Bộ truyền động cánh tay robot in 3D (3D Printed Robotic Arm Actuator)

Bộ actuator bánh răng in 3D dùng cho cánh tay robot hoặc làm turntable. Tài liệu kèm danh sách linh kiện như NEMA 17, ball bearing, ốc M2.5; có file F3D gốc và gợi ý dùng Arduino/esp32 cùng stepper driver.





Mô tả
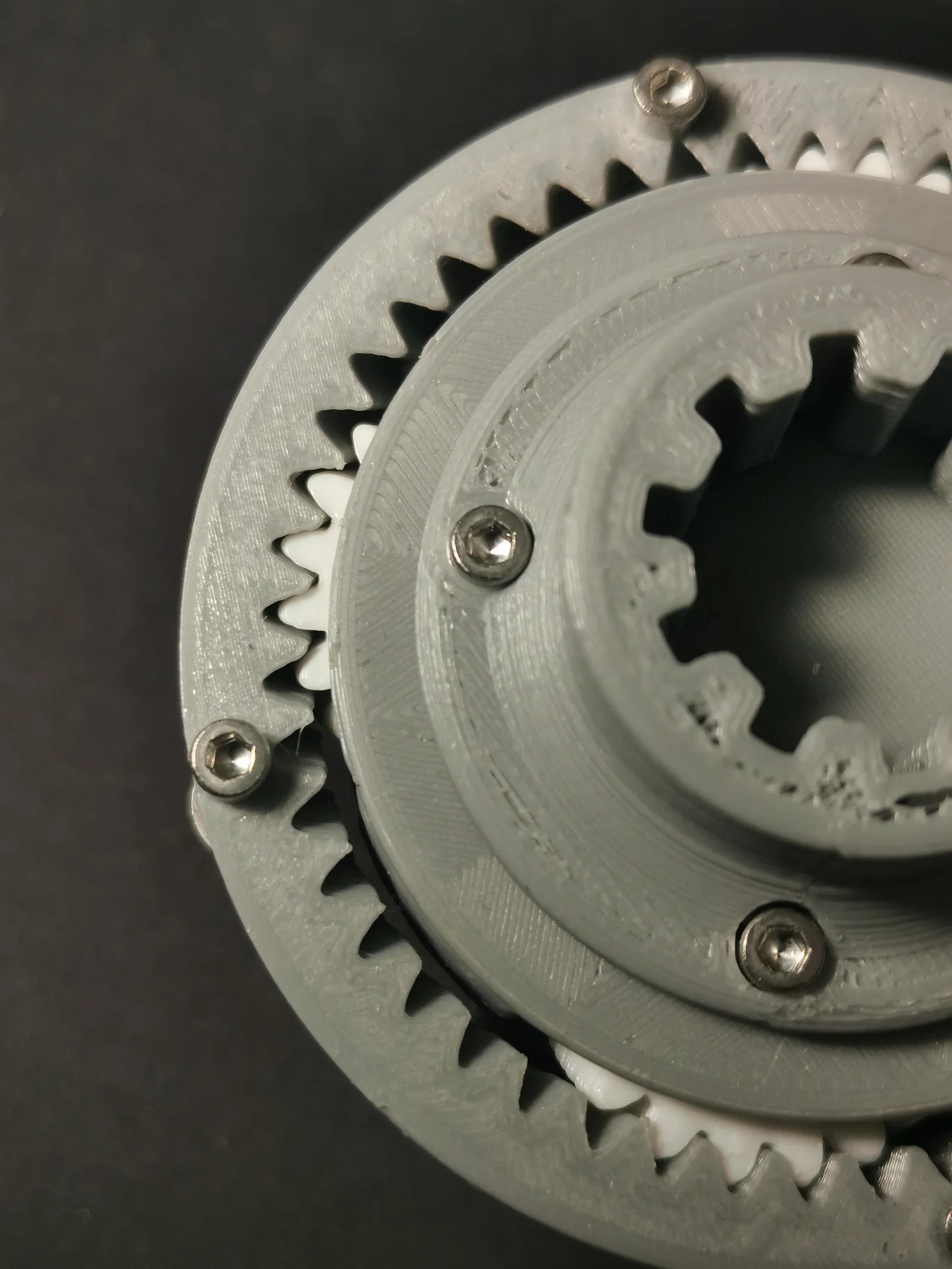
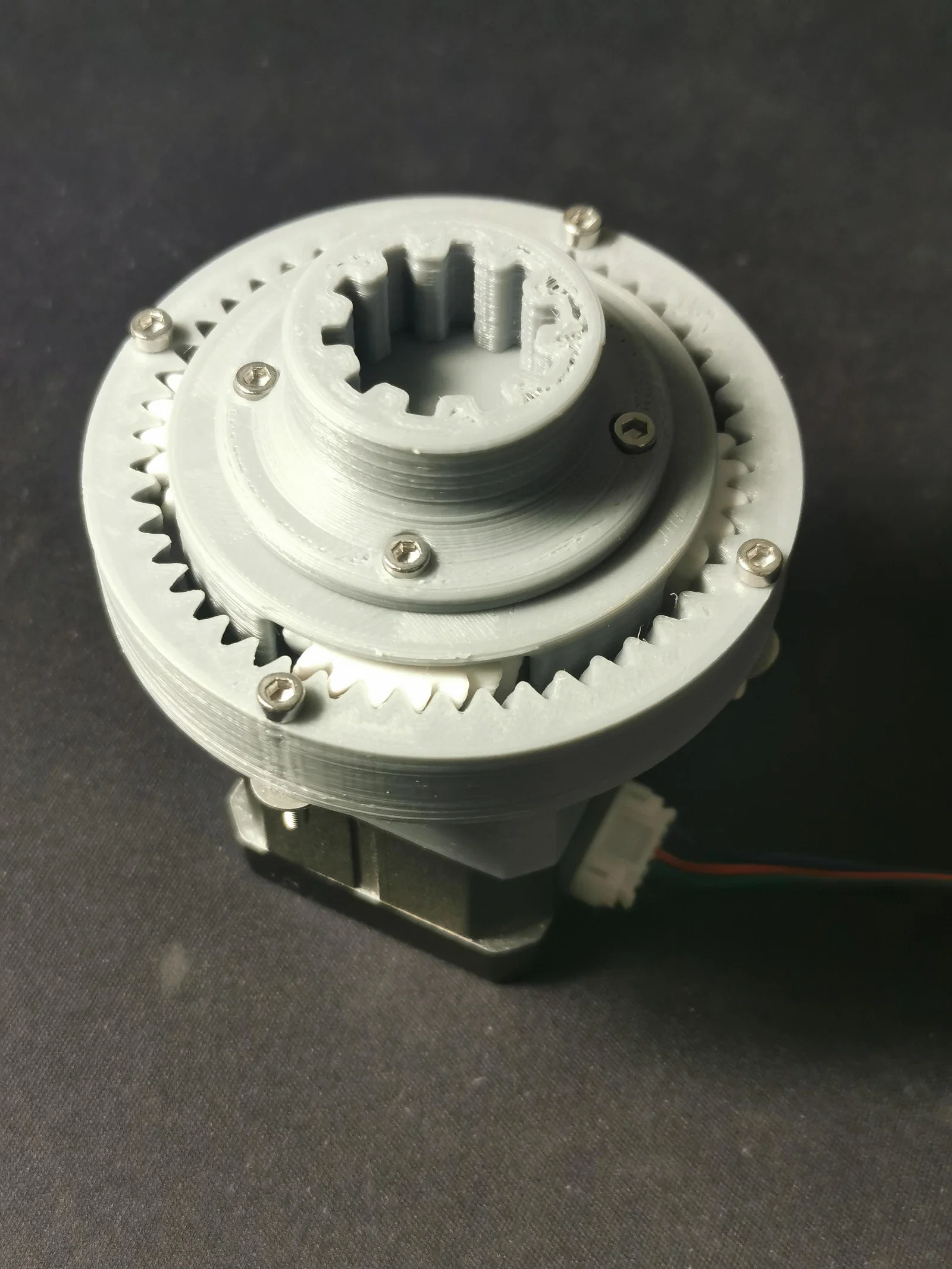
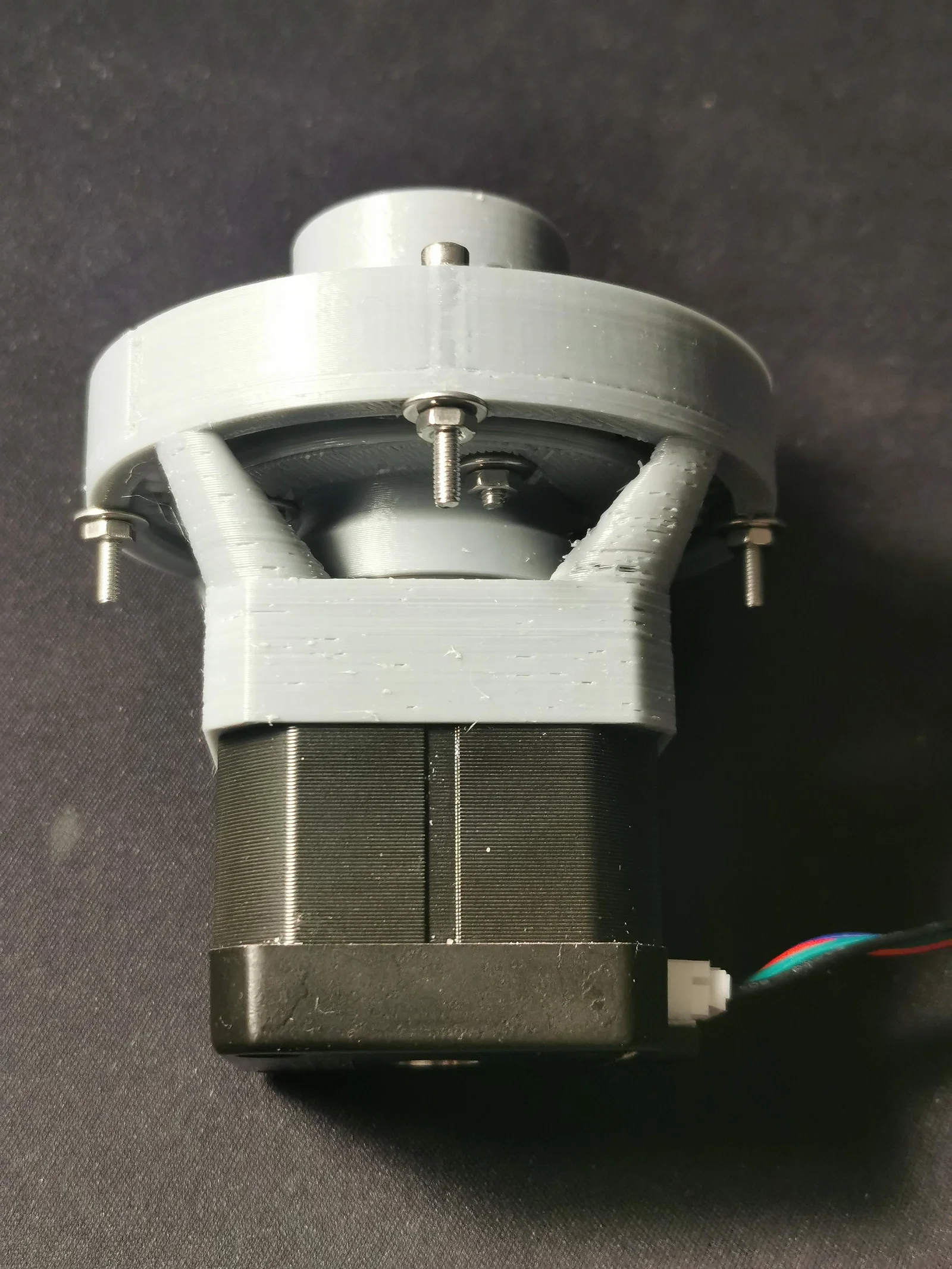
Toàn bộ hệ bánh răng này đều được 3D print.
