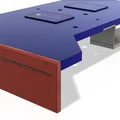
Khung robot dò đường có giá đỡ cảm biến tùy chỉnh

Khung robot dò đường được thiết kế thông minh với giá đỡ cảm biến có thể trượt điều chỉnh, giúp bạn dễ dàng cân chỉnh cảm biến. Thiết kế tối ưu cho động cơ BO, phù hợp cho người mới bắt đầu và các dự án học tập, thi đấu robot.



Mô tả
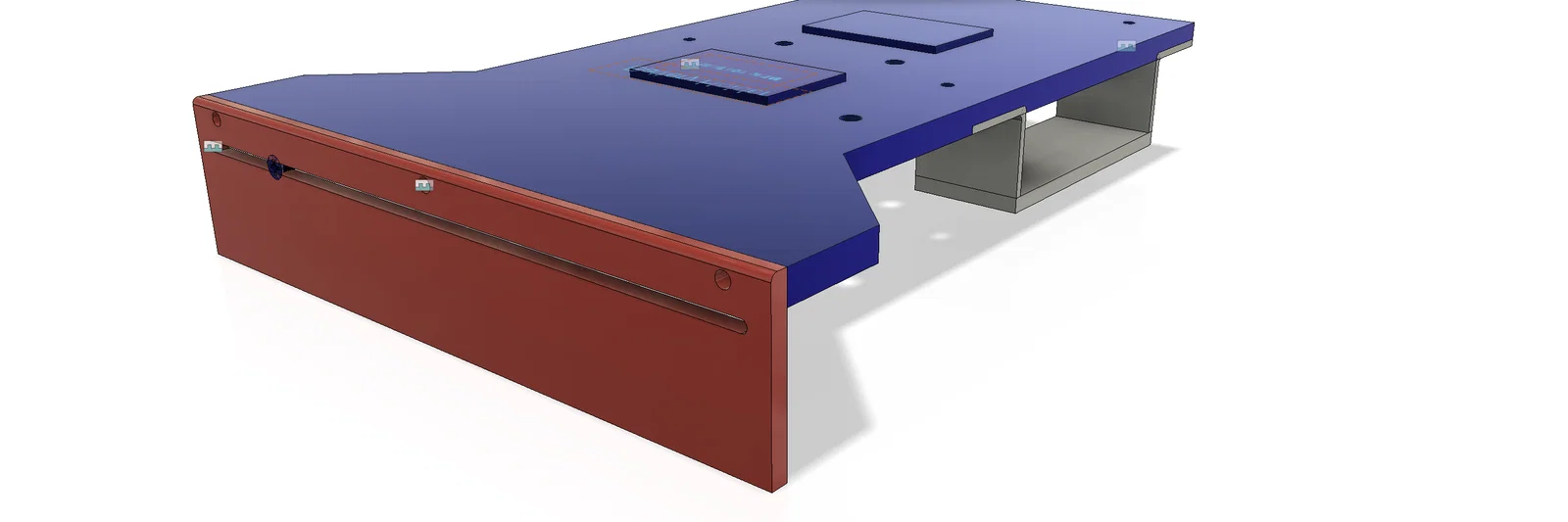
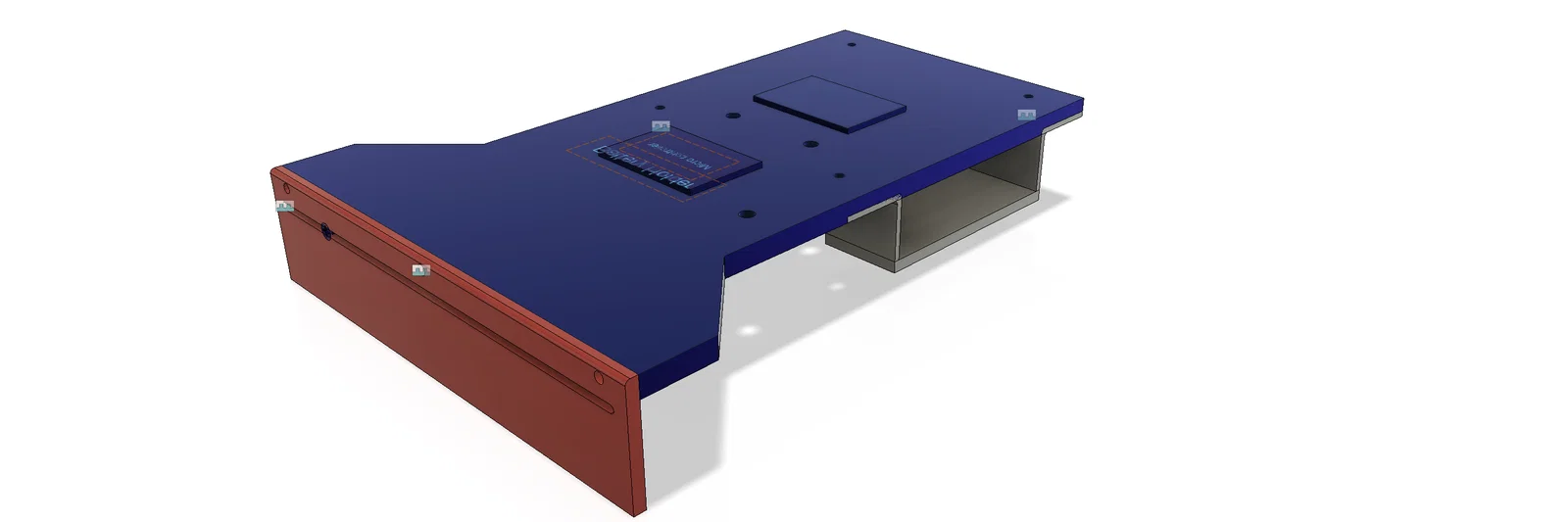
🔧 Khung Robot Dò Đường Có Thể Điều Chỉnh (Tương thích động cơ BO)
Đây là khung robot hoàn chỉnh và linh hoạt, được thiết kế chuyên dụng cho các dự án robot dò đường và học tập cơ bản. Thiết kế tập trung vào sự linh hoạt, dễ lắp ráp và tương thích tốt với các linh kiện phổ biến.
