Robot nhện 4 chân Quad-Robotic Spider 2DOF

Chào mừng người bạn đồng hành để bàn mới. Robot nhện 4 chân này được thiết kế với độ linh hoạt cao và kiểu dáng đẹp mắt. Sử dụng ESP32 mạnh mẽ, đây là lựa chọn tuyệt vời cho các dự án robot di động và học tập STEM của bạn.




Mô tả
Robot Nhện 4 Chân | Sử dụng ESP32 với 8-DOF
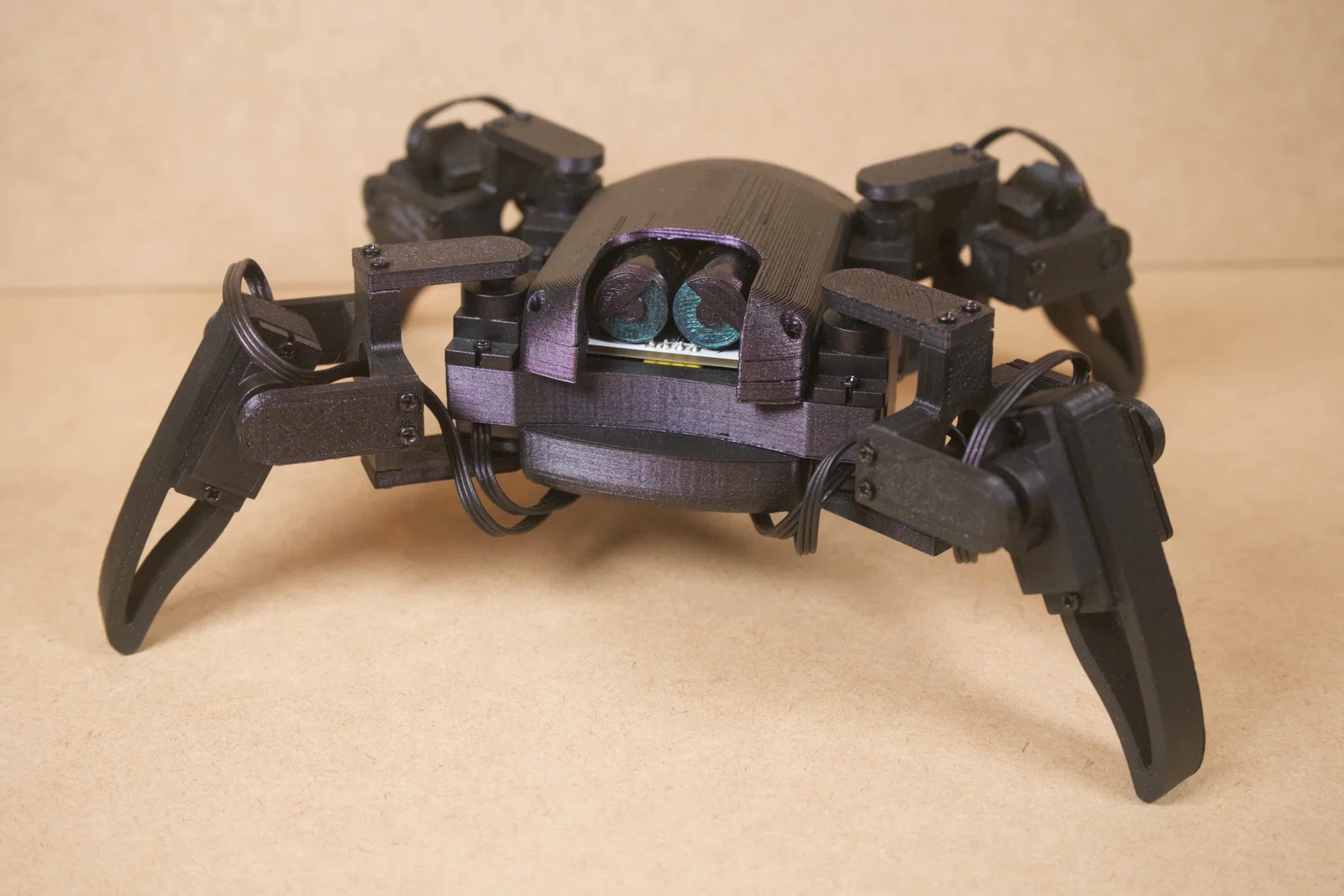
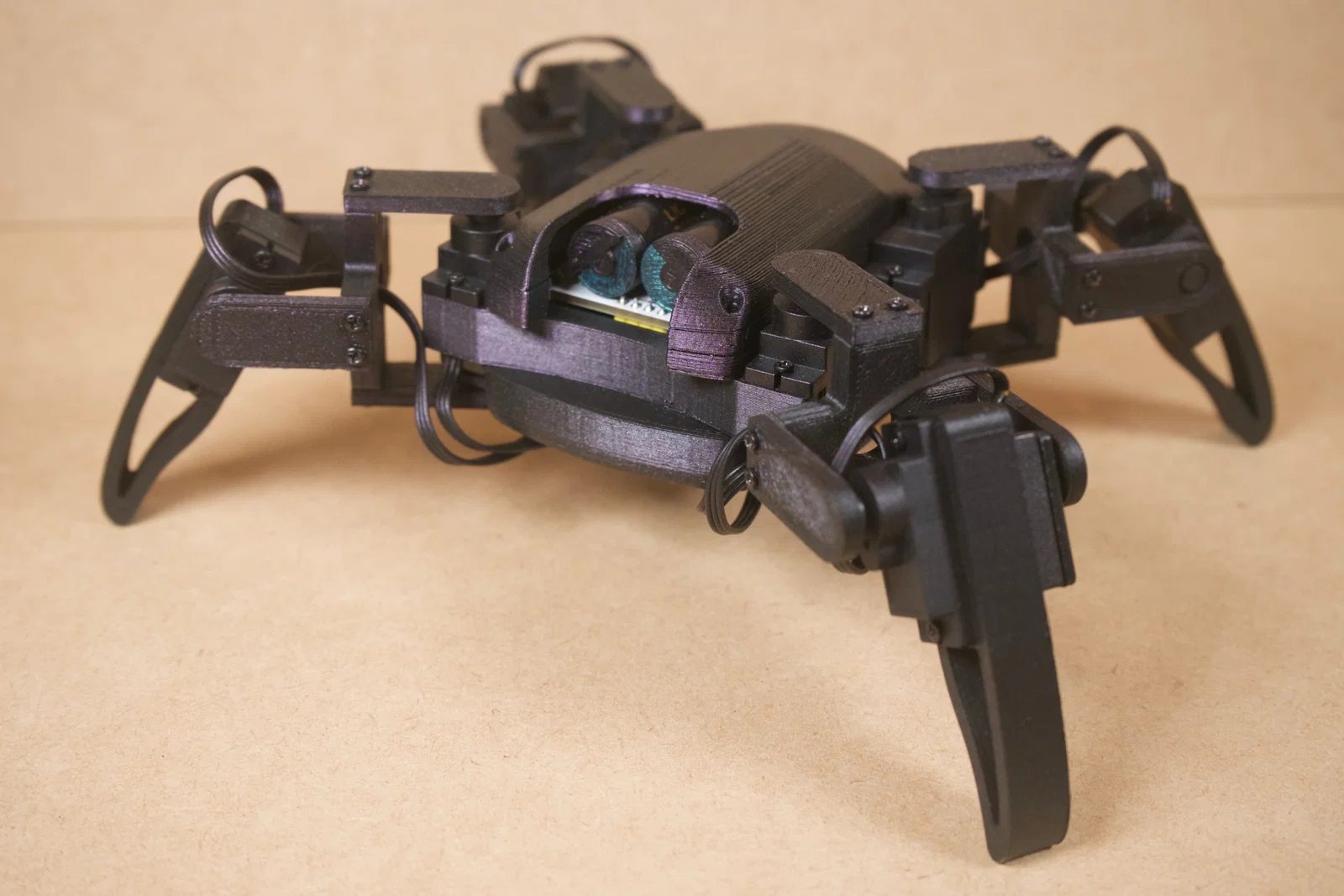
Đây là mẫu robot nhện 4 chân (quadruped) linh hoạt, được thiết kế để di chuyển mượt mà và điều khiển không dây. Bằng cách nâng cấp khung cơ bản với ESP32, dự án này có thêm khả năng kết nối WiFi/Bluetooth, biến nó thành một nền tảng hoàn hảo để điều khiển từ xa, chạy các chu trình tự động hoặc học tập STEM.
Robot sử dụng 8 động cơ servo (2 cái mỗi chân) để tạo ra các cử động giống như nhện thật, bao gồm đi bộ, xoay và tạo dáng.
Thông số kỹ thuật
-
Bộ não: ESP32 Dev Board (Sức mạnh lõi kép giúp điều phối servo mượt mà).
-
Di chuyển: 8 bậc tự do (8-DOF) sử dụng servo bánh răng kim loại MG90S để tăng độ bền.
-
Quản lý nguồn: Tích hợp bộ hạ áp MP1584 DC-DC để đảm bảo nguồn 5V ổn định, ngăn chặn tình trạng sụt áp thường gặp trong các dự án robot DIY.
-
Kết nối: Có thể điều khiển qua ứng dụng điện thoại hoặc giao diện web (thông qua ESP32).
