Dự án Cánh tay Robot Animatronic - Thiết kế in 3D chuẩn kỹ thuật

Khám phá dự án cánh tay robot Animatronic đầy ấn tượng, một sản phẩm thuộc dự án Capstone kỹ thuật cơ khí từ Ohio State University. Mô hình được thiết kế tỉ mỉ với các khớp nối in 3D linh hoạt, có khả năng cầm nắm và thao tác với các vật thể nhẹ. Bài viết hướng dẫn chi tiết về cấu trúc in, chất liệu khuyến nghị như PLA hay PETG và các mẹo lắp ráp quan trọng để bạn tự chế tạo một cánh tay robot chuyển động chuyên nghiệp. Đây là tài liệu tham khảo tuyệt vời dành cho những ai đam mê cơ khí, robot tự động hóa và in 3D, giúp bạn hiểu rõ cách vận hành và tối ưu hóa các chi tiết cơ học để đạt được sự trơn tru trong từng chuyển động.









Mô tả
Dự án Cánh tay Robot Animatronic (Animatronic Arm Capstone)
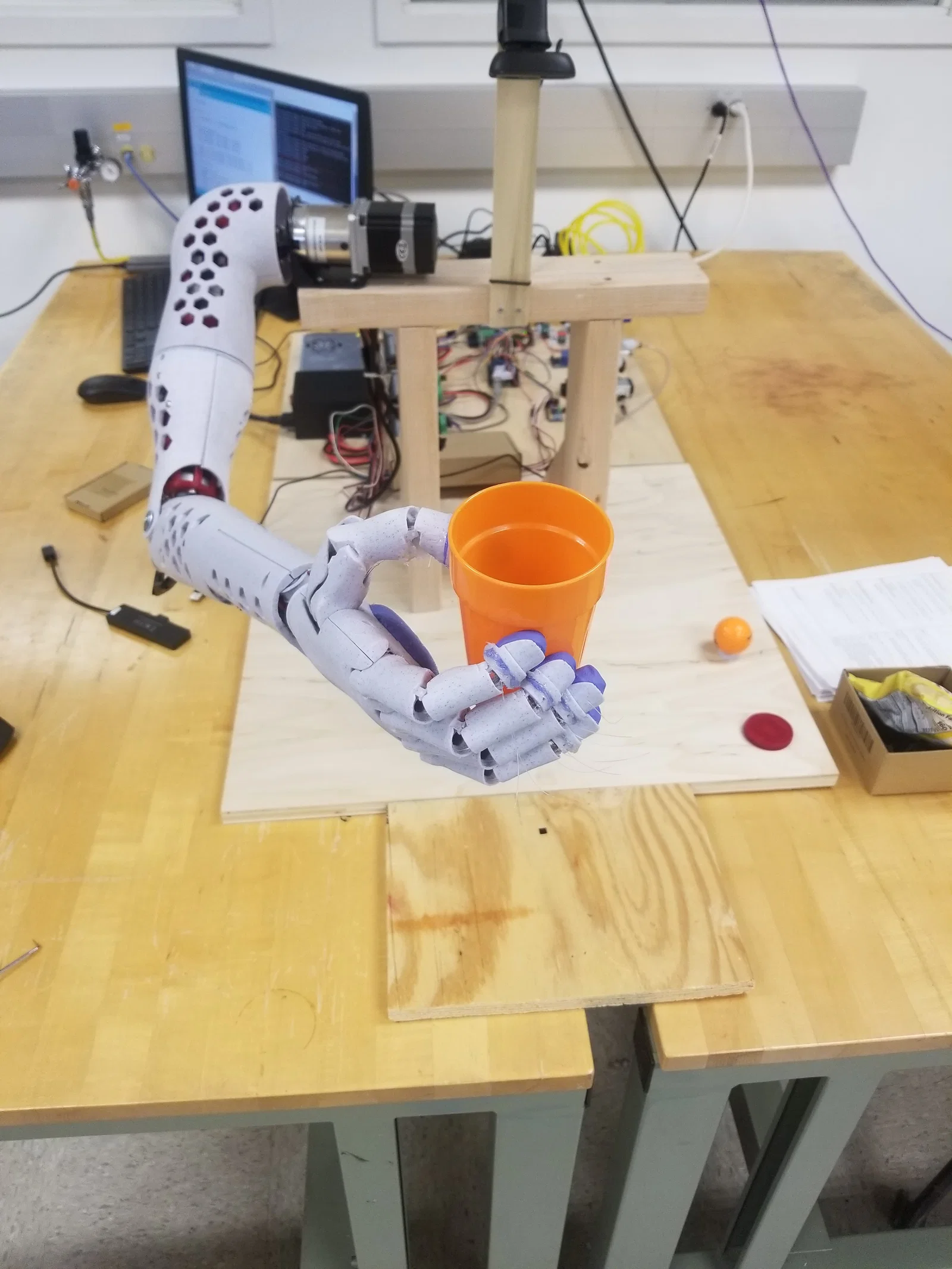
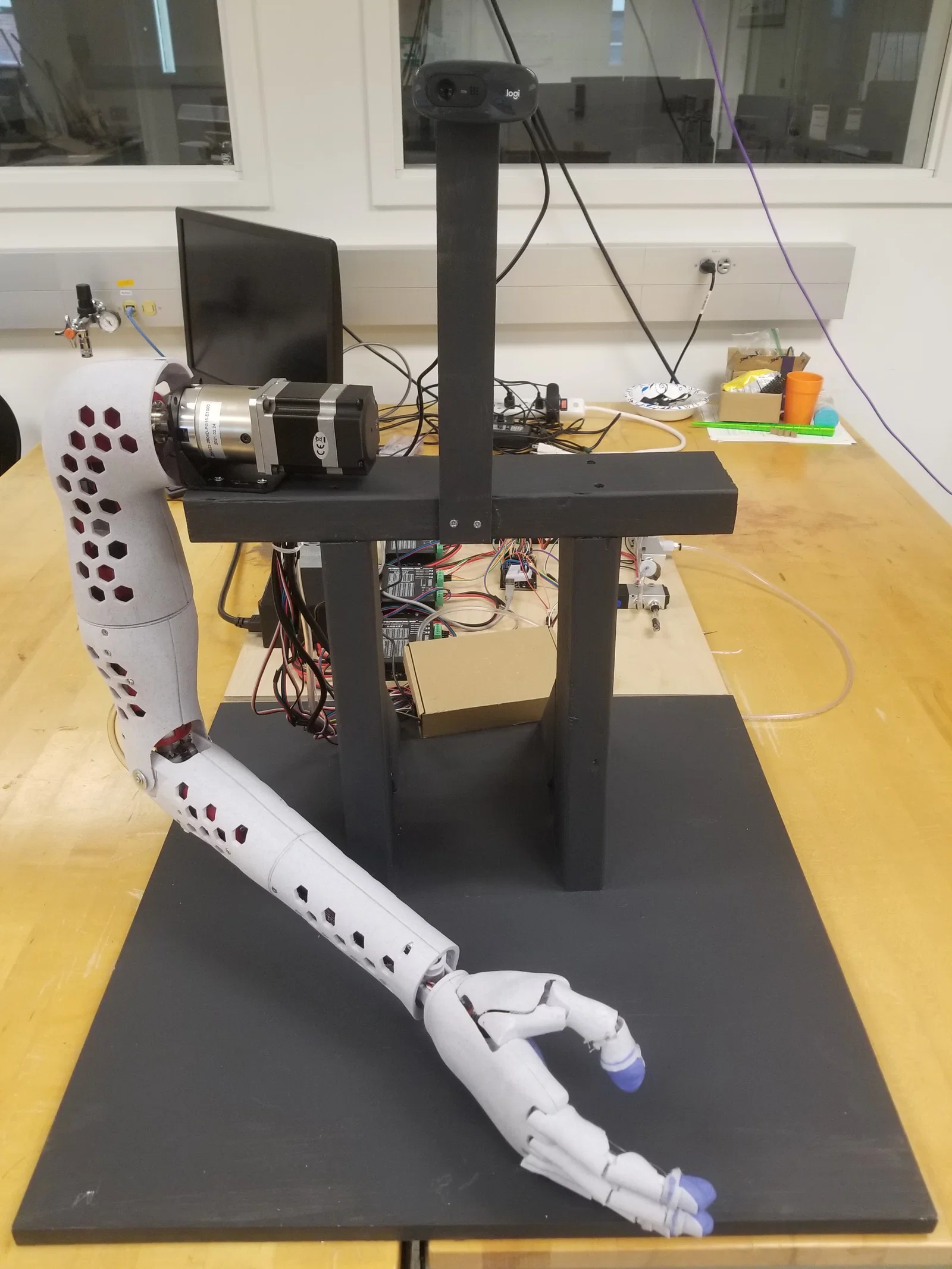
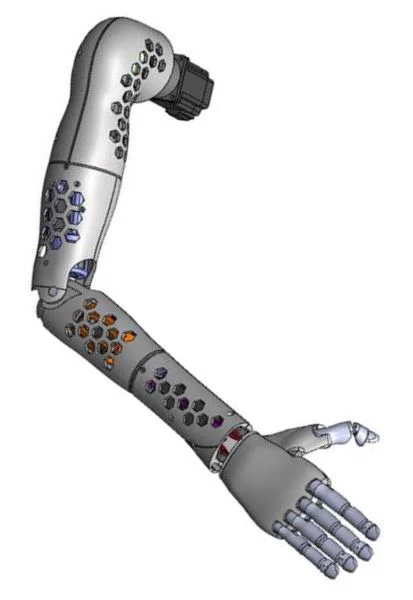
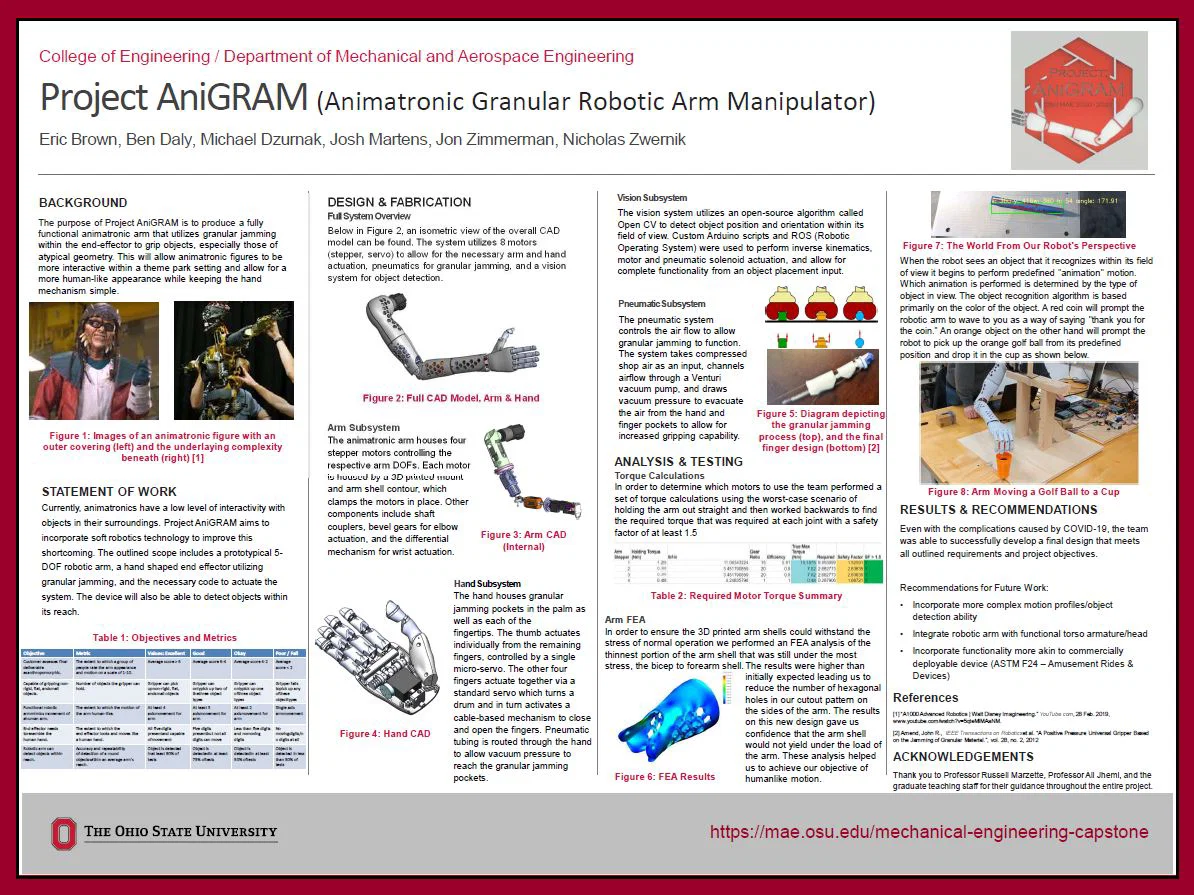
Đây là mô hình cánh tay robot mô phỏng chuyển động linh hoạt, một dự án Capstone đầy tâm huyết được thực hiện tại trường Đại học Bang Ohio (Ohio State University). Cánh tay này được thiết kế dựa trên các nguyên lý cơ học chính xác, cho phép nó thực hiện các thao tác cầm nắm vật thể nhẹ nhàng và chính xác. Đây là một ví dụ tuyệt vời cho những ai đang theo đuổi ngành kỹ thuật cơ khí, tự động hóa hoặc đơn giản là có niềm đam mê với chế tạo robot tự lắp ráp.