Nhưng để máy chạy mượt hơn thì sẽ cần thêm các món sau.
Tất cả linh kiện bên dưới đều lấy từ McMaster-Carr, nhưng bạn cũng có thể kiếm được ở hầu hết các cửa hàng chuyên đồ cơ khí/điện tử:
- 1x Stepper motor NEMA 17: 6627T64
- 4x Ball bearing 686-2RS: 4668K231
- 1x Ball bearing 7201-2RS: 6680K35
- 4x ốc M2.5 (Screw), dài 22 mm: 91292A312
- 4x long đền M2.5 (Washer): 91100A110
- 4x đai ốc M2.5 (Hex nut): 90591A270
Phần không được liệt kê ở trên là bộ điều khiển (có thể dùng Arduino hoặc esp32) và driver cho stepper motor.
Bạn có thể dễ dàng tìm các board breakout cho stepper driver. Cách này sẽ làm việc đi dây dễ hơn rất nhiều!
File F3D gốc có trong danh sách files.
Vì hệ này được điều khiển bằng stepper motor, bạn có thể tự set tốc độ và đường cong chuyển động.
Lưu ý: bạn sẽ cần 4x Helical_Radial_PlanetGear cho dự án này.
Bạn có thể xem trọn bộ course hướng dẫn cách tự làm trên trang Instructable của mình!
Giấy phép

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!