Otto B.O.T. - Battery Operated Titan: Robot Ninja Hình Nhân Cải Tiến

Otto B.O.T. là phiên bản nâng cấp của Otto Ninja dành cho HP Otto Challenge, tích hợp servo cho tay và mắt LED. Thiết kế mô-đun cho phép lắp ráp dễ dàng với linh kiện chính hãng HP hoặc Arduino tiêu chuẩn.















Mô tả
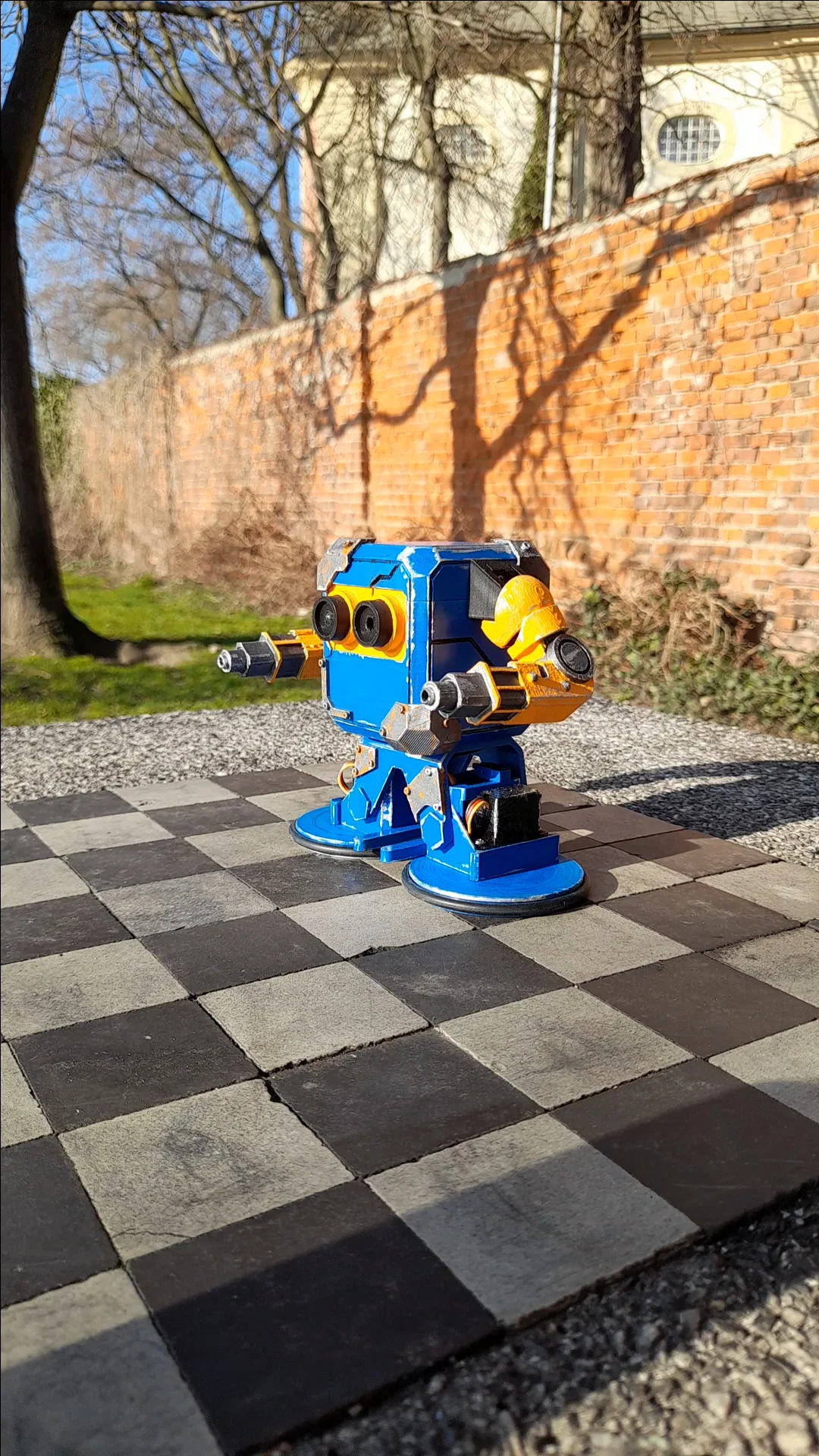
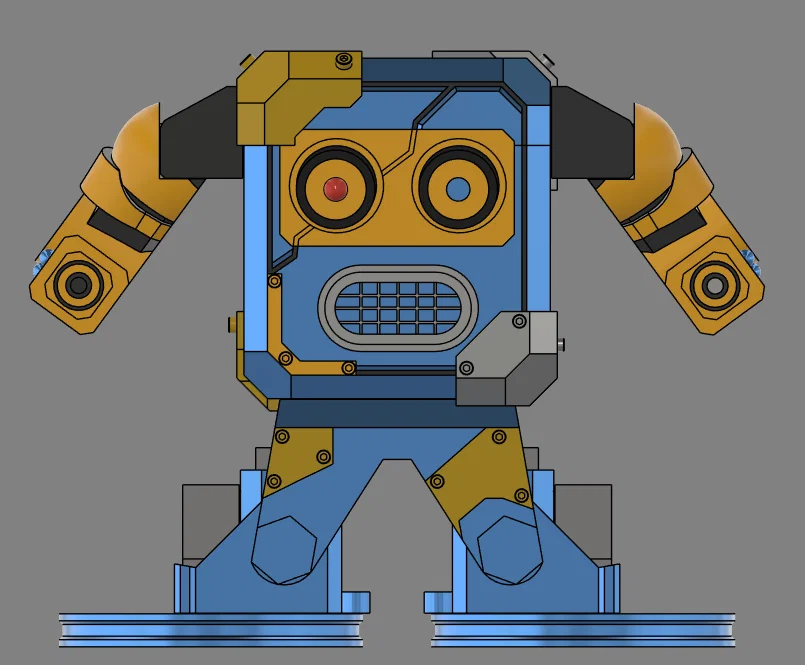
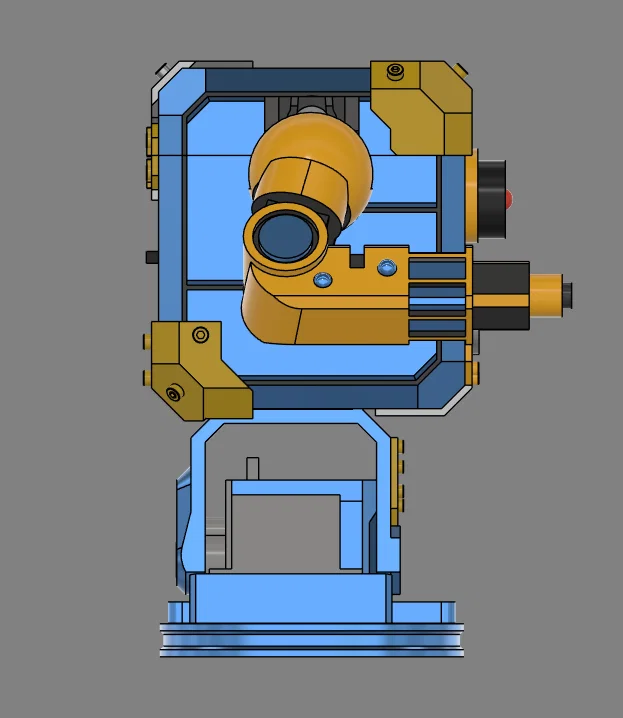
Otto B.O.T. – Battery Operated Titan, phiên bản robot hình nhân Ninja nhỏ gọn.
Đây là phiên bản cải tiến của Otto Ninja, được thiết kế đặc biệt cho thử thách HP Otto Challenge. Mẫu mô hình này được kỹ sư tối ưu hóa để hoạt động mượt mà với bo mạch chính thức của HP Otto mà không cần phải chế thêm các thiết bị điện tử phức tạp.

Xem Otto B.O.T. vận hành!
Trong video này, bạn có thể thấy phiên bản robot hình nhân nhỏ gọn di chuyển và điều khiển các servo ở tay. Hãy chú ý đến mô-đun mắt đèn LED khi hoạt động.
