Cánh tay robot 6DoF | Hệ thống mô-đun | Giá rẻ | Phục vụ giáo dục

Hệ thống mô-đun giúp lắp ráp cánh tay robot 6DoF giá rẻ. Phù hợp cho việc học tập, nghiên cứu động học và thử nghiệm robotics. Lưu ý: Không dùng để nâng vật nặng.






Mô tả
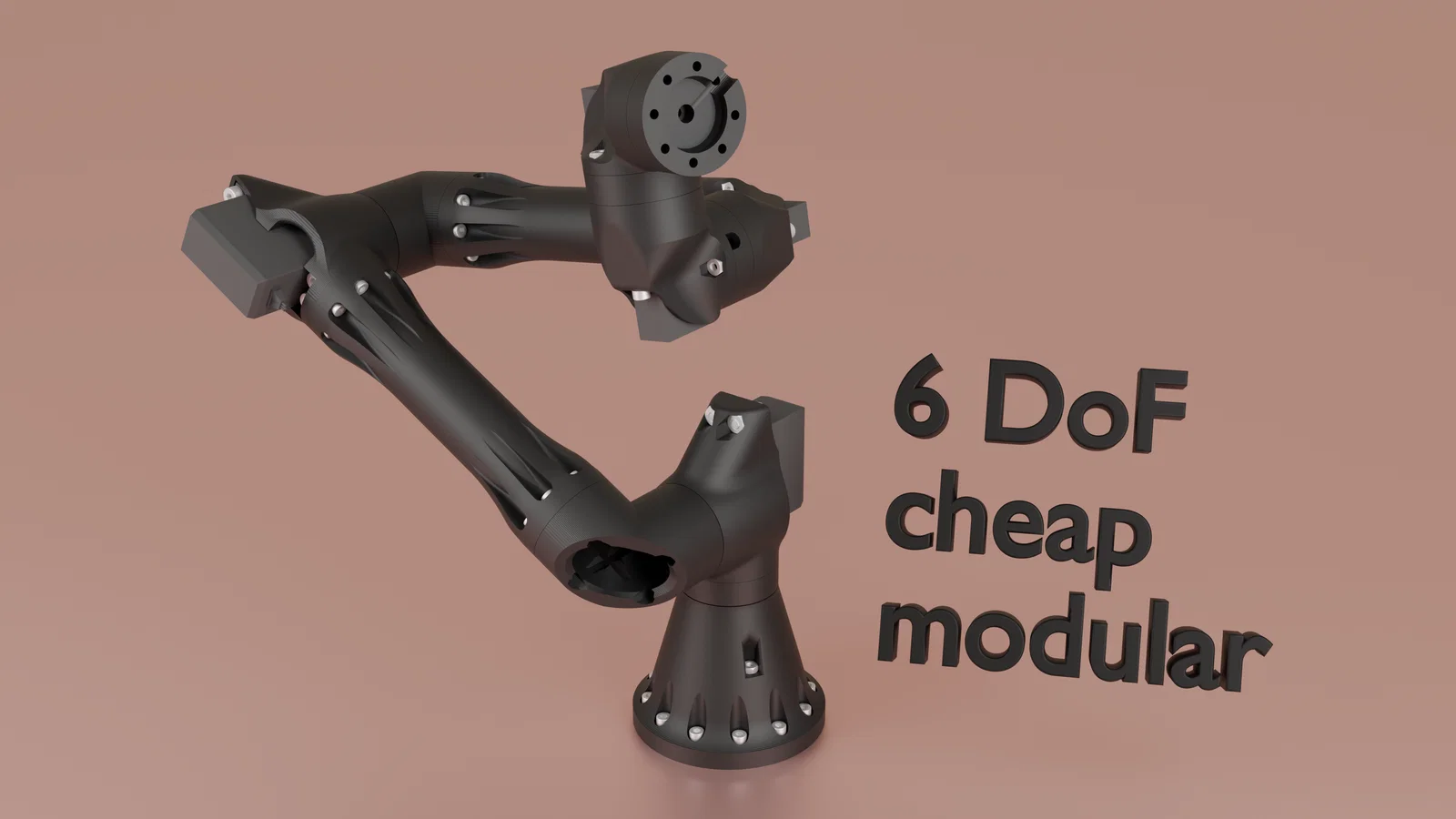
Đây là hệ thống mô-đun cho phép bạn lắp ráp nhiều cấu trúc động học khác nhau, hay còn gọi là cánh tay robot. Bạn có thể xem các mô-đun ở hình 1. Bộ truyền động được chọn là các loại mô-tơ servo rất rẻ, không có hộp số, điều này mang lại cả ưu điểm lẫn nhược điểm:
