OTTO-Jockey: Biến chú robot OTTO thành kỵ sĩ Minecraft với tính năng FPV

Nâng cấp chú robot HP OTTO của bạn với bản mod OTTO-Jockey lấy cảm hứng từ Minecraft. Thiết kế này tích hợp hệ thống camera FPV thông qua ESP32, cho phép bạn quan sát từ góc nhìn của robot khi điều khiển.

Mô tả
Giới thiệu
Trong vài năm qua, mình đã dành rất nhiều tâm huyết cho việc chế tạo các dòng robot di động nhỏ gọn, chủ yếu là phục vụ cho đấu trường robot. Mình biết đến dòng robot OTTO qua một buổi workshop tại trường đại học và sau đó là tìm hiểu thêm cho một dự án ở công ty. Mình cực kỳ ấn tượng với những bản độ (community builds) của cộng đồng dành cho OTTO. Vì muốn hoàn thành mục tiêu công việc cũng như mong muốn tự tay lắp ráp một chú robot OTTO cho riêng mình, mình đã nảy ra ý tưởng thêm chút hương vị Minecraft vào bộ sưu tập OTTO, đồng thời mang đến một tính năng mới để tăng thêm phần thú vị! Xin giới thiệu với mọi người - OTTO Jockey!
Thiết kế
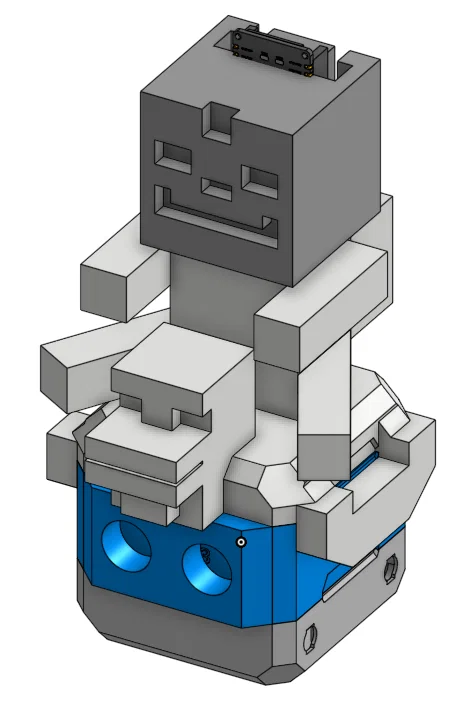
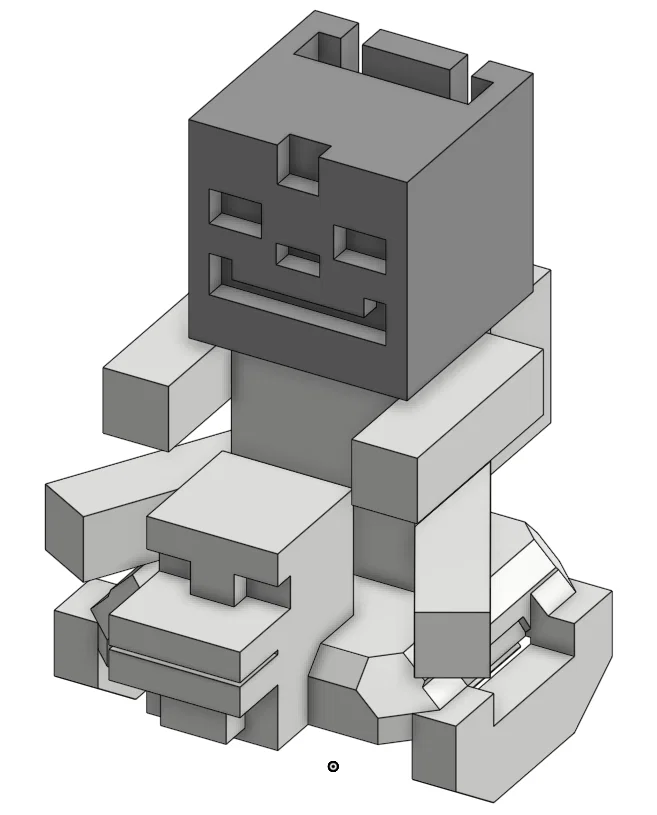
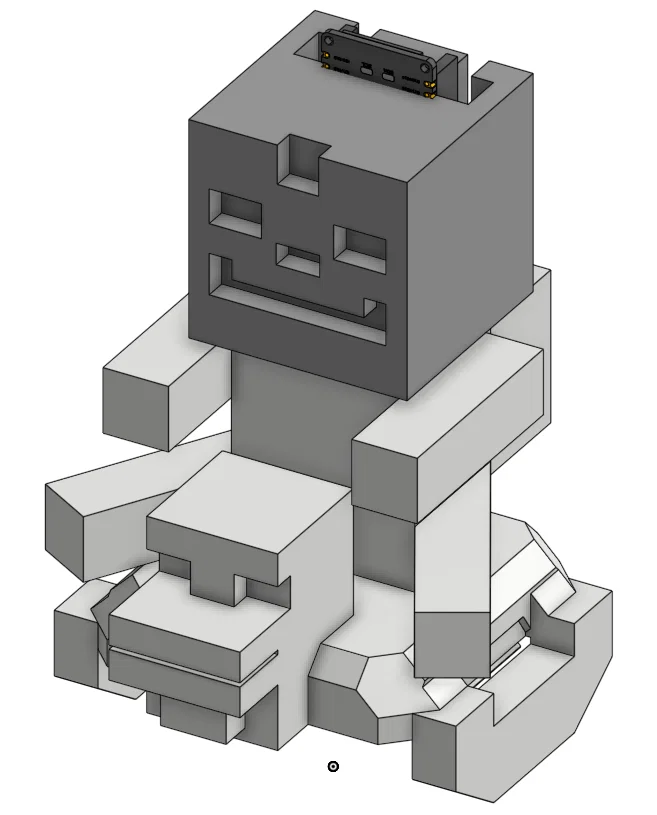
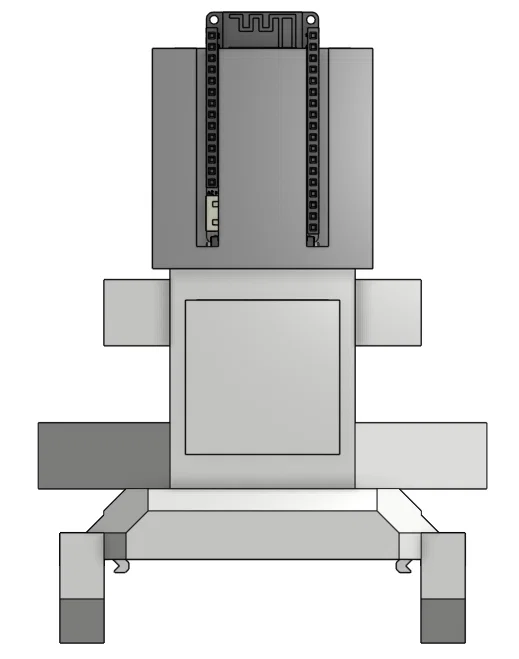
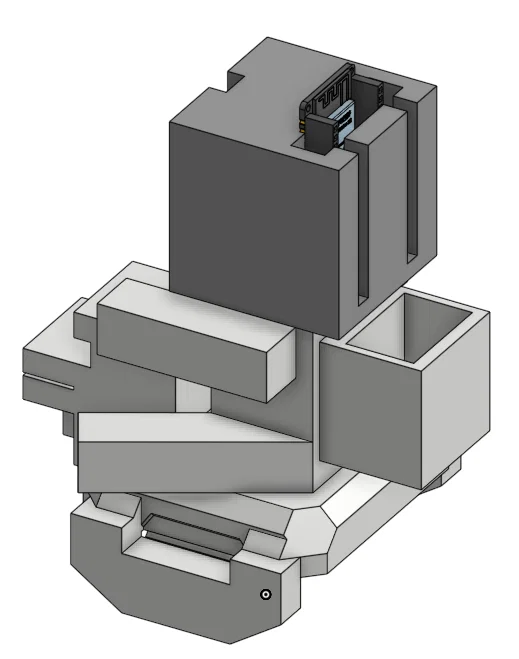
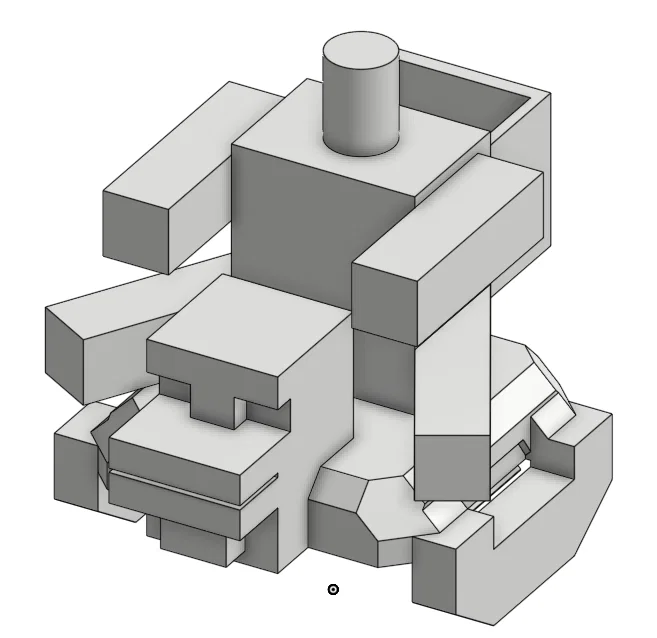
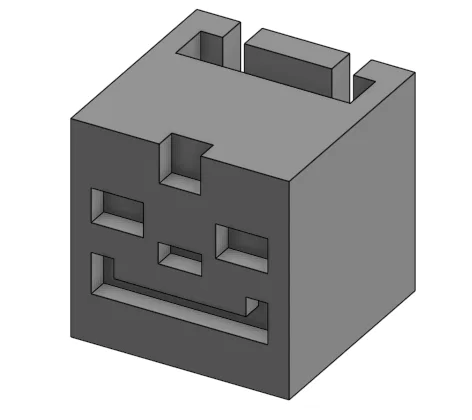
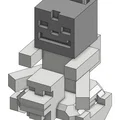
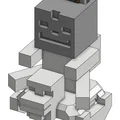
Ý tưởng của bản remix cho dòng robot HP OTTO này là thiết kế lại phần nắp trên của robot, biến nó thành một nhân vật trông giống như Chicken Jockey (kỵ sĩ gà) trong Minecraft. Phần nắp mới trông giống như phần đầu của con gà trong Minecraft với đầu ở phía trước và cánh ở hai bên. Trên lưng còn có một nhân vật cưỡi, với phần không gian giống như chiếc ba lô để chứa pin Lipo cho hệ thống camera dùng ESP32, giúp bổ sung tính năng FPV. Phần đầu được thiết kế để khớp vào thân, có khe cắm bảng mạch ESP32 ở phía sau và một khe nhỏ ở trán để gắn camera OV3660.
Phần điện tử khá đơn giản cho bản thử nghiệm tính năng FPV này. Mình chọn sử dụng Firebeetle 2 ESP32S3 của DFRobot, loại đã tích hợp sẵn camera và cổng cắm pin Lipo. Bạn chỉ cần cắm pin Lipo tương thích là robot sẵn sàng hoạt động. Firebeetle 2 đi kèm với camera OV3660 cho độ phân giải khá ổn.