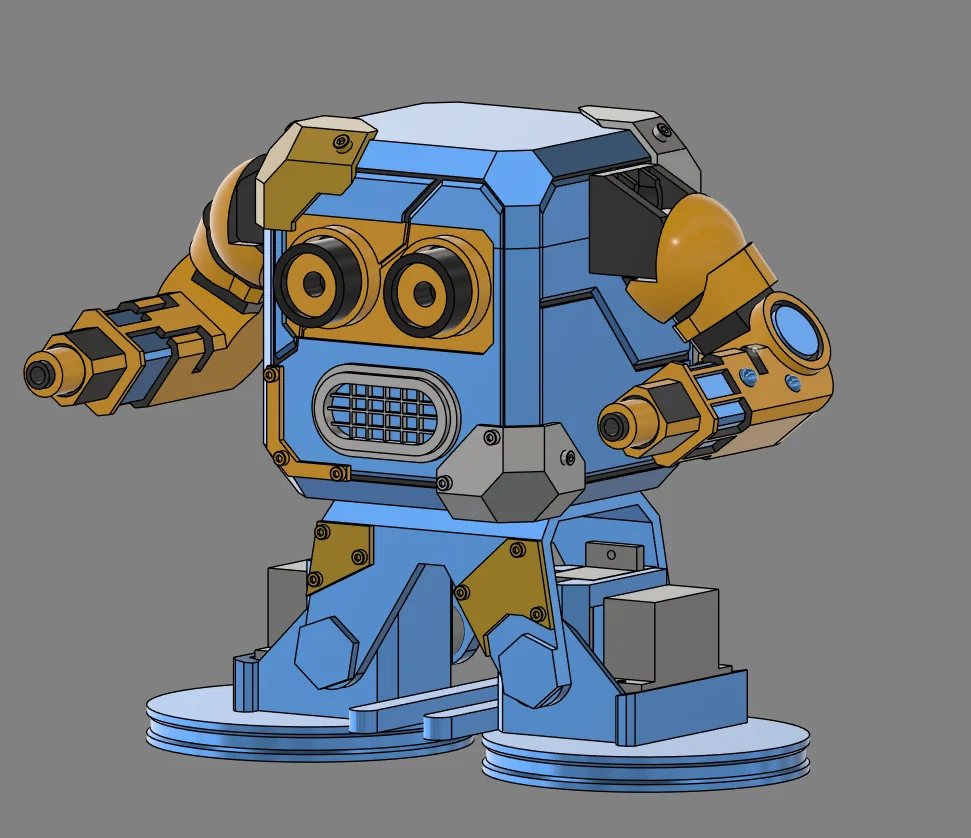
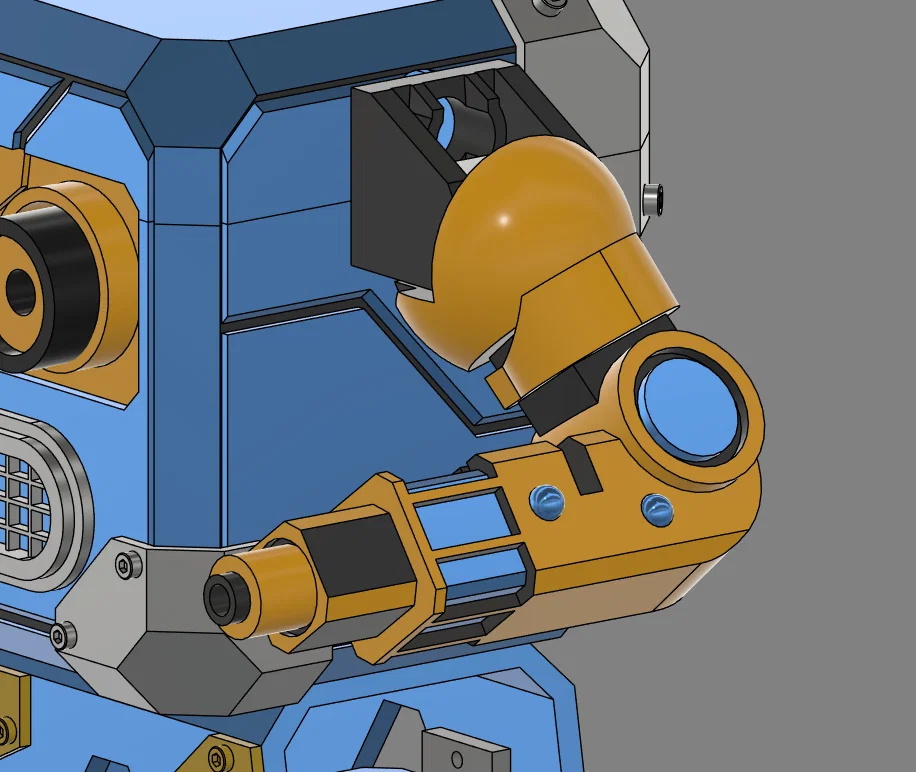
Mặc dù hoàn toàn tương thích với Otto Ninja nguyên bản, phiên bản này có một số nâng cấp đáng chú ý. Nó sử dụng sáu động cơ servo: hai servo quay liên tục 360° cho bàn chân, hai servo 180° cho chân và hai servo 180° nữa cho chuyển động của tay. Những cải tiến chính bao gồm nắp đầu (Top Lid) được thiết kế lại và mô-đun mắt đèn LED tích hợp.
