis xuyên qua cả 2 phần rim. Kéo/đẩy 2 rim tách nhẹ ra cho tới khi axis xuyên qua.

Dùng safety ring để khóa phía dưới, tránh bánh bị tuột ra. Đảm bảo bạn gắn safety ring ở đúng mép ngoài, chỗ mà bên trong axis không có phần mount của trục motor. Giờ bạn có thể tháo mũi tên chỉ thị ra.
Sẽ có một chút lắc lư, nhưng trục motor sẽ giữ mọi thứ đúng vị trí nên nó không bị tách ra được.
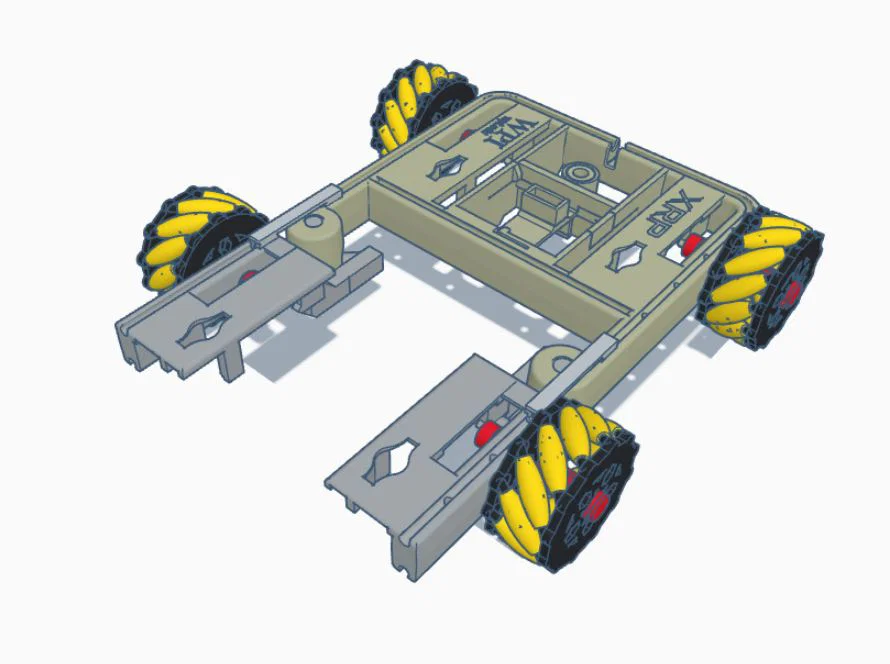
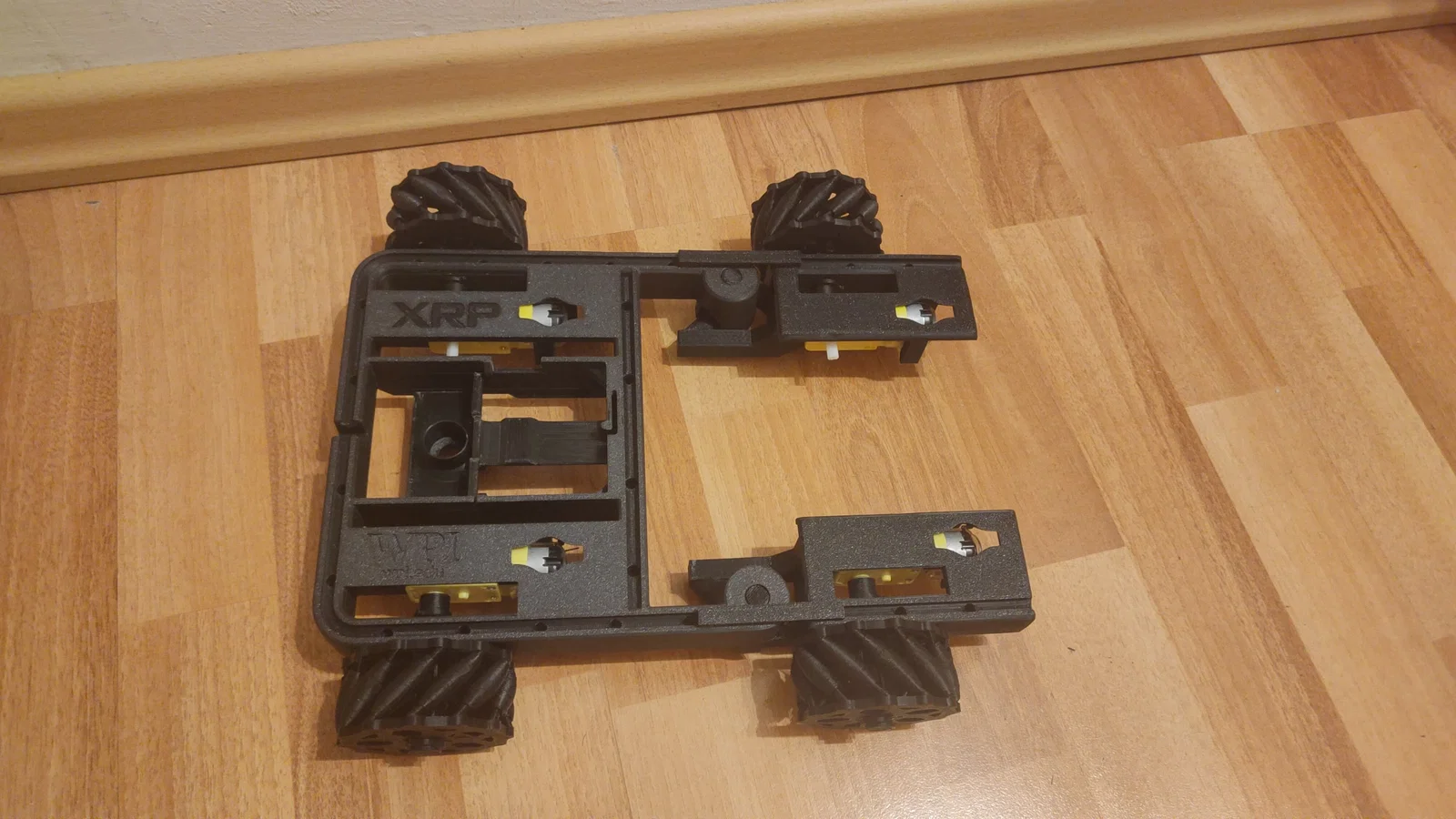
Gắn Mecanum Wheels (Mount the Mecanum Wheels)
Với 2 bánh trước, bạn cần lắp các front systems trước. Bạn có thể tùy chọn dùng rail connector để liên kết chắc hơn.