Ý tưởng tổng thể là thay thế phần nắp trên hiện tại của HP OTTO bằng phần nắp mới này, gắn thêm đầu hoặc phiên bản tùy chỉnh theo ý bạn, sau đó đặt các thiết bị điện tử vào các khe trên lưng nhân vật. Tiếp theo, bạn chỉ cần bật nguồn cho OTTO và hệ thống ESP32 FPV, sau đó mở trình duyệt web để truy cập vào server camera là có thể trải nghiệm FPV cơ bản trong khi điều khiển OTTO di chuyển xung quanh.
Cơ khí
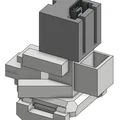
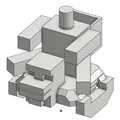
Về phần vật lý, nhiệm vụ chính là in 3D 2 mảnh này. Khe cắm ở phía sau đầu có thể dùng được ngay cả khi bạn chọn loại ESP32 tích hợp camera khác, nhưng nhớ kiểm tra và điều chỉnh khe cắm nếu cần. Khe camera cũng có thể tùy chỉnh. Tuy nhiên, nhìn chung thì các chi tiết này đã sẵn sàng để in. Do không có máy in 3D trong tay tại thời điểm này và mình cũng không có bộ kit OTTO để kiểm tra, mình hy vọng sẽ cập nhật thêm trong tương lai.
Để in các bộ phận, bạn chỉ cần:
- Máy in 3D FDM
- Nhựa PLA màu trắng
- Nhựa PLA màu xanh lá/xanh dương hoặc bất kỳ màu nào bạn thích
Thiết kế này không cần dùng ốc vít và cài đặt Slicer rất cơ bản vì đây không phải là bản in đòi hỏi khắt khe. Nếu phần mềm Slicer của bạn cho phép, bạn có thể chỉnh màu sắc trên thân nhân vật và phần đầu.
Hãy đưa các file STL vào Slicer, kiểm tra và tiến hành in. Khi lắp ráp, sau khi đã làm sạch các chi tiết in, hãy thay thế nắp trên của HP OTTO bằng bộ phận này, rồi gắn đầu hướng về phía trước. Cuối cùng, đặt mạch điện đã lập trình vào, pin Lipo vào khe ba lô, ESP32 vào khe trên đầu và dán camera vào khe ở trán.
Điện tử
Mạch điện gồm 3 thành phần chính:
- ESP32 tích hợp camera (mình chọn DFRobot Firebeetle 2 ESP32S3)
- Pin Lipo 2S tương thích
- Mô-đun camera OV3660 kết nối bằng cáp ribbon
Bạn cần lập trình ESP32 với mã ví dụ CameraWebServer sau khi đã thiết lập Arduino IDE với thư viện board ESP32. Hãy làm theo hướng dẫn này để cài đặt môi trường cho FireBeetle 2. Khi lập trình, bạn cần cài thư viện DFRobot_AXP313A. Sau đó, mình khuyên bạn nên nạp ví dụ CameraWebServer có sẵn trong Arduino IDE. Trước khi nạp, hãy đảm bảo điền đúng SSID và mật khẩu Wi-Fi, đồng thời trong file boarddata.h, hãy bỏ comment dòng định nghĩa cho Firebeetle 2 và comment dòng của các board khác. Sau khi nạp xong, lấy địa chỉ IP và mở trên trình duyệt của thiết bị dùng chung mạng WLAN với ESP32 để xem luồng hình ảnh từ camera.
Ý kiến và ý tưởng tương lai
Bản dựng này là một thử nghiệm cho hệ thống FPV có thể gắn thêm vào thiết kế HP OTTO. Mình tin rằng tính năng FPV chắc chắn sẽ tạo nên sự ấn tượng và tăng thêm nhiều cách để tận hưởng robot OTTO.
Hướng phát triển tương lai:
- Thêm nhiều lựa chọn thiết kế độc đáo hơn cho nhân vật cưỡi.
- Tích hợp camera ESP32 trực tiếp vào board ESP32 gốc của HP OTTO.
- Tùy chọn nâng cấp xử lý với PiZeroW.
- Nếu dùng được PiZeroW, có thể phát triển thêm phần mềm để biến OTTO thành robot đồng hành trên bàn làm việc!
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!