Otto B.O.T. được thiết kế theo hướng mô-đun; các bộ phận riêng lẻ có thể được in và lắp ráp thêm vào các mẫu Otto hiện có. Ví dụ, bạn có thể lắp mô-đun tay vào Otto Ninja Humanoid.
Nếu bạn đã sở hữu một chiếc Otto Ninja bản tiêu chuẩn (nhỏ), chỉ cần in phần nắp đầu đã sửa đổi là có thể gắn thêm servo tay và nâng cấp lên thành bản hình nhân mà vẫn giữ nguyên kích thước nhỏ gọn ban đầu.
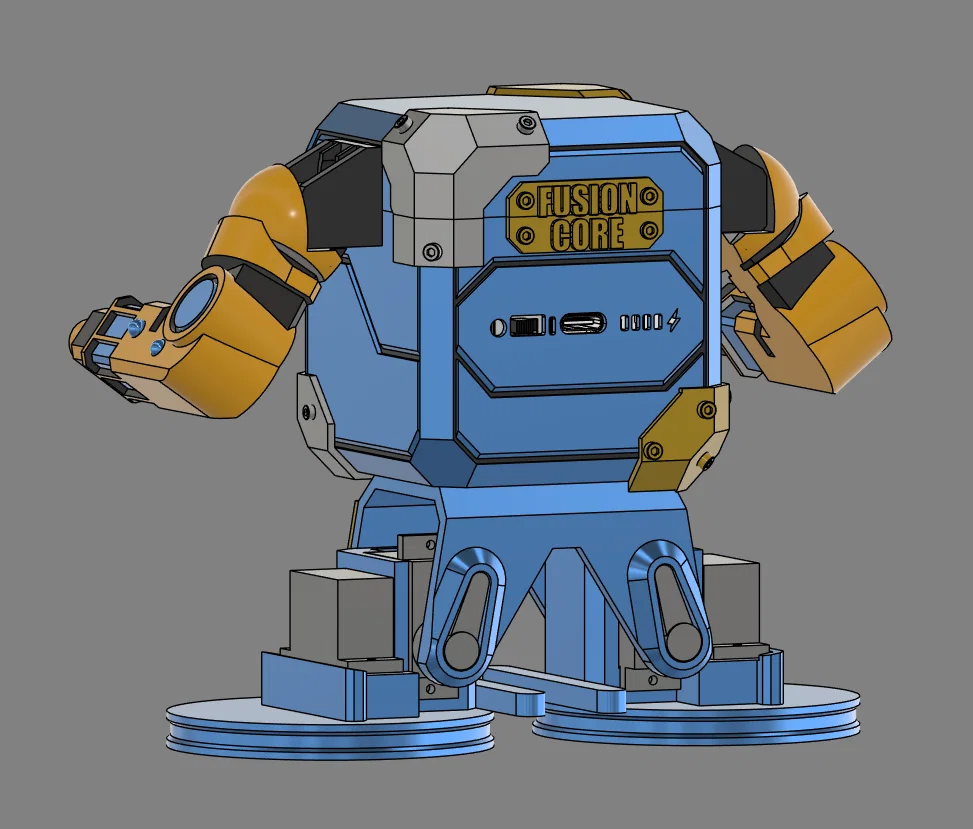
Thiết kế này cũng mang lại sự linh hoạt về thẩm mỹ và công năng. Các chi tiết giáp trang trí, được tạo hình riêng để khớp với các cạnh vát của thân Otto, đều có sẵn và có thể lắp đặt cho bất kỳ robot Otto nào bạn đang có.