- Giá rẻ và đơn giản. Các loại servo lớn (MG996R, ~8€) và servo nhỏ (MG90S, ~3€) sẽ điều khiển trực tiếp phân đoạn tiếp theo. Không cần thêm bộ mã hóa vòng quay hay hộp số phức tạp. Mỗi mô-đun trung gian chỉ cần hai chi tiết in 3D, một vòng bi (20x32x7mm, ~1,5€; riêng phần đế cần 2 cái), mô-tơ và vài con ốc. Bạn có thể điều khiển nó bằng một vi điều khiển giá rẻ như ESP8266 (~5€).
- Sức mạnh và độ mượt hạn chế. Khi được cấp điện áp định mức tối đa (7.2V / 6V), cánh tay này có thể dễ dàng di chuyển và nâng trọng lượng chính nó ngay cả khi duỗi thẳng hoàn toàn. Tuy nhiên, nếu thêm tải trọng, các mô-tơ servo sẽ nhanh chóng bị quá tải. Hơn nữa, độ mượt khi chuyển động không thể tối ưu qua phần mềm vì vòng lặp kiểm soát vị trí đã được tích hợp sẵn trong các mô-tơ. Việc sử dụng bộ giảm chấn có thể giải quyết vấn đề này, nhưng hiện tại mình chưa tìm được loại nào phù hợp với ngân sách.
- Phạm vi hoạt động hạn chế. Hệ thống này không dùng được các loại servo quay liên tục vì chúng không kiểm soát được vị trí chính xác. Bắt buộc phải dùng loại servo có giới hạn góc quay (180° cho loại nhỏ, 180° hoặc 270° cho loại lớn), điều này làm hạn chế phạm vi hoạt động của robot.
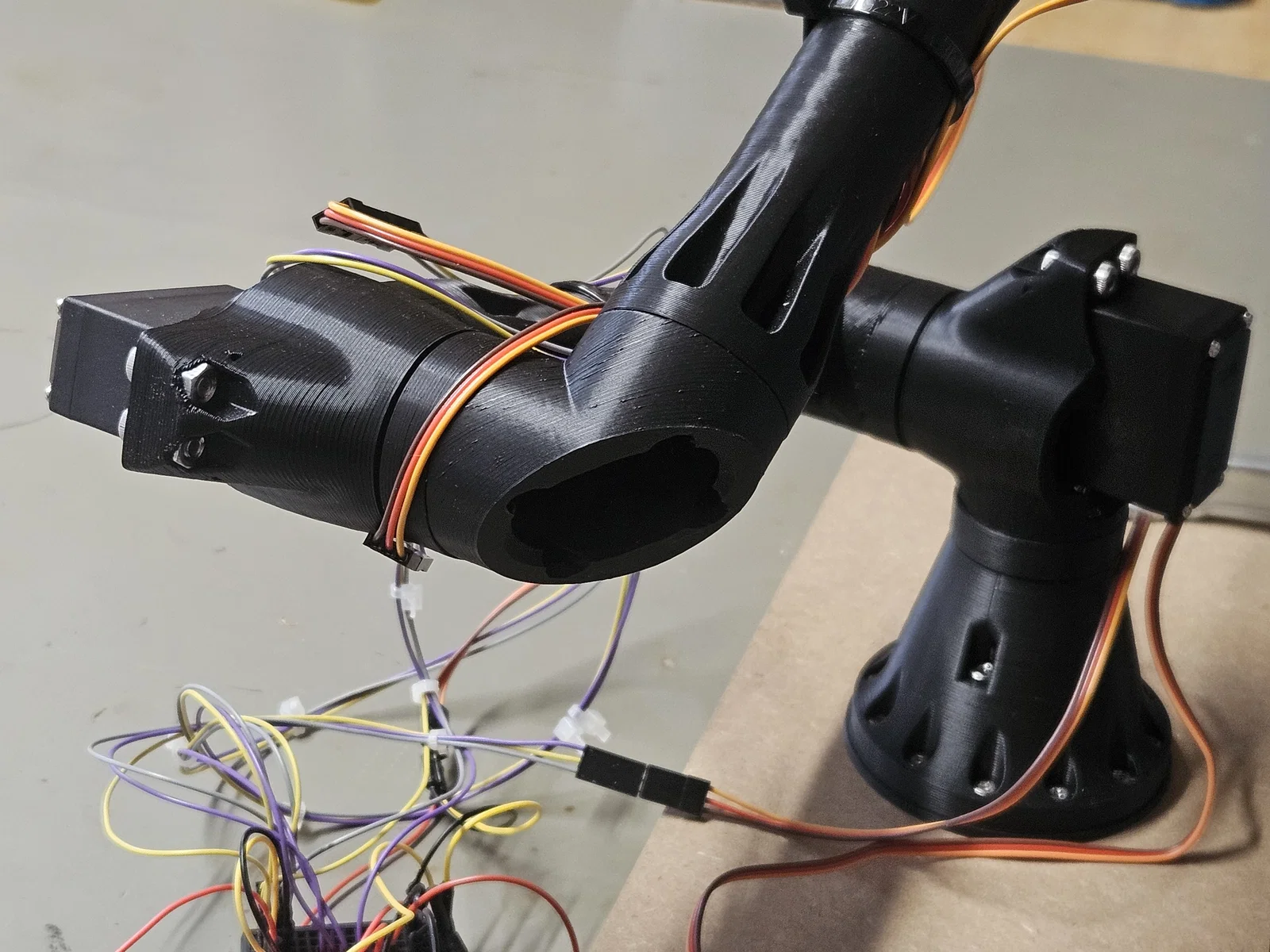
 Hình 1: Các mô-đun khác nhau và cách lắp ráp. Các mô-đun được kết nối với nhau bằng ốc vít M3 với độ dài khác nhau, chủ yếu là M3x10.
