Bộ van điều tiết khí thải máy in điều khiển bằng Arduino/Servo

Giải pháp van điều tiết tự động cho hệ thống thoát khí máy in 120mm sử dụng Arduino Pro Micro và servo Hitec HS81. Đảm bảo luồng khí được kiểm soát chặt chẽ thông qua OctoPrint trên Raspberry Pi, khắc phục nhược điểm của van trọng lực thông thường.


Mô tả
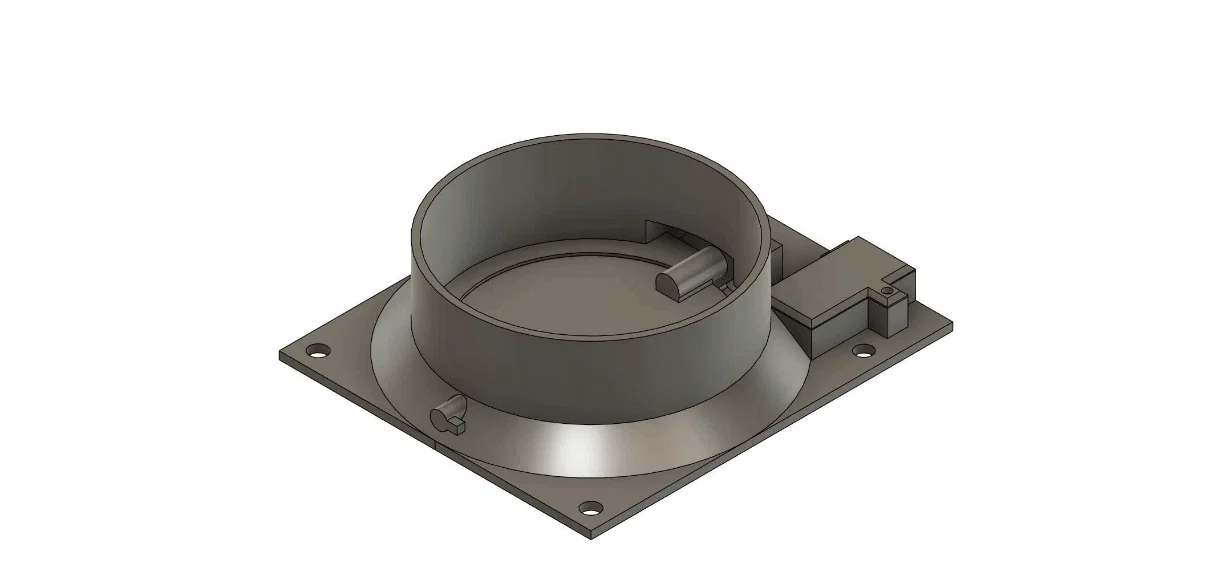
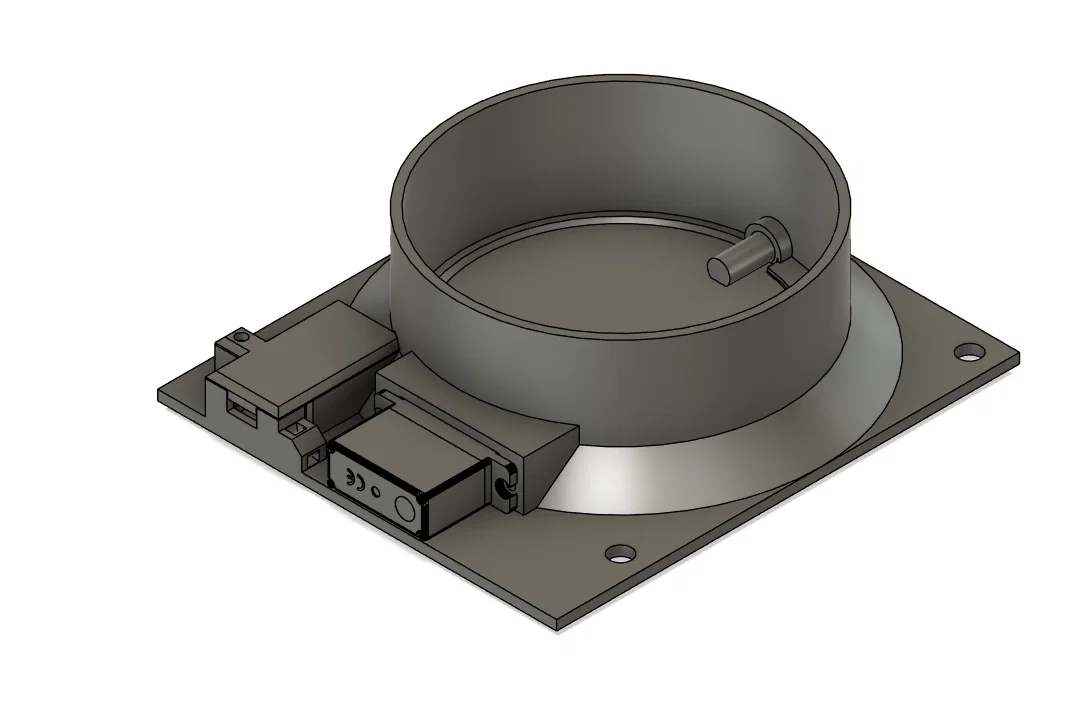
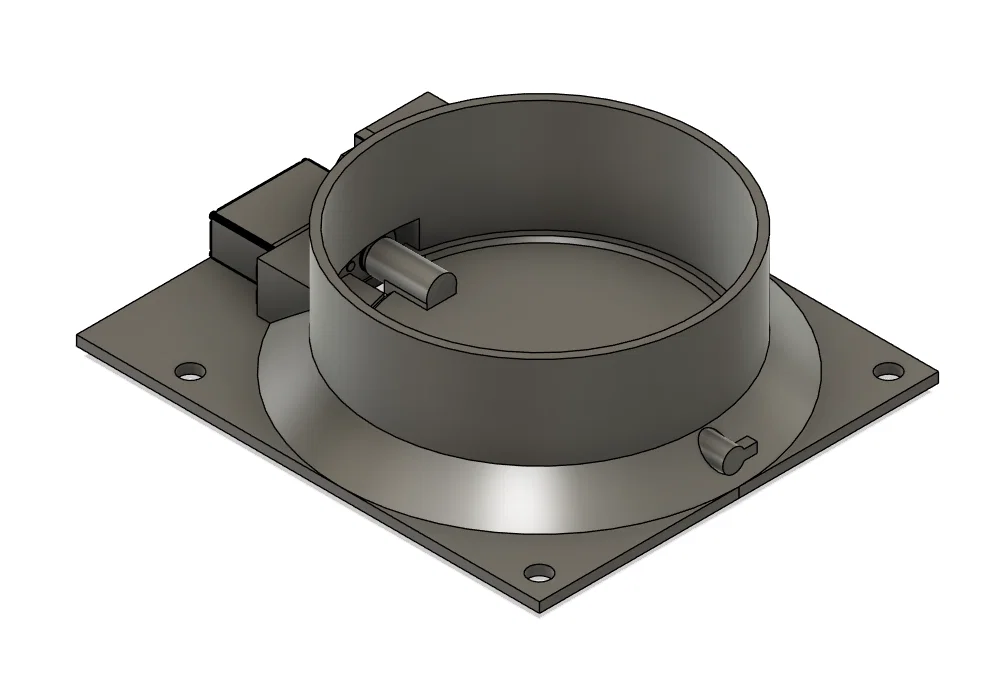
Đây là bộ phận van điều tiết ống dẫn dùng servo mà mình sử dụng cho hệ thống thoát khí máy in (từ quạt 120mm sang ống mềm 4 inch) dẫn lên không gian áp mái. Do chênh lệch áp suất không khí, không khí nóng/lạnh từ trên mái thỉnh thoảng bị hút ngược vào trong buồng máy và nhà mình. Bộ van điều tiết này giúp đảm bảo luồng khí chỉ lưu thông qua ống dẫn khi máy in và quạt hút đang hoạt động.
Giải pháp này trở nên cần thiết vì các loại van trọng lực thông thường không thể mở được (ngay cả loại nhẹ nhất) khi quạt chạy ở mức lưu lượng thấp. Việc điều khiển bằng servo đảm bảo cánh van luôn đóng mở đúng cách để chặn luồng khí khi không in ấn.
Hệ thống được điều khiển bằng bo mạch Arduino Pro Micro thông qua chân GPIO từ Raspberry Pi chạy OctoPrint và plugin PSU Control.