🚀 Tính năng:
-
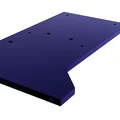
🔹 Giá đỡ cảm biến IR có thể điều chỉnh linh hoạt bằng rãnh trượt
-
🔹 Tương thích với động cơ BO tiêu chuẩn (dải tốc độ 100–300 RPM)
-
🔹 Khu vực gắn pin đa năng (có khe đi dây rút)
-
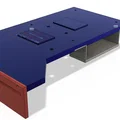
🔹 Không gian riêng để gắn mạch điều khiển động cơ (L293D) và vi điều khiển
-
🔹 Thiết kế dạng module giúp dễ dàng lắp ráp và tùy chỉnh
-
🔹 Cấu trúc nhẹ nhưng vô cùng chắc chắn
-
-
🧩 Các thành phần bao gồm:
-
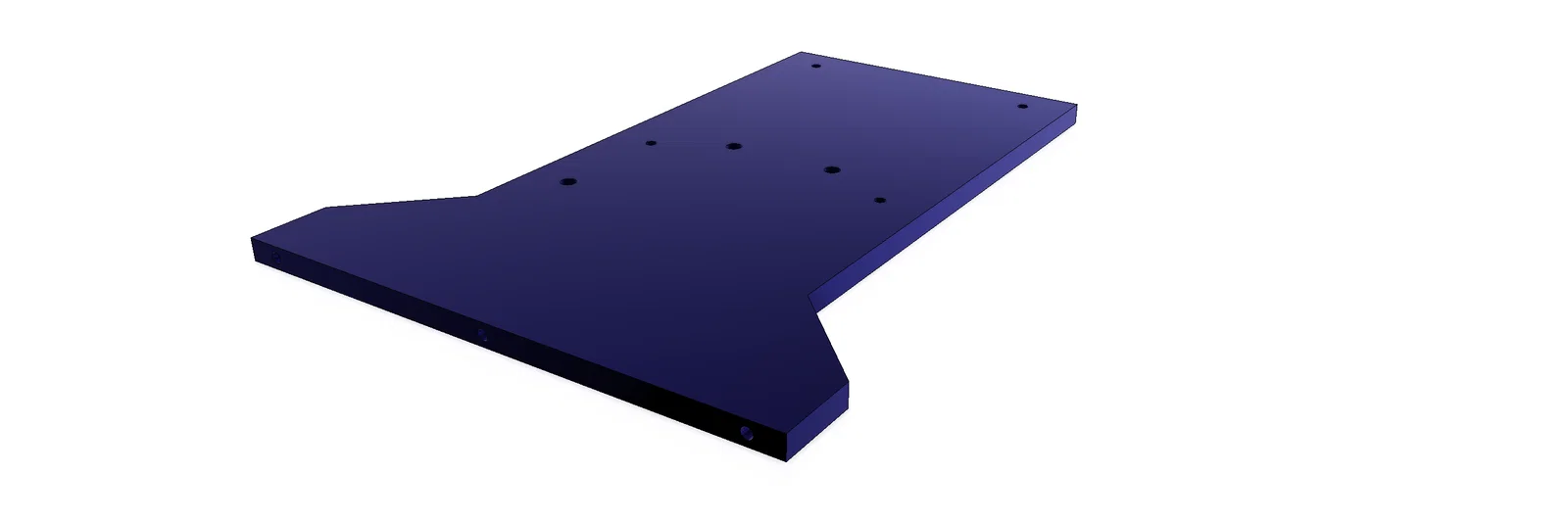
Khung robot (Chassis)
-
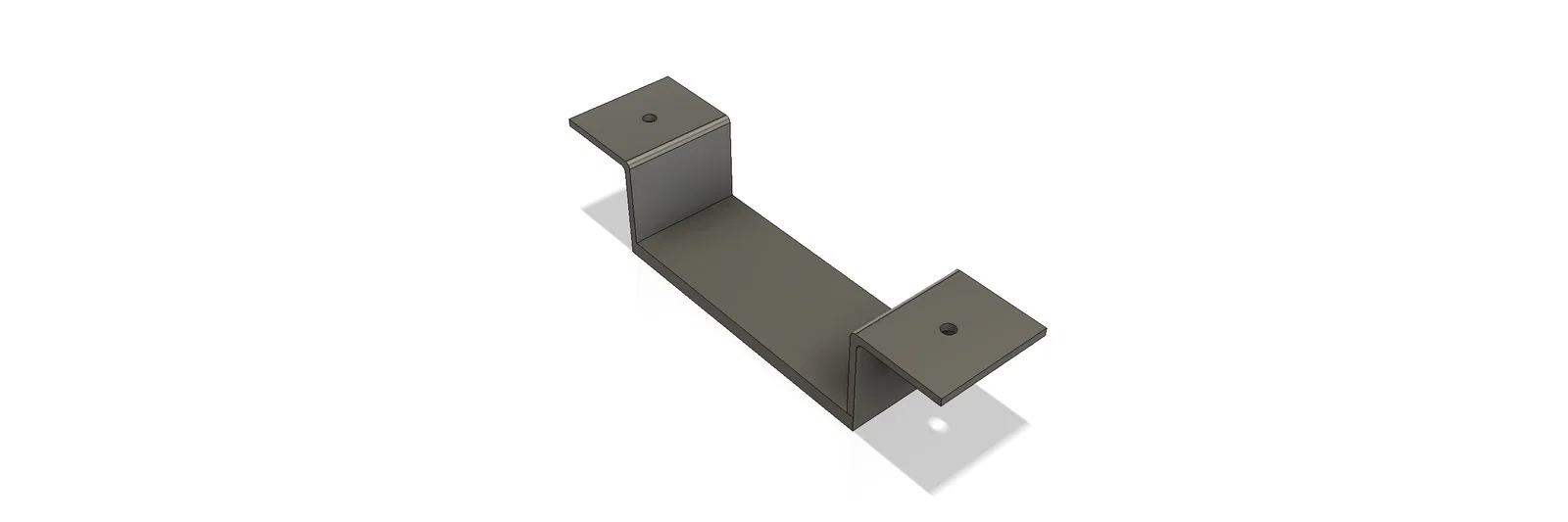
Ngàm giữ động cơ (2 cái)
-
Giá đỡ cảm biến điều chỉnh được
-
-
⚙ Linh kiện cần chuẩn bị:
-
Ốc và đai ốc M3
-
Động cơ BO (2 cái)
-
Cảm biến hồng ngoại (IR sensors)
-
Mạch điều khiển động cơ (L293D hoặc tương đương)
-
Vi điều khiển (Arduino / ESP32)
-
Pin (loại nào cũng được, cố định bằng dây rút)
-
-
🛠 Lắp ráp:
-
Gắn động cơ vào ngàm
-
Gắn các ngàm vào khung robot
-
Lắp cảm biến vào giá đỡ thông qua cơ chế rãnh trượt
-
Lắp các linh kiện điện tử vào vị trí đã được thiết kế sẵn
-
Cố định pin bằng dây rút
