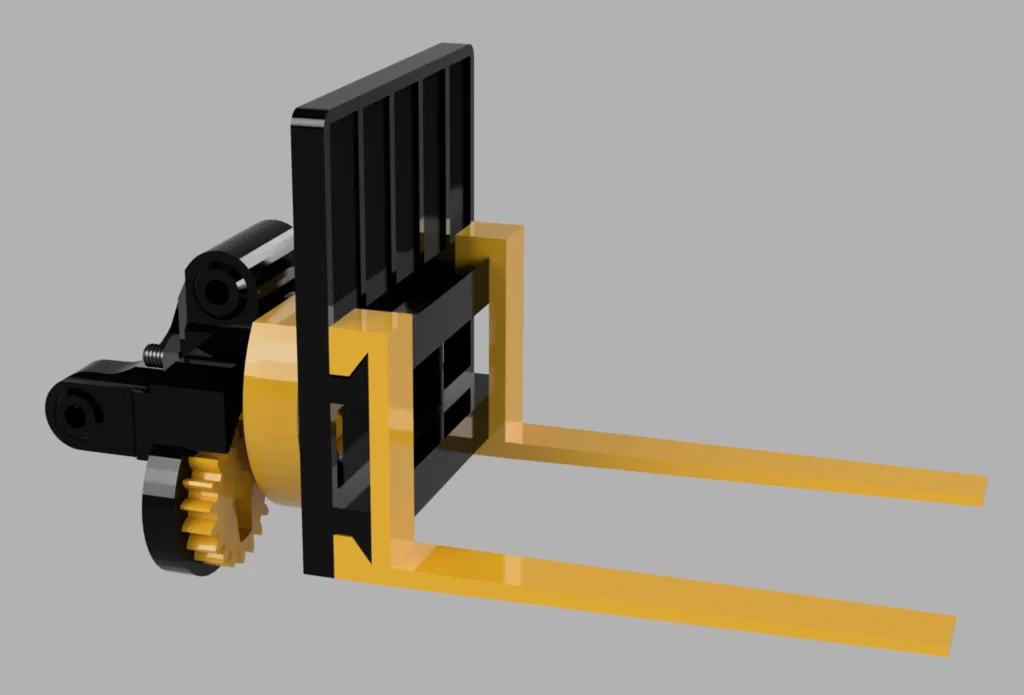
Càng xe nâng có tính năng xoay cho cánh tay robot EEZYbotARM MK2

Biến tấu cánh tay robot EEZYbotARM MK2 của bạn thành một chiếc xe nâng chuyên nghiệp với bộ càng xoay linh hoạt. Hỗ trợ tốt cho pallet tỉ lệ 1/14 và 1/16, kèm hướng dẫn chi tiết để lắp ráp dễ dàng.





Mô tả
Đây là bản remix của các bộ chuyển đổi có tính năng xoay dành cho EEZYbotARM MK2 (Mantis Gripper, v.v.) (trên Thingiverse) để lắp vào cánh tay robot EEZYbotARM MK2 (trên Thingiverse). Nó giúp bạn có thêm tùy chọn để gắp các loại pallet thu nhỏ hoặc bất cứ thứ gì mà bạn muốn nâng bằng càng xe nâng.
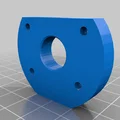
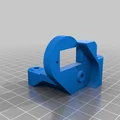
Tôi đã sử dụng một servo TGY-R5180MG từ Hobbyking.com trong "adaptor_base" để làm cho bộ phận càng nâng có thể xoay được.
Đối với pallet, tôi đã tạo ra:
- Pallet tiêu chuẩn Mỹ tỉ lệ 1/14
- Pallet tiêu chuẩn Mỹ tỉ lệ 1/16
Cả hai đều có kích thước phù hợp với phụ kiện này. Lưu ý khi in pallet, hãy đảm bảo in loại có các "thanh ván" (deck boards) ở cả mặt dưới và mặt trên, nếu không pallet sẽ dễ bị rơi khỏi càng khi bạn xoay.
