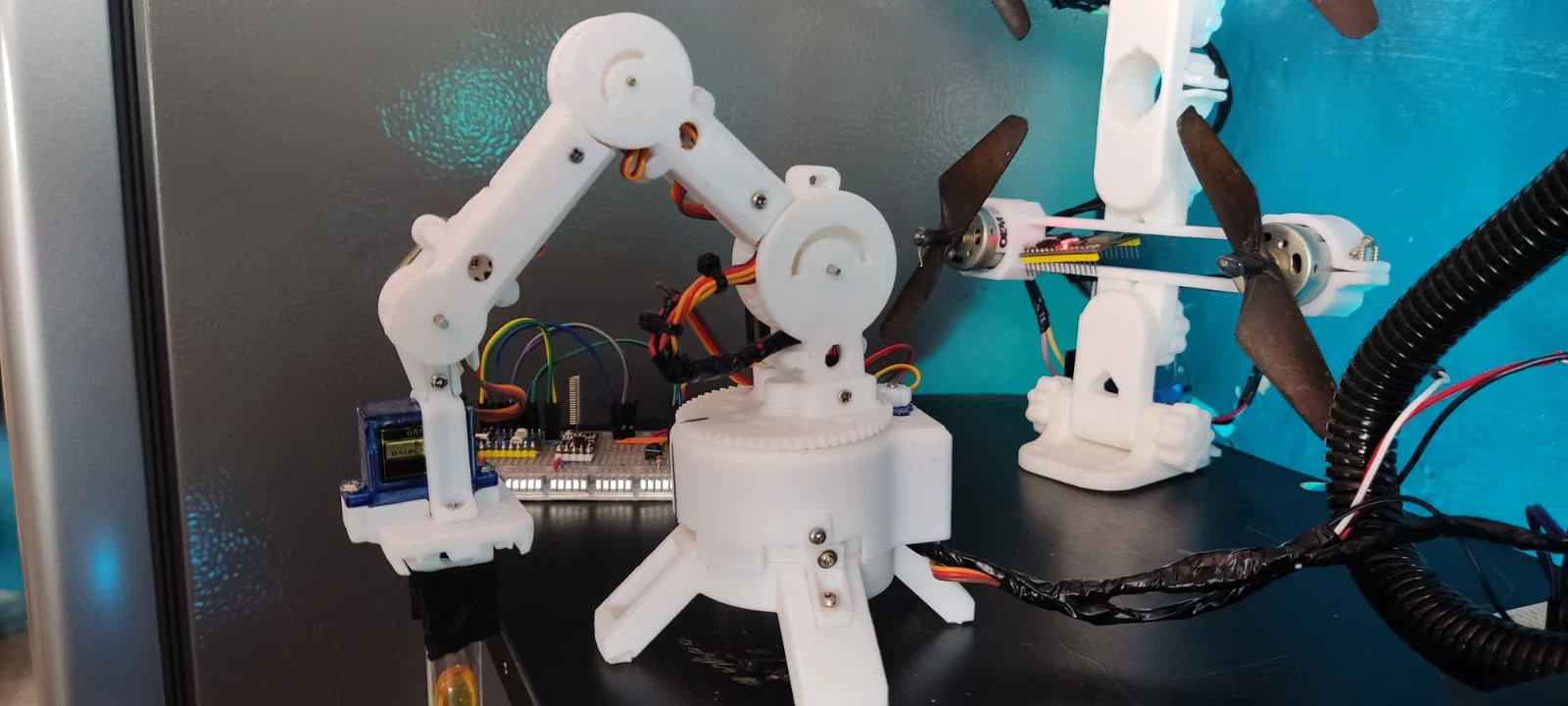
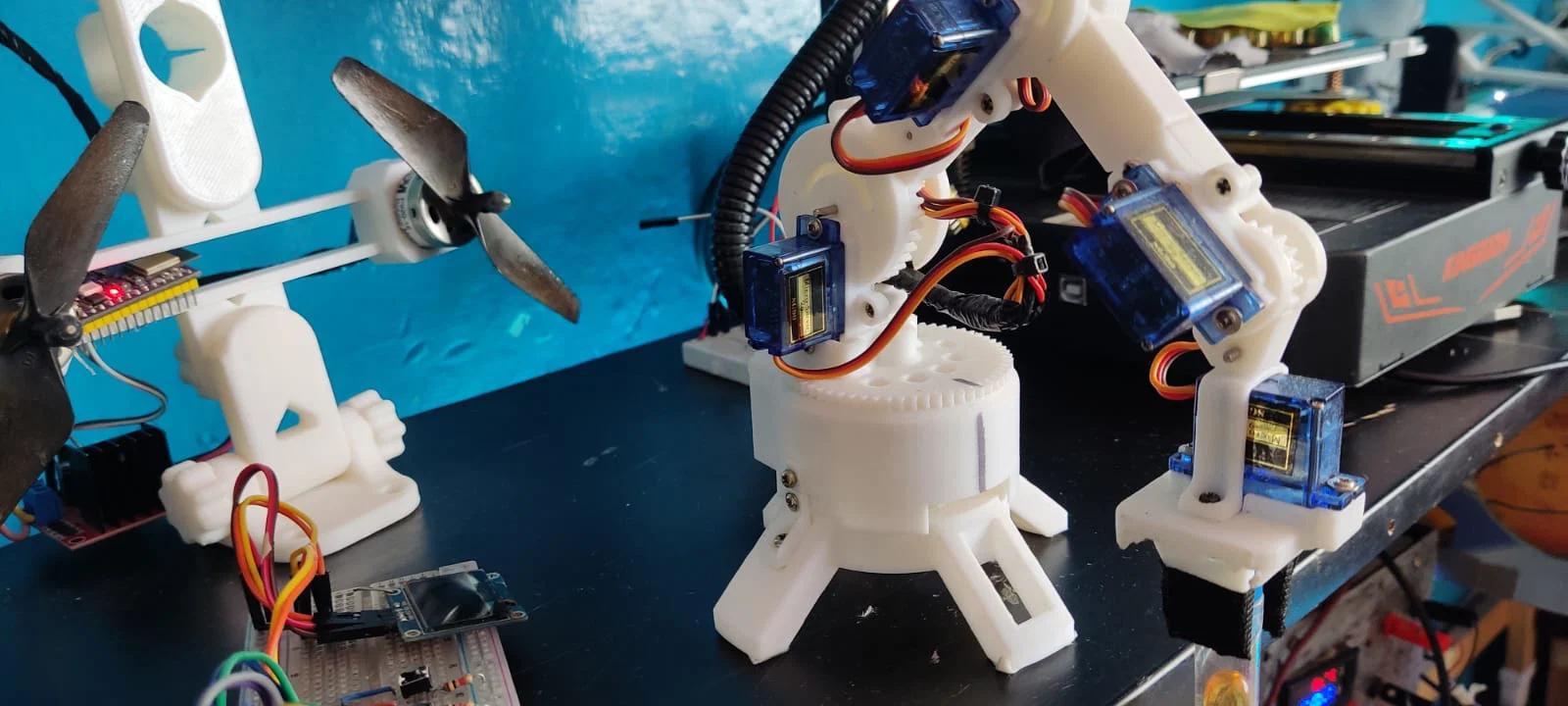
Cánh tay robot 5 bậc tự do, linh hoạt cao (High Articulation)

Mẫu cánh tay robot 5 bậc tự do cho chuyển động chính xác, linh hoạt ở từng khớp. Dùng servo 360 độ/continuous rotation giúp kiểm soát tốt, mở rộng biên độ, tối ưu hiệu suất cho nhiều ứng dụng automation và robotics.




Mô tả
Dự án này giới thiệu quá trình thiết kế và phát triển một cánh tay robot với 5 bậc tự do, có thể thực hiện các chuyển động chính xác với độ linh hoạt cao ở từng khớp. Được trang bị servo 360 độ, cánh tay mang lại tính đa dụng vượt trội, cho phép thực hiện các tác vụ phức tạp và thích nghi với nhiều ứng dụng tự động hóa và robotics khác nhau. Các continuous rotation servo cung cấp khả năng kiểm soát tốt cho mỗi khớp, tối đa hóa cả biên độ chuyển động lẫn hiệu suất động cơ, tạo nên một hệ thống cánh tay robot rất thực dụng và dễ tùy biến.
Giấy phép

File mô hình





























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!