Arduino phải được cấp nguồn từ cổng USB trên Pi để có cùng điểm tham chiếu mass (ground) cho chân GPIO.
Mình đã thiết kế bộ này sử dụng servo sub-micro - Hitec HS81.
Cách đấu nối: Kết nối dây Servo với Arduino:
- Dây đỏ vào chân RAW trên Arduino
- Dây đen vào chân GND trên Arduino
- Dây vàng vào chân A1 trên Arduino
Kết nối Arduino với RPI:
- Cổng USB trên Arduino nối vào cổng USB-A trên RPi (cung cấp nguồn cho Arduino và tạo ground chung để kết nối chân GPIO).
- Chân GPIO 14 của Arduino nối vào GPIO 22 trên RPi
Sử dụng (7) vít M3 6mm để lắp servo, lắp cánh van và nắp che.
Đoạn mã Fast Close (Đóng nhanh):
#include <Servo.h>
// Định nghĩa đối tượng servo
Servo servo;
// Định nghĩa chân input
const int gpio_input = 14;
// Định nghĩa chân điều khiển servo - A1 trên bo mạch là chân 19
const int servo_pin = 19;
// Định nghĩa góc cho vị trí đóng/mở
const int open_flap = 40;
const int close_flap = 132;
// ... (phần code còn lại giữ nguyên để đảm bảo tính kỹ thuật)Đoạn mã Slow Close (Đóng chậm): (bạn có thể thử nghiệm thay đổi movement_increment và movement_delay để chuyển động êm ái hơn).
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình






Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!