Hình 1: Các mô-đun khác nhau và cách lắp ráp. Các mô-đun được kết nối với nhau bằng ốc vít M3 với độ dài khác nhau, chủ yếu là M3x10.
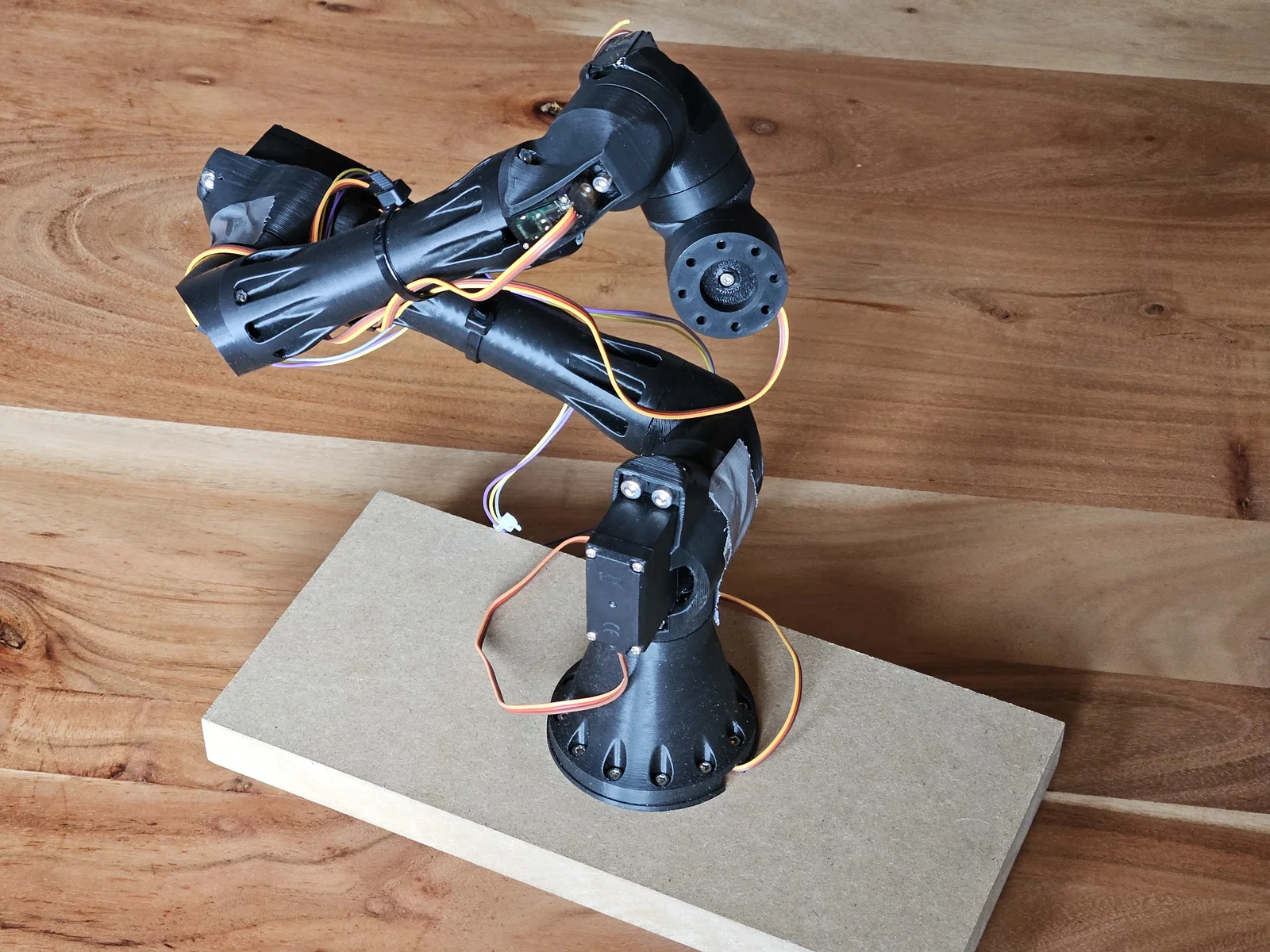
Đây là hệ thống giúp bạn có trải nghiệm thực tế nhanh chóng và tiết kiệm về cánh tay robot. Các kiến thức như động học thuận/nghịch, không gian cấu hình/không gian làm việc và ma trận Jacobian có thể được thử nghiệm và giảng dạy rất tốt với hệ thống này. Cánh tay 6DoF trong hình 2 có chi phí vật liệu khoảng 50€, bao gồm cả đồ mua và đồ in. Đây là mức giá khá rẻ cho một cánh tay robot 6DoF để bàn.