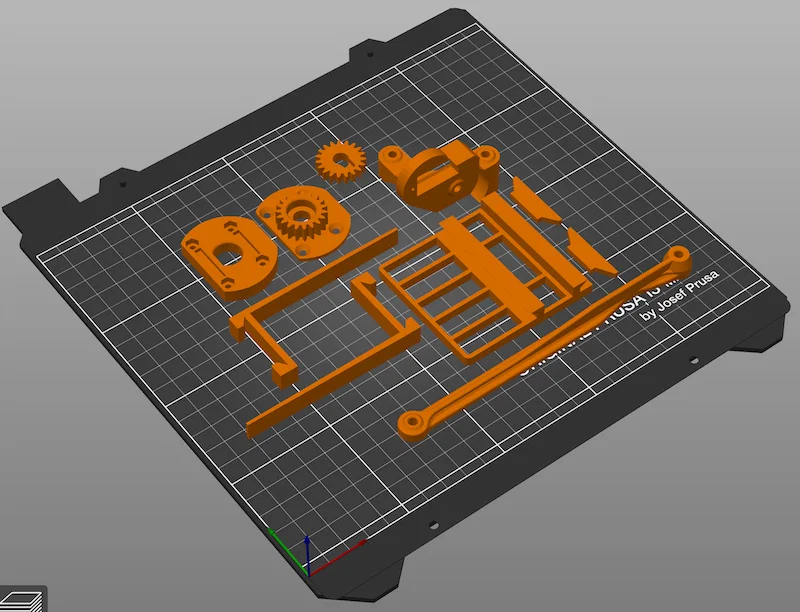
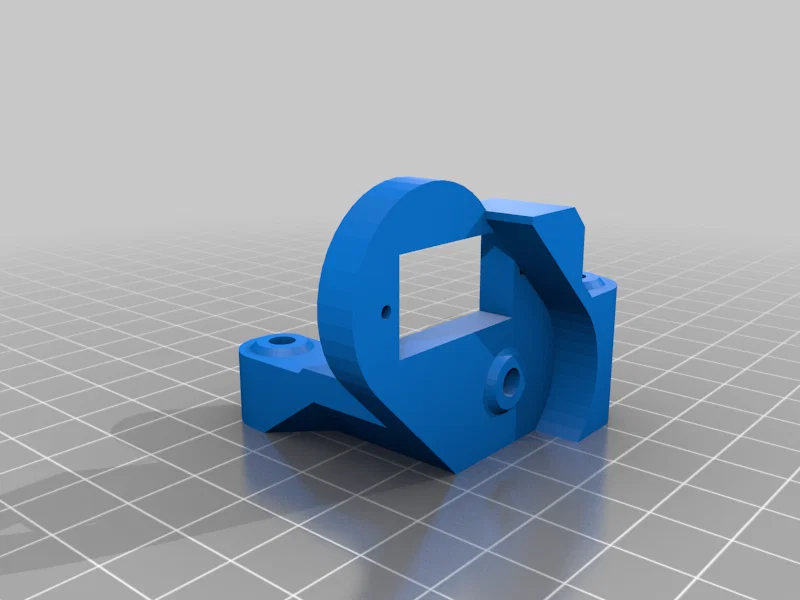
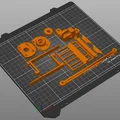
Khi cắt file (slicing), không cần dùng support TRỪ PHẦN "adaptor_base", nếu bạn đặt hướng các chi tiết giống như tôi đã làm trong phần mềm (xem ảnh trong mục hình ảnh).
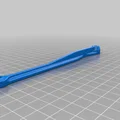
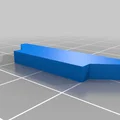
CẬP NHẬT (Tháng 3 năm 2026): Tôi đã thêm một biến thể thứ hai cho file STL của càng nâng. Phiên bản gốc được liệt kê là "forksx2", đây là kiểu càng thẳng truyền thống thường thấy trên hầu hết các loại xe nâng. Tuy nhiên, tôi nhận thấy khi di chuyển, pallet dễ bị trượt ra khỏi đầu càng. Để khắc phục, tôi đã thêm file STL thay thế có tên "fork(modified)_x2" với một phần gờ nhỏ ở đầu càng, giúp giữ pallet tốt hơn. Pallet vẫn có thể trượt nếu cánh tay robot rung lắc mạnh khi di chuyển. Bạn có thể chọn bất kỳ kiểu nào, nhưng dù chọn loại nào thì cũng cần in 2 cái.