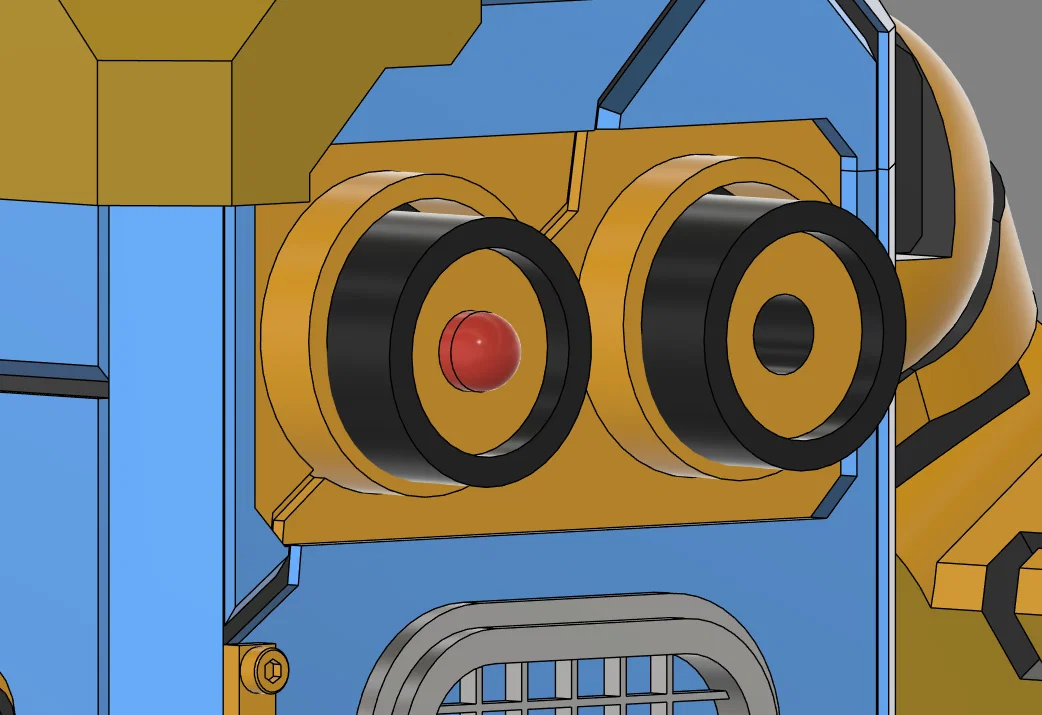
Hơn nữa, cảm biến siêu âm có thể được thay thế bằng đèn LED 5 mm sử dụng mô-đun mắt LED để tạo vẻ ngoài tùy chỉnh.
Tùy chọn Khung gầm & Điện tử
Mẫu mô hình này được thiết kế linh hoạt, mang đến hai phương án lắp ráp tùy thuộc vào linh kiện của bạn:
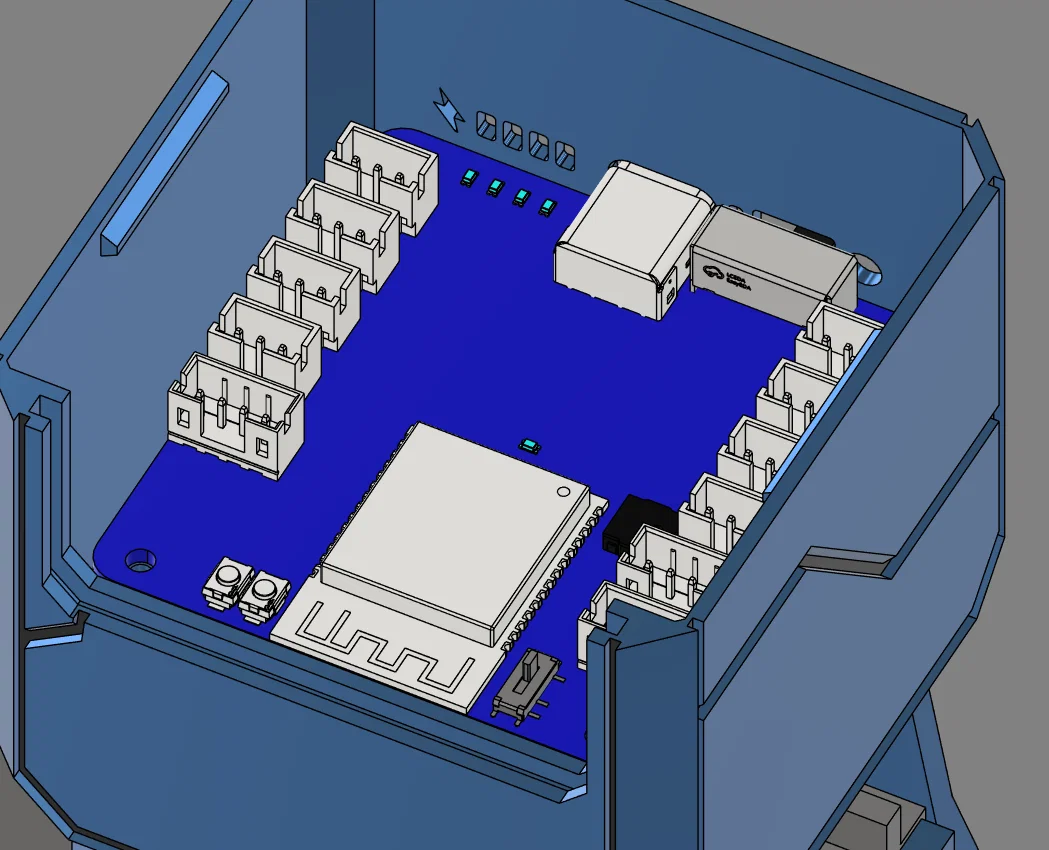
- BASE: Dùng phần này nếu bạn lắp robot với bo mạch chính thức của HP Otto. Nó được thiết kế chuẩn xác để gắn vừa khít vào PCB của HP.