-
-
📌 Lưu ý:
-
Thiết kế có độ hở (tolerance) giúp lắp ráp dễ dàng
-
Phù hợp cho người mới bắt đầu và các bạn sinh viên
-
Có thể chỉnh sửa thêm dựa trên file STEP đi kèm
-
-
💡 Rất lý tưởng cho các dự án robot, thi đấu và phục vụ học tập.
🖨 Hướng dẫn in 3D
-
Chất liệu: PLA (khuyên dùng) / PETG
-
Chiều cao lớp (Layer Height): 0.2 mm
-
Độ lấp đầy (Infill): 20–30%
-
Độ dày tường (Wall Thickness): 1.2–1.6 mm
-
Tốc độ in: 40–60 mm/s
-
Hỗ trợ (Supports): Không cần thiết (đối với hầu hết các bộ phận)
-
Độ bám dính bàn in: Skirt hoặc Brim
-
-
🔧 Mẹo in ấn:
-
Đặt khung nằm phẳng trên bàn in
-
In ngàm giữ động cơ theo chiều đứng để đạt độ bền tối ưu
-
Đảm bảo bàn in được cân chỉnh chuẩn để các rãnh trượt chính xác
-
Có thể tăng infill (30%) cho phần ngàm giữ động cơ nếu cần
-
-
⚠ Độ chính xác:
-
Thiết kế đã tính toán khoảng hở giúp việc lắp ráp thuận tiện hơn
-
Nếu các chi tiết quá khít, hãy chà nhám nhẹ để khớp hơn
-
-
📦 Xử lý hậu kỳ:
- Làm sạch các cạnh nếu cần thiết
- Lắp thử các linh kiện trước khi tiến hành lắp ráp cố định
Giấy phép

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!