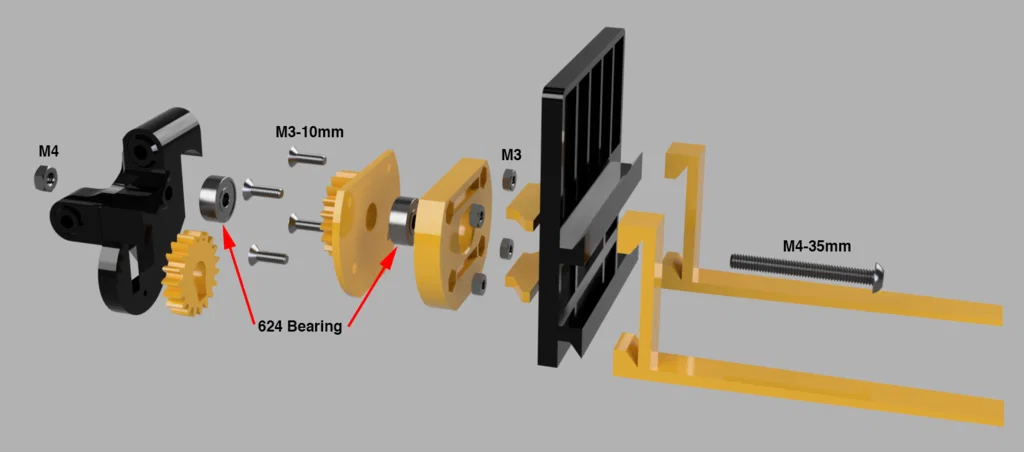
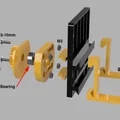
Linh kiện cần mua: • 4 ốc vít đầu âm M3-10mm • 4 đai ốc lục giác M3 • 1 ốc vít đầu tròn M4-35mm • 1 đai ốc lục giác M4 • 2 vòng bi 624 • 1 servo TGY-R5180MG (hoặc loại tương đương)
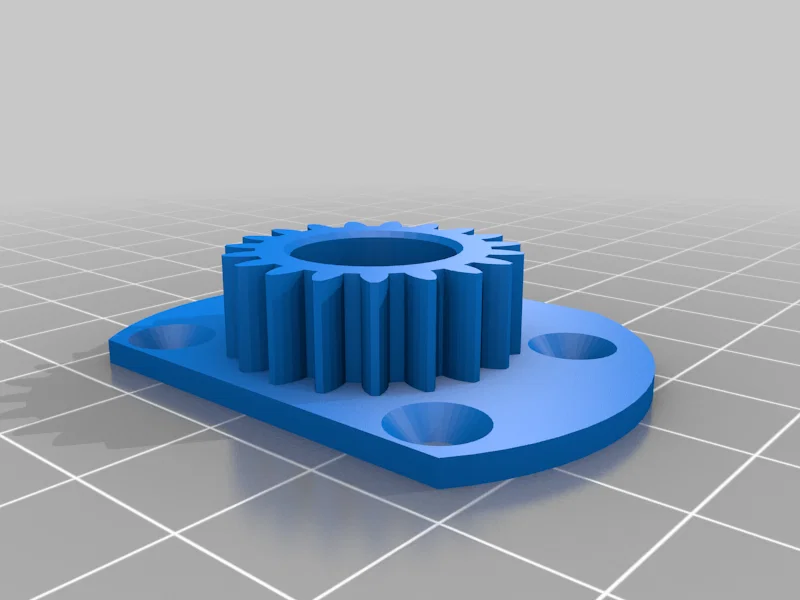
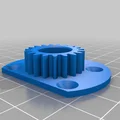
Danh sách in: • 1 adaptor_base • 1 adaptor_EBAmk2_008_link147 • 1 adaptor_gear_base • 1 adaptor_gear_v3 • 1 adaptor_ServoMount • 1 backrest_adaptor_bottom • 1 backrest_adaptor_top • 1 backrest • 2 fork_x2
Tôi cũng đã bao gồm file .STEP cho "fork_x2" để bạn có thể tùy chỉnh cho phù hợp với độ chính xác của máy in.
Thông số in
Máy in: Prusa i3 MK3 Raft: Không Support: Không Độ phân giải: 0.3mm Infill: 30% Nhựa: Prusament PLA
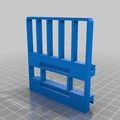
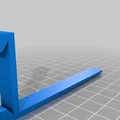
Hậu xử lý: Trước khi lắp ráp, hãy dùng keo siêu dính để gắn "backrest_adaptor_bottom" và "backrest_adaptor_top" vào các rãnh tương ứng trên "adaptor_ServoMount". "backrest_adaptor_bottom" vào rãnh chữ nhật nhỏ hơn, còn "backrest_adaptor_top" vào rãnh lớn hơn.
Trước khi dán "adaptor_ServoMount" đã lắp hoàn chỉnh vào "backrest", hãy đảm bảo "backrest" được đặt đúng hướng. Phần phẳng dài của "adaptor_ServoMount" nên nằm ở phía trên, hướng về phía đỉnh của "backrest". Dán các đầu của bộ điều hợp vào rãnh trên mặt sau của "backrest". Sau khi các bộ phận đã được dán chắc chắn, bạn có thể tiến hành lắp ráp các phần còn lại. Vui lòng tham khảo ảnh thiết kế 3D đã bung (exploded view) để lắp ráp.
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!