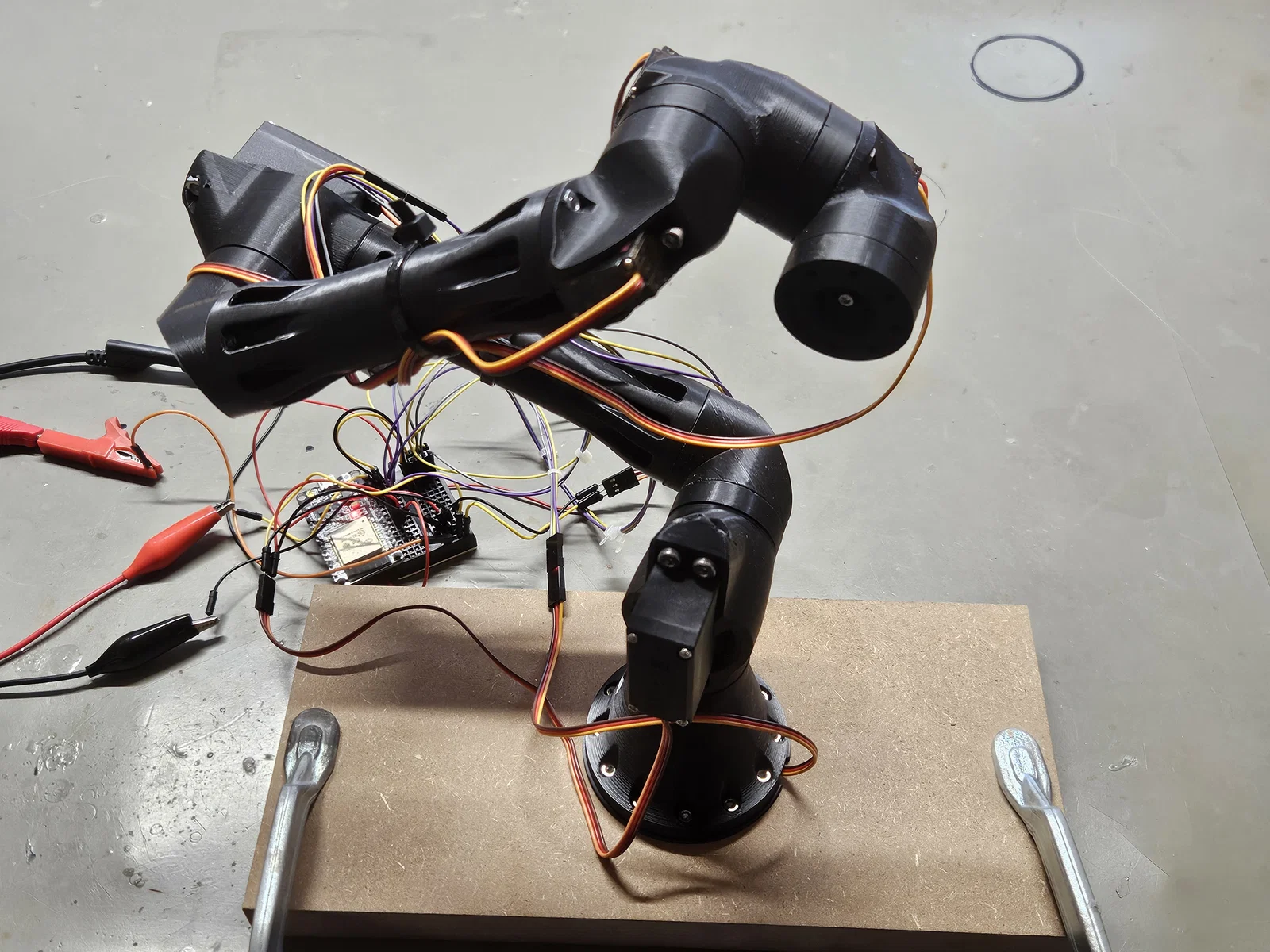
Tất nhiên, đây chưa phải là hệ thống dùng để thực hiện công việc hay nâng vác đồ đạc. Hiện tại mình đang phát triển phiên bản thứ hai, hy vọng sẽ sử dụng được mô-tơ quay 360° và vòng lặp điều khiển mượt mà hơn. Nhưng ở dạng hiện tại, cánh tay này chủ yếu phù hợp cho mục đích giáo dục.