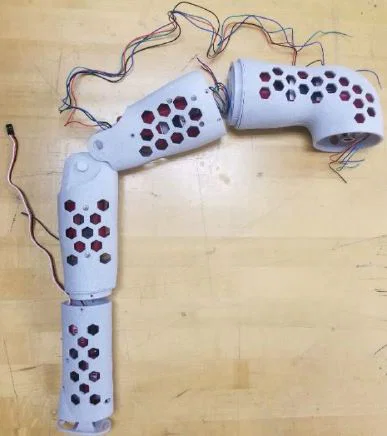
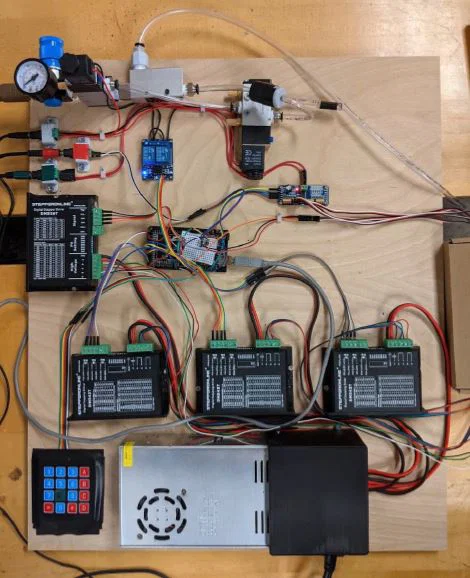
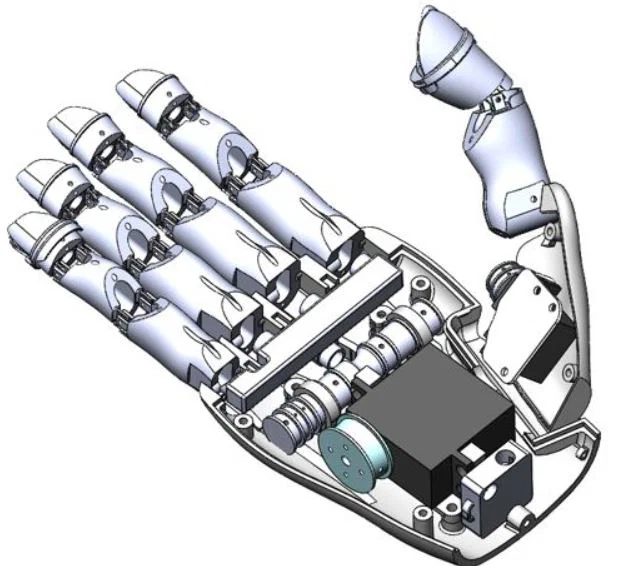
Cấu trúc của mô hình bao gồm phần khung cánh tay và bàn tay được in 3D với thiết kế thông minh, tối ưu hóa trọng lượng mà vẫn đảm bảo độ cứng cáp. Kết hợp với hệ thống động cơ bước (stepper motor) và các khớp nối linh động, cánh tay có thể thực hiện được những cử động đóng mở bàn tay để cầm nắm đồ vật như cốc nước hay các món đồ chơi nhỏ. Dự án này không chỉ là một bài tập thực hành mà còn là nền tảng để bạn nghiên cứu về lập trình điều khiển, kinematics và tích hợp cảm biến trong tương lai.
Khi bạn bắt tay vào in và lắp ráp mô hình cánh tay robot này, hãy lưu ý những điểm quan trọng sau để đạt kết quả tốt nhất:
- Chất liệu in: Nên sử dụng nhựa PLA hoặc PETG để đảm bảo độ bền và độ cứng cho các khớp nối.
- Cấu trúc in: Hãy thiết lập độ phủ (infill) khoảng 25-40% cho các bộ phận chịu lực chính để cánh tay chắc chắn hơn.
- Độ dày lớp in (Layer height): Nên để từ 0.2mm để cân bằng giữa thời gian in và độ mịn của bề mặt khớp.
- Hỗ trợ (Supports): Các bộ phận khớp nối sẽ cần in kèm support, hãy lưu ý gỡ thật sạch sau khi in để các khớp có thể chuyển động trơn tru mà không bị kẹt.
- Kiểm tra khớp: Trước khi lắp đặt động cơ, hãy đảm bảo các khớp in 3D có thể gập duỗi tự do, không bị ma sát quá lớn.
- Phụ kiện: Bạn sẽ cần chuẩn bị thêm động cơ stepper, dây cáp, vít, đai ốc và bộ điều khiển trung tâm để biến mô hình in 3D tĩnh trở thành một cánh tay hoạt động thực thụ.
Hy vọng rằng dự án này sẽ truyền cảm hứng cho bạn trong quá trình học tập và sáng tạo những thiết bị robot thông minh của riêng mình. Đây là một thử thách kỹ thuật thú vị và cực kỳ đáng giá để đưa vào bộ sưu tập mô hình kỹ thuật của bạn.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!