-
-
Danh sách linh kiện (BOM)
| Linh kiện | Số lượng | Mô tả |
|---|---|---|
| ESP32 Dev Board | 1 | Vi điều khiển chính (WiFi + Bluetooth) |
| Servo TowerPro MG90S | 8 | Servo bánh răng kim loại mô-men xoắn cao (Hông & Đầu gối) |
| Các chi tiết in 3D | 29 | Tổng số chi tiết cho khung và chân |
| Ốc vít M1.7 x 8mm | ~60 | Vít tự khoan để gắn servo |
| Mạch hạ áp MP1584 | 1 | Buck converter (hạ từ 7.4V xuống 5V) |
| Pin Li-ion 18650 | 2 | Pin 3.7V mắc nối tiếp (Tổng 7.4V) |
Mẹo In và Lắp ráp
-
Cài đặt in: Tôi khuyên dùng PLA hoặc PETG với ít nhất 3 lớp vỏ (perimeter) để đảm bảo độ cứng cho các khớp nối.
-
Infill: 20% (Khuyến khích dùng Gyroid để chống rung).
-
Hiệu chỉnh: Hãy đảm bảo mạch MP1584 được chỉnh chính xác ở mức 5V bằng đồng hồ vạn năng trước khi kết nối với servo hoặc ESP32 để tránh hư hỏng linh kiện!
-
Đi dây: Sử dụng dây rút nhỏ để cố định dây servo dọc theo các đoạn chân, tránh để dây bị vướng khi robot di chuyển.
Ghi công & Nguồn
Hình học 3D cho dự án này dựa trên thiết kế tuyệt vời của RegisHsu. Phiên bản này tập trung vào việc tích hợp hệ thống điện tử và tối ưu hóa hiệu suất năng lượng bằng hệ sinh thái ESP32.
Giấy phép

File mô hình


















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!