- BASE-standard: Dùng phần này nếu bạn thích dùng linh kiện điện tử tiêu chuẩn (như Arduino Nano có Shield hoặc ESP32).
Thiết kế hai lựa chọn này đảm bảo Otto B.O.T. dễ tiếp cận với mọi người, cho dù bạn đang tham gia thử thách HP hay chỉ đơn giản là đang tự chế tạo một dự án riêng.

Danh sách linh kiện cần chuẩn bị (BOM)
Để chế tạo Otto B.O.T., bạn có thể chọn một trong hai phương án phần cứng:
- Điện tử (Phiên bản HP):
- 1 x Bo mạch HP Otto (PCB chính thức)
- 1 x Bộ pin tương thích
- Điện tử (Phiên bản DIY tiêu chuẩn - sử dụng BASE-standard):
- 1 x Arduino Nano với Shield HOẶC ESP32
- 1 x Mô-đun còi (buzzer) (có điểm gắn tích hợp sẵn trên phần đế)
- 1 x Công tắc bật tắt (có khe cắm chuyên dụng trên phần đế)
- 1 x Bộ pin Li-Po hoặc pin AA tương thích
- Linh kiện chung:
- 4 x Micro Servo 180° (cho chân và tay)
- 2 x Servo quay liên tục 360° (cho bàn chân)
- 2 x Vòng đệm cao su (đường kính ngoài 68 mm, đường kính trong 60 mm, độ dày 4 mm) – dùng làm lốp xe
Tùy chọn Cảm biến & Mắt
Thiết kế phần đầu rất linh hoạt, cho phép bạn chọn "diện mạo" và chức năng cho robot:
- Mô-đun mắt LED: Dùng cái này để có vẻ ngoài phong cách với hai bóng LED 5 mm.
- Cảm biến siêu âm (HC-SR04): Nếu bạn thích tính năng tránh vật cản cổ điển, phần đầu vẫn tương thích hoàn toàn với cảm biến siêu âm HC-SR04 tiêu chuẩn thay vì mô-đun LED.
Thông số in khuyến nghị
- Khuyến khích dùng máy in 3D FDM.
- Chiều cao lớp (Layer height): 0.2 mm (để đạt độ chi tiết và độ khớp tốt nhất)
- Độ đặc (Infill): 15%
- Tường (Walls): Tối thiểu 3 lớp
- Chất liệu: PLA
Hiện tại, mình cũng đang phát triển một bộ điều khiển từ xa cho robot Otto (đang trong quá trình hoàn thiện), giúp việc tương tác trở nên trực quan hơn. Dự án sắp tới này sẽ có tính năng gắn nhãn nút động cho các chức năng đã gán, cho phép điều khiển nhiều robot cùng lúc và căn chỉnh servo theo thời gian thực trực tiếp từ bộ điều khiển, loại bỏ nhu cầu lập trình lại liên tục. Bạn có thể tìm thêm thông tin và theo dõi quá trình phát triển trên trang GitHub của mình tại: https://github.com/boryspimpek/FusionPad32000.git
Giấy phép

File mô hình


























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!