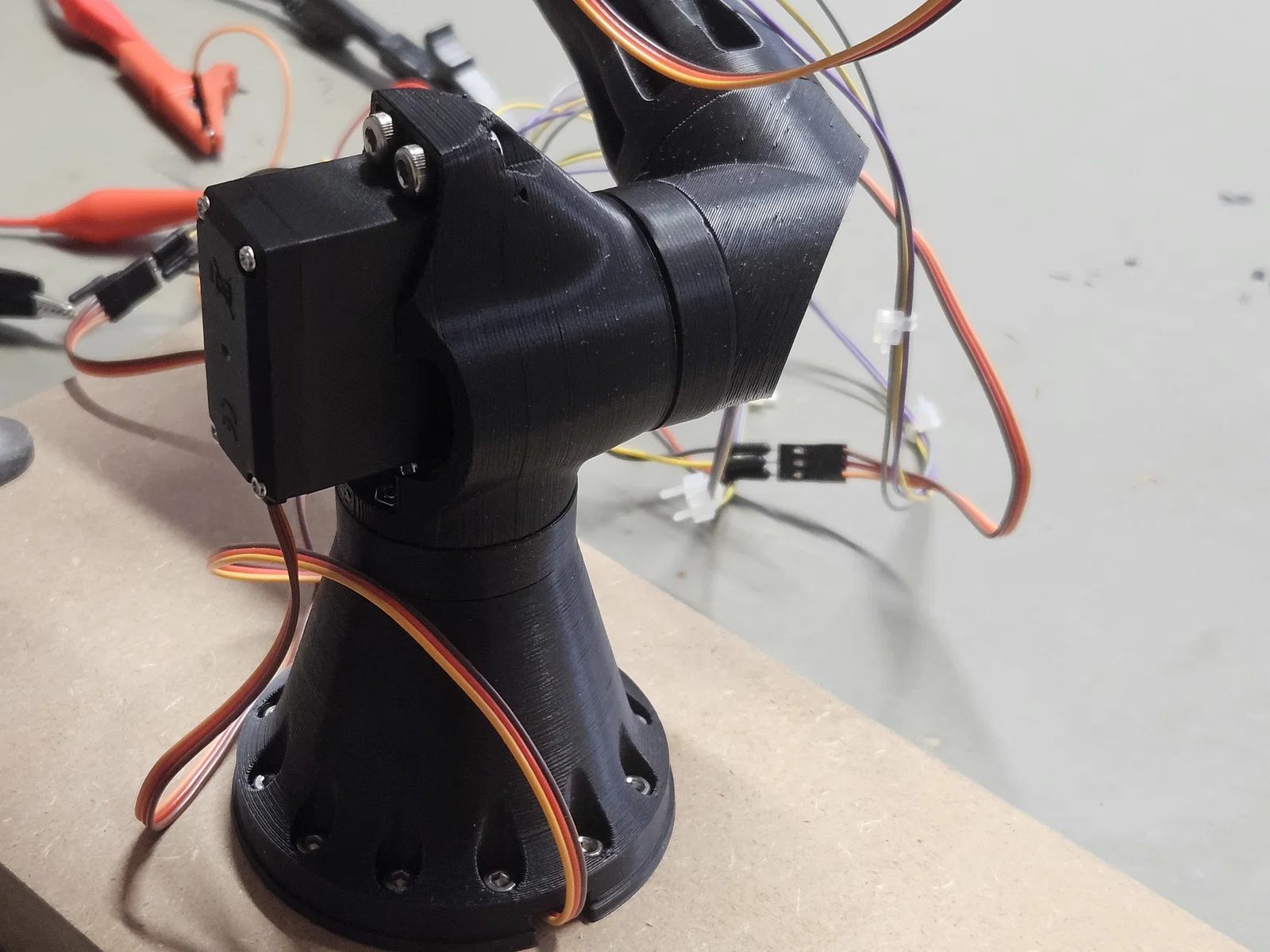
 Hình 2: Lắp ráp cấu hình cụ thể mà mình đã thực hiện: cánh tay robot 6DoF.
Hình 2: Lắp ráp cấu hình cụ thể mà mình đã thực hiện: cánh tay robot 6DoF.
 Hình 3: Tất cả các chi tiết in 3D ở hướng in tối ưu nhất.
Hình 3: Tất cả các chi tiết in 3D ở hướng in tối ưu nhất.
Nếu bạn muốn dùng loại servo khác có kích thước tương tự, hãy đảm bảo trục của chúng bằng kim loại vì các phần rotor cần được ép chặt vào trục đó để tạo kết nối truyền mô-men xoắn.
Các mẫu servo mình đã dùng để dựng hình có thể tìm thấy tại đây: & MG996R
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!