Nếu bạn chọn XRP Big Boy Frame, chỉ cần nối 2 chassis bằng bottom plates rồi đến safety ring (hoặc làm ngược lại cũng được), không có gì dễ sai lắm.
Lắp 2 motor bổ sung.
Sau đó đặt tất cả bánh cạnh các motor và nhìn từ trên xuống như trong hình. Các rollers phải hướng vào tâm chassis tạo thành chữ X. Xoay bánh tới khi mọi thứ đúng vị trí. Rồi luồn axis qua lỗ trục motor và gắn lên motor. Khóa axis lại bằng một safety ring nữa.

Chuyển động cơ bản (Basic Movement)
Bảng này chỉ để hỗ trợ khi lập trình. Mình không nói đây là tất cả tổ hợp có thể. Đặc biệt khi cho motor quay tốc độ khác nhau thì còn rất nhiều tổ hợp nữa.
sẽ là “trợ thủ” tốt nhất của bạn khi lập trình và test các tổ hợp.
Lời khuyên chung: Ví dụ bạn thấy một motor quay chậm hơn những motor còn lại thì bạn có thể bù theo 2 cách. Một là chỉnh software, ví dụ cho motor đó luôn quay nhanh hơn chút. Hai là kiểm tra hardware xem nguyên nhân do đâu, ví dụ ma sát quá cao vì dung sai in không tốt. Nhiều khi phải tìm điểm cân bằng giữa cả hai. Nghĩ theo chuyện cân bàn in cũng vậy: bạn cố làm cho bàn phẳng đều nhất có thể, nhưng vẫn phải calibration và sửa lỗi nhỏ bằng phần mềm. Vì timing rất quan trọng để chuyển động chuẩn, bạn cũng nên cân nhắc cả hai hướng. Nhưng đừng lo quá, motor của bạn đã có encoder hỗ trợ.
Movement/Direction
Top Left
Top Right
Bottom Left
Bottom Right
Forward
Forward
Forward
Forward
Forward
Backward
Backward
Backward
Backward
Backward
Move Right
Backward
Forward
Forward
Backward
Move Left
Forward
Backward
Backward
Forward
Rotate Clockwise
Forward
Backward
Forward
Backward
Rotate Counter clockwise
Backward
Forward
Backward
Forward
Diagonal Forward Right
Stop
Forward
Forward
Stop
Diagonal Forward Left
Forward
Stop
Stop
Forward
Diagonal Backward Right
Backward
Stop
Stop
Backward
Diagonal Backward Left
Stop
Backward
Backward
Stop
Right Curve Forward
Slow Forward
Fast Forward
Slow Forward
Fast Forward
Left Curve Forward
Fast Forward
Slow Forward
Fast Forward
Slow Forward
Right Curve Backward
Slow Backward
Fast Backward
Slow Backward
Fast Backward
Left Curve Backward
Fast Backward
Slow Backward
Fast Backward
Slow Backward
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!